29. maj 2023 (Nanowerk novice) Raziskovalci z Oddelka za strojništvo in bioinženiring na Univerzi v Osaki so izumili novo vrsto hodečega robota, ki za navigacijo izkorišča dinamično nestabilnost. S spreminjanjem prožnosti sklopk je mogoče robota prisiliti, da se obrača brez potrebe po zapletenih računalniških krmilnih sistemih. To delo lahko pomaga pri ustvarjanju reševalnih robotov, ki lahko prečkajo neraven teren. Večina živali na Zemlji je razvila robusten gibalni sistem z uporabo nog, ki jim zagotavlja visoko stopnjo mobilnosti v najrazličnejših okoljih. Nekoliko razočaranje so inženirji, ki so poskušali ponoviti ta pristop, pogosto ugotovili, da so roboti z nogami presenetljivo krhki. Okvara celo ene noge zaradi ponavljajočega se stresa lahko močno omeji sposobnost delovanja teh robotov. Poleg tega nadzor velikega števila sklepov, da lahko robot prečka kompleksna okolja, zahteva veliko računalniške moči. Izboljšave v tej zasnovi bi bile izjemno koristne za izdelavo avtonomnih ali polavtonomnih robotov, ki bi lahko delovali kot raziskovalna ali reševalna vozila in vstopali v nevarna območja.
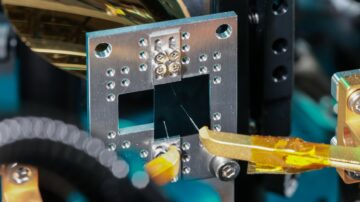
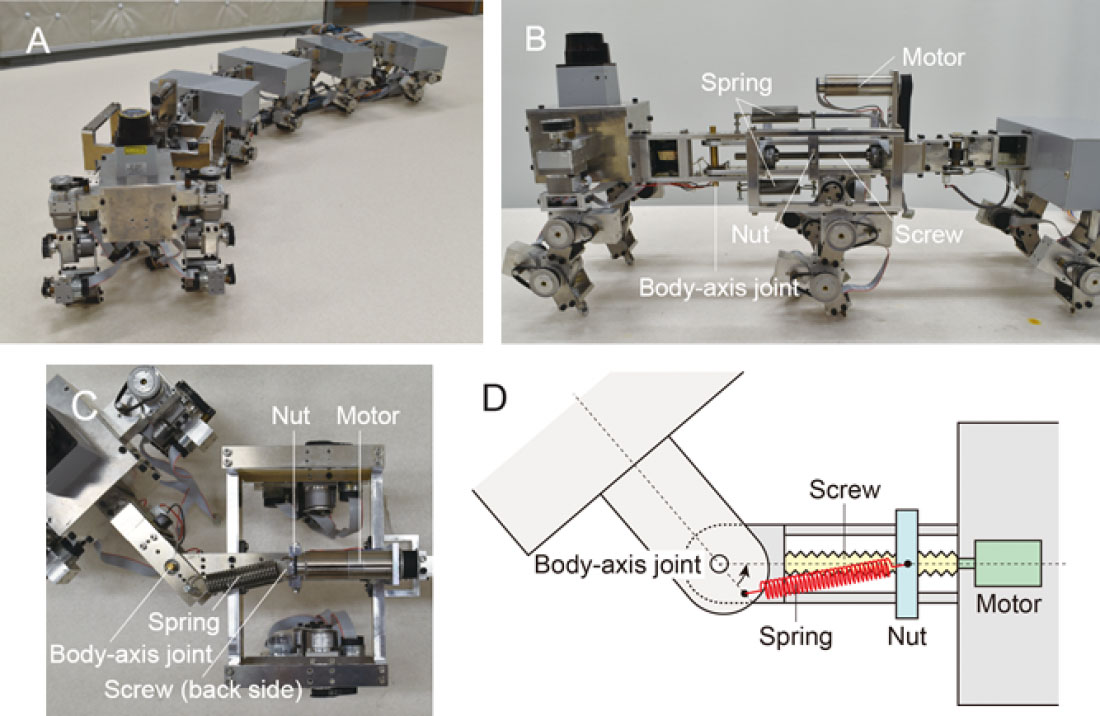 Robot Myriapod (A) in mehanizem gibljivosti spremenljive telesne osi (B. Pogled od spredaj, C. Pogled od zgoraj, D. Shema pogleda od zgoraj). (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Raziskovalci z univerze v Osaki so zdaj razvili biomimetičnega robota »myriapod«, ki izkorišča naravno nestabilnost, ki lahko naravno hojo spremeni v ukrivljeno gibanje. V študiji, nedavno objavljeni v Mehka robotika (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), raziskovalci z univerze v Osaki opisujejo svojega robota, ki je sestavljen iz šestih segmentov (z vsakim segmentom sta povezani dve nogi) in gibljivih sklepov. Z uporabo nastavljivega vijaka je mogoče z motorji spreminjati fleksibilnost sklopk med hojo. Raziskovalci so pokazali, da je povečanje gibljivosti sklepov povzročilo stanje, imenovano "bifurkacija vile", v kateri ravna hoja postane nestabilna. Namesto