Ta kratka objava opisuje nekatere izboljšave laserske postaje, ki smo jih naredili, da lahko svoje poskuse izvajamo na daljavo.
Težave z nastavitvijo
Naša platforma za lasersko vbrizgavanje napak je narejena iz mikroskopa, ki se uporablja za fokusiranje laserskega vira navzdol na preskušano napravo. Opremljen je z infrardečo kamero za opazovanje notranje arhitekture ciljnega čipa in prilagajanje oblike laserskega žarka. Na srečo je opremljen z motorizirano stopnjo, ki omogoča premikanje laserskega žarka po čipu iz naše programske aplikacije po meri. Vsa orodja, ki smo jih razvili, delujejo na operacijskem sistemu Linux, zato jih je možno uporabljati preko SSH povezave, če imate dobro internetno povezavo. Soočili smo se z nekaterimi težavami z zakasnitvijo pri živi sliki kamere mikroskopa, ki smo jih hitro rešili z vklopom možnosti stiskanja SSH (-C), ki privzeto ni omogočen in močno zmanjša zahtevano pasovno širino pretakanja. Kljub temu so takrat nekateri elementi še vedno zahtevali intervencijo in situ:
- Upravljanje svetlobnega vira kamere: namenska oprema zagotavlja infrardečo svetlobo za osvetlitev čipa za vizualizacijo kamere.
- Odpiranje ali zapiranje mehanskega zaklopa kamere: ta zaklop je del mikroskopa in mora biti med uporabo laserja zaprt.
- Spreminjanje objektiva mikroskopa: 4 različni optični objektivi so nameščeni na mehanski vrtljivi kupoli in omogočajo različne povečave mikroskopa.
Spodaj je podrobno opisano, kako smo našo preskusno napravo prilagodili za daljinsko upravljanje zaklopa in vira svetlobe. Zlasti smo želeli omejiti stroške teh prilagoditev in jih dati na voljo čim prej.
Nadzor vira svetlobe
Silicijeva podlaga polprevodnikov je polprepustna za infrardečo svetlobo, zato je z infrardečo kamero mogoče opazovati notranjo strukturo vezij. Da bi omogočili opazovanje, mora biti vezje osvetljeno z virom infrardeče svetlobe. Naš laserski mikroskop je bil dobavljen z namensko opremo za vir svetlobe, a Hayashi LA-150CE, ki ima stikalo za vklop in gumb za prilagajanje jakosti svetlobe, kot je prikazano spodaj. Ko se začne akcija laserskega testiranja, običajno izklopimo vir svetlobe, ker lahko moti komponente, še posebej, ko so vzorci razredčeni.

Ob pogledu na zadnji del opreme smo ugotovili, da sta na voljo stikalo za »daljino« in zunanji priključek. Razumeli smo, da ta svetlobni vir ponuja možnost daljinskega upravljanja prek konektorja iz prejšnjega tisočletja. Na spletu je mogoče najti malo dokumentacije, vendar smo ugotovili, da v katalogu Hayashi obstaja a Nadzorna enota LAN združljiv s tem virom svetlobe. Vendar je ta izdelek ukinjen. Tudi povezljivost LAN ni zelo priročna. V istem katalogu smo našli specifikacijo za konektor svetlobnega vira. Čeprav ni zelo podrobno, je bilo dovolj, da to preizkusimo.
Pinout daljinskega upravljalnika iz kataloga izdelkov Hayashi: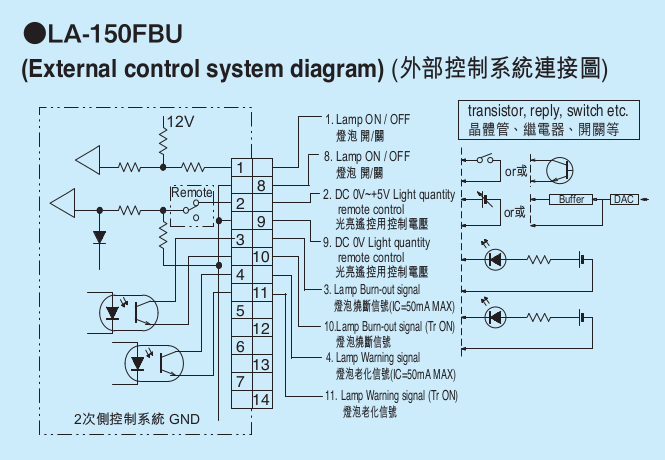
Ta vmesnik ponuja dve glavni zanimivi funkciji:
- Digitalna pina 1 in 8 lahko uporabite za vklop in izklop svetilke tako, da ju sklenete ali ne. Zatič 8 je pravzaprav tla, zato je zares pomemben le zatič 1.
- Analogni zatič 2 nadzoruje jakost svetlobe s signalom v razponu od 0 V (najmanjša jakost) do 5 V (največja jakost). Ko je oddaljeni način omogočen, se potenciometer na sprednji plošči zaobide in intenzivnost svetlobe neposredno nadzoruje ta zatič.
