HELSINGFORS – Japans SLIM landare uppnådde sitt mål om en exakt månlandande måne med endast en av två huvudpropeller i drift, uppgav JAXA på torsdagen, medan en liten rover returnerade en bild av rymdfarkosten.
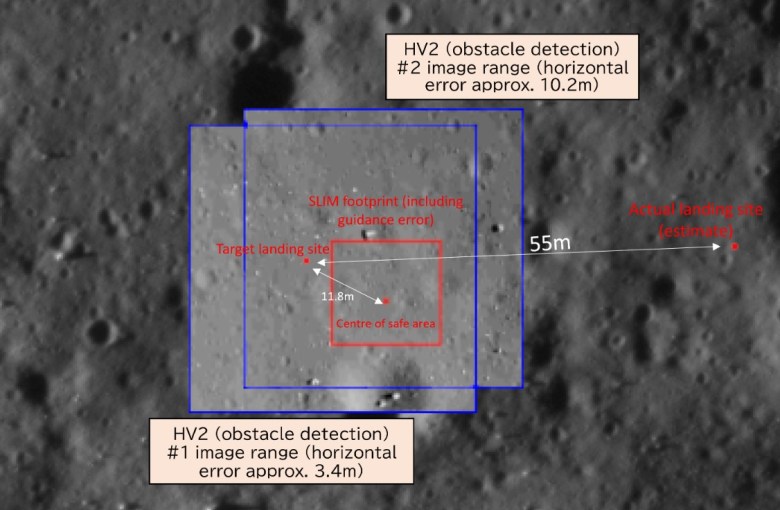
SLIM gjorde en exakt landning vid 25.24889 öst, 13.31549 söderut på Shioli-kraterns sluttning, 55 meter från målpunkten, sa Shinichiro Sakai, SLIM-teamprojektledare på JAXA, under en presskonferens tidigt på torsdagen (25 januari) för att uppfylla en nyckeluppdragskriterium.
Byrån strävade efter en landning med hög precision, definierad som inom 100 meter från målpunkten.
SLIM gjorde sitt historisk månlandning 19 januari, även framgångsrikt släppa ett par små rovers på ytan strax före touchdown. Den SLIM-landningen gjorde Japan till det femte landet att landa på månen, men problem med kraftgenerering innebar att rymdfarkostens aktiva tid på ytan var förkorta. Hoppet kvarstår dock att SLIM kan återaktiveras före slutet av månaden.
Sakai avslöjade dock att en av de två huvudpropellerna troligen misslyckades under den sista landningsfasen. Detta skedde från en höjd av 50 meter till landning, vilket resulterade i oavsiktlig sidorörelse ovanför.
"Under dessa omständigheter identifierar SLIMs inbyggda mjukvara autonomt avvikelsen, och samtidigt som den kontrollerade den horisontella positionen så mycket som möjligt, fortsatte SLIM nedstigningen med den andra motorn och rörde sig gradvis mot öster."
SLIM-landningen var tänkt att ske i två steg. Först med landande thrusters nere, sedan en mindre thruster som skjuter för att tippa rymdskeppet på sidan. SLIM dämpas sedan av fem krossbara, 3D-printade aluminiumgitterlandningsben.
En bild av SLIM tagen av en av rovers, Transformable Lunar Robot LEV-2, avslöjar att rymdfarkosten befinner sig på månens yta med sin propeller pekande uppåt. Orsaken till det uppenbara motorfelet utreds.
Landningshållningen innebar att SLIMs solpanel är vänd västerut, vilket resulterade i att den initialt inte fick solljus. Men JAXA säger att det finns en möjlighet att solcellerna kan generera elektricitet under månkvällen när belysningen förbättras.
"Även om SLIM:s aktiviteter på månen ursprungligen förväntades pågå bara några dagar, kommer de nödvändiga förberedelserna för återhämtning att fortsätta för att skaffa ytterligare tekniska och vetenskapliga data," en meddelandet läsa.
Situationen påminner om Philae-landaren som en del av Europas Rosetta-uppdrag. Philae studsade när han gjorde sitt landningsförsök på Comet 67P 2014. Den fick också problem med belysningen innan den en kort stund vaknade upp igen.
JAXA har tidigare sagt att SLIM kopplade bort sitt batteri med 12 %, som planerat, för att förhindra överurladdning. SLIM stängdes av klockan 12:57 Eastern (1757 UTC) 19 januari, bara två och en halv timme efter landning klockan 10:20 Eastern (1520 UTC).
Multiband spektroskopisk kamera (MBC) monterad på SLIM kunde fungera på prov och ta bilder innan strömmen stängdes av. JAXA publicerade en MBC-bild skapad genom att syntetisera 257 lågupplösta monokroma bilder. MBC kommer att sätta igång om SLIM kan återaktiveras.
"Förberedelser pågår för att omedelbart utföra 10-bands högupplösta spektroskopiska observationer när solbelysningsförhållandena förbättras och SLIM återhämtar sig av kraften som genereras av solpanelen," sade JAXA.
Den 2.1 kilo tunga Lunar Excursion Vehicle (LEV-1) lilla rover genomförde framgångsrikt aktiviteter på månens yta, inklusive utförda planerade hopprörelser. LEV-1 uppnådde direkt kommunikation med markstationer, inklusive en inter-robot testradiovågsdataöverföring från LEV-2. Bildförvärv av LEV-1 har inte bekräftats för närvarande, enligt JAXA.
LEV-1 är i standby-läge på månens yta. "Medan förmågan att återuppta aktiviteten finns beroende av solenergigenerering från förändringar i solens riktning, kommer ansträngningar att fortsätta att ta emot signaler från LEV-1," sa JAXA.