tega robot preide na hojo v ukrivljenem vzorcu, bodisi v desno ali v levo. Običajno bi se inženirji poskušali izogniti ustvarjanju nestabilnosti. Vendar pa lahko njihova nadzorovana uporaba omogoči učinkovito manevriranje. "Navdihnila nas je sposobnost nekaterih izjemno okretnih žuželk, ki jim omogoča nadzor nad dinamično nestabilnostjo v lastnem gibanju, da povzročijo hitre spremembe gibanja," pravi Shinya Aoi, avtorica študije. Ker ta pristop ne usmerja neposredno gibanja osi telesa, temveč nadzoruje prožnost, lahko močno zmanjša tako računalniško kompleksnost kot tudi energetske zahteve.
Robot Myriapod (A) in mehanizem gibljivosti spremenljive telesne osi (B. Pogled od spredaj, C. Pogled od zgoraj, D. Shema pogleda od zgoraj). (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Raziskovalci z univerze v Osaki so zdaj razvili biomimetičnega robota »myriapod«, ki izkorišča naravno nestabilnost, ki lahko naravno hojo spremeni v ukrivljeno gibanje. V študiji, nedavno objavljeni v Mehka robotika (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), raziskovalci z univerze v Osaki opisujejo svojega robota, ki je sestavljen iz šestih segmentov (z vsakim segmentom sta povezani dve nogi) in gibljivih sklepov. Z uporabo nastavljivega vijaka je mogoče z motorji spreminjati fleksibilnost sklopk med hojo. Raziskovalci so pokazali, da je povečanje gibljivosti sklepov povzročilo stanje, imenovano "bifurkacija vile", v kateri ravna hoja postane nestabilna. Namesto tega robot preide na hojo v ukrivljenem vzorcu, bodisi v desno ali v levo. Običajno bi se inženirji poskušali izogniti ustvarjanju nestabilnosti. Vendar pa lahko njihova nadzorovana uporaba omogoči učinkovito manevriranje. "Navdihnila nas je sposobnost nekaterih izjemno okretnih žuželk, ki jim omogoča nadzor nad dinamično nestabilnostjo v lastnem gibanju, da povzročijo hitre spremembe gibanja," pravi Shinya Aoi, avtorica študije. Ker ta pristop ne usmerja neposredno gibanja osi telesa, temveč nadzoruje prožnost, lahko močno zmanjša tako računalniško kompleksnost kot tudi energetske zahteve.
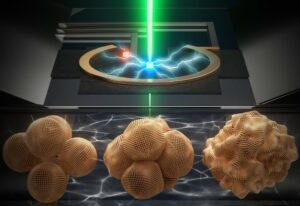
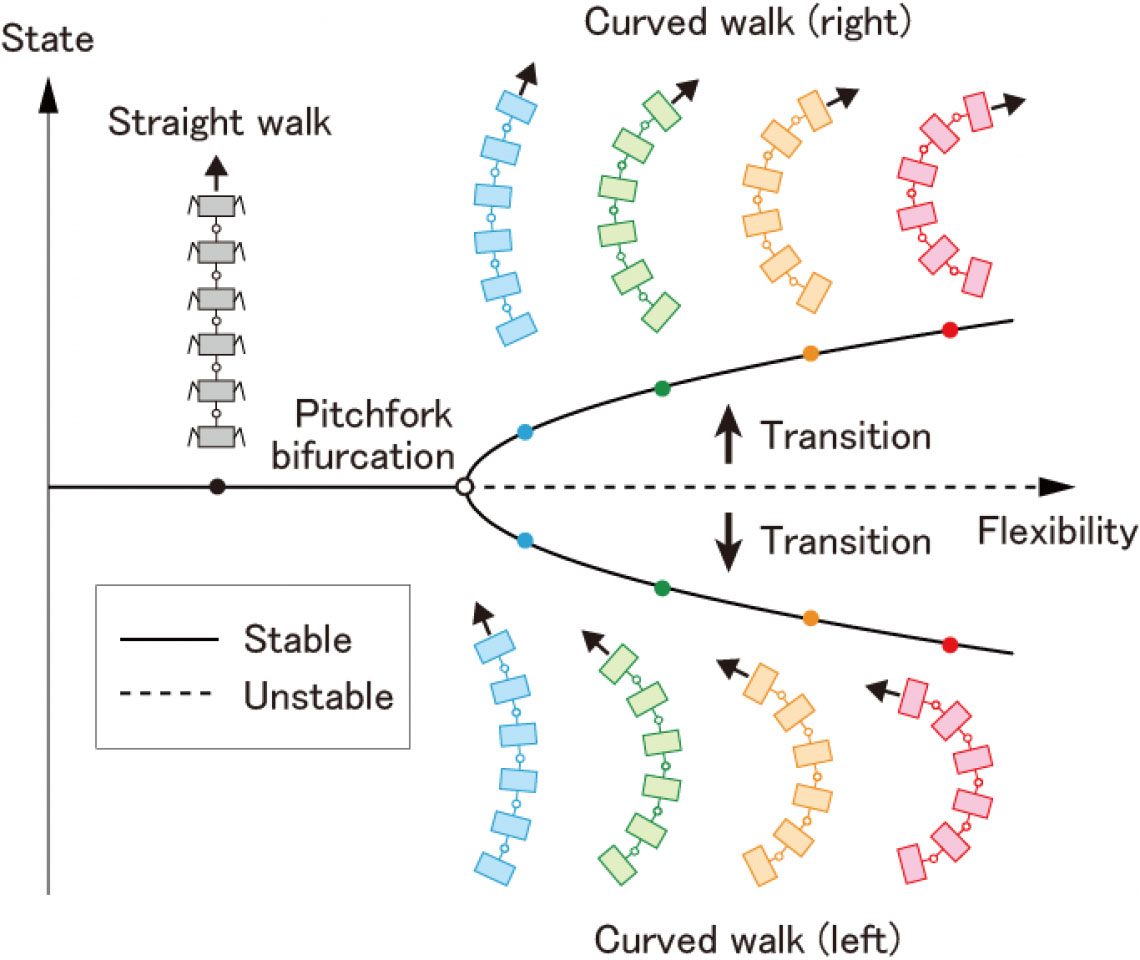 Stabilni in nestabilni vzorci hoje glede na gibljivost telesne osi. (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ekipa je preizkusila sposobnost robota, da doseže določene lokacije, in ugotovila, da lahko krmari z ukrivljenimi potmi proti ciljem. »Predvidimo lahko aplikacije v najrazličnejših scenarijih, kot so iskanje in reševanje, delo v nevarnih okoljih ali raziskovanje na drugih planetih,« pravi Mau Adachi, drugi avtor študije. Prihodnje različice lahko vključujejo dodatne segmente in nadzorne mehanizme.