Den basebollstora, 0.25 kg LEV-2 rover, med smeknamnet SORA-Q, kördes på månens yta och avbildades SLIM. "Vi analyserar för närvarande andra data, inklusive körloggar, och planerar att publicera resultaten i framtiden," noterade JAXA i en meddelandet på rover.
LEV-2 utvecklades gemensamt av JAXA, Tomy, Sony och Doshisha University. Det är den minsta och lättaste månrover någonsin, enligt JAXA.
"LEV-2 "SORA-Q", som utvecklades genom att kombinera leksaksteknologi, den senaste sensorrobottekniken och JAXAs rymdteknologi, och har utmärkta autonoma drift- och rörelseegenskaper," sa Kazuyuki Funaki, chef för JAXA Space Exploration Innovation Hub.
Solnedgång över Shioli-kratern väntas runt tidig UTC 31 januari. Varken SLIM eller dess rovers bär radioisotopvärmare. De förväntas alltså inte överleva månens nattetid, då temperaturen kommer att sjunka till runt minus 130 Celsius.
- SEO-drivet innehåll och PR-distribution. Bli förstärkt idag.
- PlatoData.Network Vertical Generative Ai. Styrka dig själv. Tillgång här.
- PlatoAiStream. Web3 Intelligence. Kunskap förstärkt. Tillgång här.
- Platoesg. Kol, CleanTech, Energi, Miljö, Sol, Avfallshantering. Tillgång här.
- PlatoHealth. Biotech och kliniska prövningar Intelligence. Tillgång här.
- Källa: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- : har
- :är
- :inte
- ][s
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Able
- ovan
- Enligt
- exakt
- uppnås
- förvärva
- förvärvade
- förvärv
- Handling
- aktiv
- aktiviteter
- aktivitet
- Efter
- byrå
- syftar
- också
- an
- analys
- och
- skenbar
- ÄR
- runt
- array
- AS
- At
- försök
- attityd
- autonom
- autonomt
- grund
- batteri
- BE
- varit
- innan
- Där vi får lov att vara utan att konstant prestera,
- i korthet
- men
- by
- rum
- KAN
- kapacitet
- fånga
- fångas
- bära
- Orsak
- Celler
- Celsius
- Förändringar
- egenskaper
- omständigheter
- kombinera
- Kommunikation
- tillstånd
- Genomför
- genomfördes
- Konferens
- BEKRÄFTAT
- fortsätta
- fortsatte
- styrning
- land
- skapas
- För närvarande
- vadderad
- datum
- Dagar
- definierade
- utvecklade
- rikta
- riktning
- Direktör
- bortkopplad
- ner
- driven
- drivande
- Drop
- under
- Tidig
- öster
- östra
- ansträngningar
- el
- änden
- Motor
- Europas
- kväll
- NÅGONSIN
- utmärkt
- exekveras
- finns
- förväntat
- utforskning
- vänd
- Misslyckades
- få
- femte
- slutlig
- bränning
- Förnamn
- fem
- För
- från
- uppfylla
- ytterligare
- framtida
- generera
- genereras
- generering
- Målet
- gradvis
- Marken
- Hälften
- hög upplösning
- hoppas
- Horisontell
- ÖPPETTIDER
- Men
- html
- HTTPS
- Nav
- identifierar
- if
- bild
- bilder
- förbättrar
- in
- Inklusive
- indisk
- initialt
- Innovation
- avsedd
- in
- problem
- IT
- DESS
- jan
- Japan
- Japans
- jpg
- bara
- bara en
- Nyckel
- land
- landning
- Efternamn
- senaste
- ben
- sannolikt
- Lunar
- gjord
- Huvudsida
- Framställning
- chef
- max-bredd
- MBC
- menas
- Mission
- monokrom
- Månad
- Månen
- rörelse
- rörd
- rörelser
- mycket
- Navigering
- nödvändigt för
- Varken
- inte heller
- noterade
- nu
- observationer
- inträffa
- of
- sänkt
- on
- Ombord
- gång
- ONE
- endast
- driva
- drift
- drift
- beställa
- ursprungligen
- Övriga
- över
- par
- del
- fas
- Bilder
- Plats
- Planen
- planeras
- plato
- Platon Data Intelligence
- PlatonData
- Punkt
- placera
- Möjligheten
- möjlig
- kraft
- drivs
- exakt
- tryck
- förhindra
- tidigare
- problem
- projektet
- publicera
- sätta
- radio
- mottagande
- återhämtar
- återvinning
- frisättande
- resterna
- påminner
- resulterande
- Resultat
- Fortsätt
- avslöjade
- avslöjar
- Roboten
- robotik
- rover
- Nämnda
- vetenskaplig
- givare
- sida
- signaler
- Situationen
- Lutning
- Small
- mindre
- Mjukvara
- sol-
- Solceller
- Solkraft
- Sony
- Söder
- Utrymme
- utforskning av rymden
- rymdfarkoster
- Ange
- anges
- Stater
- Stationer
- Steg
- Framgångsrikt
- sol
- solljus
- yta
- överleva
- tagen
- Målet
- grupp
- Teknisk
- Teknologi
- testa
- den där
- Smakämnen
- Framtiden
- sedan
- Där.
- Dessa
- de
- detta
- torsdag
- Således
- tid
- Tips
- till
- tog
- mot
- leksak
- rättegång
- vände
- två
- På gång
- enheter
- universitet
- uppåt
- UTC
- vehikel
- var
- Våg
- były
- när
- som
- medan
- kommer
- med
- inom
- arbetssätt
- zephyrnet