Stabilni in nestabilni vzorci hoje glede na gibljivost telesne osi. (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ekipa je preizkusila sposobnost robota, da doseže določene lokacije, in ugotovila, da lahko krmari z ukrivljenimi potmi proti ciljem. »Predvidimo lahko aplikacije v najrazličnejših scenarijih, kot so iskanje in reševanje, delo v nevarnih okoljih ali raziskovanje na drugih planetih,« pravi Mau Adachi, drugi avtor študije. Prihodnje različice lahko vključujejo dodatne segmente in nadzorne mehanizme.
Robot Myriapod (A) in mehanizem gibljivosti spremenljive telesne osi (B. Pogled od spredaj, C. Pogled od zgoraj, D. Shema pogleda od zgoraj). (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Raziskovalci z univerze v Osaki so zdaj razvili biomimetičnega robota »myriapod«, ki izkorišča naravno nestabilnost, ki lahko naravno hojo spremeni v ukrivljeno gibanje. V študiji, nedavno objavljeni v Mehka robotika (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), raziskovalci z univerze v Osaki opisujejo svojega robota, ki je sestavljen iz šestih segmentov (z vsakim segmentom sta povezani dve nogi) in gibljivih sklepov. Z uporabo nastavljivega vijaka je mogoče z motorji spreminjati fleksibilnost sklopk med hojo. Raziskovalci so pokazali, da je povečanje gibljivosti sklepov povzročilo stanje, imenovano "bifurkacija vile", v kateri ravna hoja postane nestabilna. Namesto tega robot preide na hojo v ukrivljenem vzorcu, bodisi v desno ali v levo. Običajno bi se inženirji poskušali izogniti ustvarjanju nestabilnosti. Vendar pa lahko njihova nadzorovana uporaba omogoči učinkovito manevriranje. "Navdihnila nas je sposobnost nekaterih izjemno okretnih žuželk, ki jim omogoča nadzor nad dinamično nestabilnostjo v lastnem gibanju, da povzročijo hitre spremembe gibanja," pravi Shinya Aoi, avtorica študije. Ker ta pristop ne usmerja neposredno gibanja osi telesa, temveč nadzoruje prožnost, lahko močno zmanjša tako računalniško kompleksnost kot tudi energetske zahteve.
Stabilni in nestabilni vzorci hoje glede na gibljivost telesne osi. (Slika: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ekipa je preizkusila sposobnost robota, da doseže določene lokacije, in ugotovila, da lahko krmari z ukrivljenimi potmi proti ciljem. »Predvidimo lahko aplikacije v najrazličnejših scenarijih, kot so iskanje in reševanje, delo v nevarnih okoljih ali raziskovanje na drugih planetih,« pravi Mau Adachi, drugi avtor študije. Prihodnje različice lahko vključujejo dodatne segmente in nadzorne mehanizme.
- Distribucija vsebine in PR s pomočjo SEO. Okrepite se še danes.
- PlatoAiStream. Podatkovna inteligenca Web3. Razširjeno znanje. Dostopite tukaj.
- Kovanje prihodnosti z Adryenn Ashley. Dostopite tukaj.
- Kupujte in prodajajte delnice podjetij pred IPO s PREIPO®. Dostopite tukaj.
- vir: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ne
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- sposobnost
- Sposobna
- Zakon
- Poleg tega
- Dodatne
- nastavljiva
- Prednost
- okreten
- AL
- omogoča
- an
- in
- Živali
- Še ena
- aplikacije
- pristop
- SE
- območja
- AS
- pomoč
- At
- poskus
- Avtor
- avtonomno
- izogniti
- Os
- BE
- ker
- postane
- telo
- tako
- Razčlenitev
- Building
- vendar
- by
- se imenuje
- CAN
- center
- nekatere
- Spremembe
- spreminjanje
- kompleksna
- kompleksnost
- računalnik
- moč računalnika
- povezane
- nadzor
- nadzorom
- nadzor
- Nadzor
- pretvorbo
- bi
- Ustvarjanje
- Oblikovanje
- Nevarno
- Datum
- Stopnja
- Oddelek
- Odvisno
- opisati
- Oblikovanje
- razvili
- neposredno
- ne
- 2
- med
- dinamično
- E&T
- vsak
- Zemlja
- učinkovite
- bodisi
- omogočajo
- energija
- Inženirji
- Vnesite
- okolja
- Tudi
- razvil
- raziskovanje
- izredno
- prilagodljivost
- prilagodljiv
- za
- je pokazala,
- iz
- spredaj
- funkcija
- Prihodnost
- Go
- zelo
- Imajo
- visoka
- Vendar
- HTTPS
- slika
- Izboljšave
- in
- vključujejo
- narašča
- navdih
- nestabilnost
- Namesto
- v
- Izmišljeno
- Preiskovalci
- IT
- jpg
- Otrok
- velika
- Led
- levo
- noge
- LIMIT
- Lokacije
- Sklop
- je
- Izdelava
- Maj ..
- mehanska
- Mehanizem
- Mehanizmi
- Bližnji
- mobilnost
- spremembe
- Najbolj
- motion
- Motorji
- Gibanje
- naravna
- Krmarjenje
- Nimate
- Novo
- Običajno
- zdaj
- Številka
- of
- pogosto
- on
- ONE
- or
- Ostalo
- več
- lastne
- Vzorec
- vzorci
- Planeti
- platon
- Platonova podatkovna inteligenca
- PlatoData
- moč
- zagotavlja
- objavljeno
- Hitri
- območje
- precej
- dosežejo
- Pred kratkim
- zmanjša
- ponovi
- Zahteve
- zahteva
- reševanje
- raziskovalci
- Pravica
- robot
- robotika
- roboti
- robusten
- pravi
- scenariji
- Znanost
- Iskalnik
- Segment
- segmentih
- resno
- je pokazala,
- Razmere
- SIX
- So
- Soft
- nekoliko
- specifična
- stabilna
- naravnost
- stres
- študija
- taka
- sistem
- sistemi
- meni
- ob
- Cilji
- skupina
- da
- O
- njihove
- Njih
- te
- ta
- do
- vrh
- proti
- prehodi
- poskusite
- OBRAT
- dva
- univerza
- uporaba
- uporabo
- raznolikost
- Vozila
- preko
- Poglej
- hoja
- Dobro
- so bili
- ki
- WHO
- široka
- Širok spekter
- z
- brez
- delo
- deluje
- bi
- zefirnet
Več od Nanowerk


Origami temelječa integracija robotov, ki zaznavajo, odločajo in se odzivajo
Izvorno vozlišče: 2565107
Časovni žig: April 4, 2023
Dvo/kvazi-dvodimenzionalne heterostrukture na osnovi perovskita: konstrukcija, lastnosti in aplikacije
Izvorno vozlišče: 1938788
Časovni žig: Februar 3, 2023

Razkrit je visoko učinkovit postopek cepitve vode
Izvorno vozlišče: 1949683
Časovni žig: Februar 10, 2023
Raziskovalci podrobno opisujejo še nikoli videne lastnosti družine superprevodnih kovin Kagome
Izvorno vozlišče: 1952937
Časovni žig: Februar 11, 2023
Integrirana fotonska vezja bi lahko pomagala zapreti "terahertz vrzel"
Izvorno vozlišče: 1899339
Časovni žig: Jan 14, 2023

Emisije ogljika iz gnojil bi lahko do leta 80 zmanjšali za kar 2050 %
Izvorno vozlišče: 1951214
Časovni žig: Februar 11, 2023
Novi feroelektriki za učinkovitejšo mikroelektroniko
Izvorno vozlišče: 2716345
Časovni žig: Junij 9, 2023
Kako bakrov nanokatalizator, ki podira rekorde, pretvori CO2 v tekoča goriva
Izvorno vozlišče: 1961058
Časovni žig: Februar 16, 2023
Raziskovalci 3D tiskajo funkcionalno človeško možgansko tkivo
Izvorno vozlišče: 3093799
Časovni žig: Februar 2, 2024
Razvoj tehnologij za zmanjšanje stroškov proizvodnje zelenega vodika
Izvorno vozlišče: 2700260
Časovni žig: Junij 2, 2023
Odkrivanje skrivnosti vrtenja z visokoharmoničnimi sondami
Izvorno vozlišče: 2969974
Časovni žig: November 10, 2023