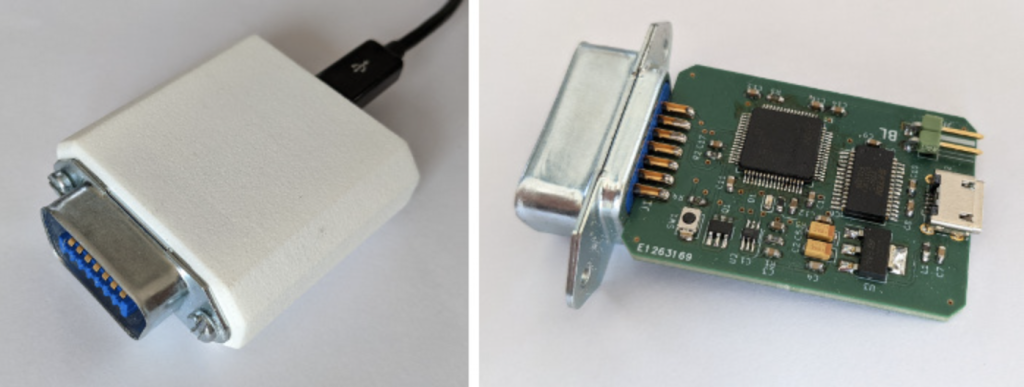
Odločili smo se, da bomo zgradili lastno iz nič Daljinski upravljalnik Hayashi Light z uporabo naslednjih delov:
- Mikrokrmilnik STM32 za gostovanje kode vdelane aplikacije,
- FT232 USB-serijski pretvornik, ki omogoča krmiljenje ključa iz USB-ja,
- Digitalno-analogni pretvornik AD5621B za generiranje analognega signala od 0 do 5 V za nadzor jakosti svetlobe.
PCB smo zasnovali z uporabo KiCad. Če sem iskren, je ta zasnova morda nekoliko prevelika: mikrokrmilnik je prevelik za trenutne potrebe in FT232 bo morda odstranjen, saj imajo naprave STM32 že zmožnosti USB, za ceno časa za razvoj programske opreme. Naš cilj je bil narediti hitro in umazano ter ponovno uporabiti nekaj naših že oblikovanih shem.
Za zabavo in ker verjamemo, da je to zelo obetaven jezik, smo razvili vdelano programsko opremo mikrokrmilnika v Rustu.
Končno smo oblikovali preprosto plastično ohišje z uporabo FreeCAD, in ga natisnil z kiparjenje.
Nepričakovano je bil najtežji del tega projekta identificirati konektor (referenca 5710140 od Amphenol za moško stran) in ga tudi kupiti, saj je zastarel in ga številni dobavitelji ne prodajajo več. Iskalnik dobaviteljev delov Octopart lahko pomaga.
Vse sheme in projektne datoteke so na voljo na našem GitHub repozitorij.
Upravljanje zaklopa fotoaparata
V mikroskopu si laserski žarek in kamera delita isto optično pot. Ko laser snema, delček svetlobe odbije silicij in zadene kamero. Da preprečite poškodbe senzorja, ki lahko dolgoročno povzročijo mrtve slikovne pike, je mogoče zapreti optično mehanski zaklop pred kamero. Zapiralo je ročno in zahteva malo ali nič sile za aktiviranje.
Za daljinsko upravljanje smo kupili majhen koračni motor in a Krmilnik koračnih motorjev TIC T834 podjetja Polulu. Razvili in natisnili smo 3D zobnike in telo za montažo na mikroskop, da z motorjem premikamo zaklop.
TIC T834 potrebuje vir energije za zagotavljanje energije motorju, a ker naš motor ne črpa veliko toka, smo napajalnik USB T834 kratko priklopili, da napajamo tudi motor. Krmilniki TIC so zelo enostavni za nastavitev in uporabo, dobro so dokumentirani in vzeli smo zelo malo časa za krmiljenje motorja z našimi programskimi orodji. Razvili smo majhen razred krmilnika v Pythonu, ki je zdaj integriran v naš pystages knjižnica.
Krmilniki koračnih motorjev morajo ugotoviti trenutni položaj motorja, ko je vklopljen. To se naredi s postopkom inicializacije, kjer se bo motor vrtel, dokler kontaktno stikalo ne sporoči krmilniku, da je motor v ničelnem položaju. Uporabili smo preprosto stikalo, neposredno povezano s T834, ki ima to funkcijo vgrajeno.
3D del telesa, ki smo ga natisnili, ni bil zelo natančen in obe prestavi sprva nista delovali pravilno. S toploto smo lahko rahlo upognili plastični del, da bi popravili režo med zobniki. Po nekaj prilagoditvah nam je uspelo na daljavo popolno odpreti in zapreti zaklop kamere!
Mehanska zasnova je na voljo pri nas GitHub repozitorij.
Končne misli
Integracija nadzora svetlobnega vira in zaklopa kamere nam je omogočila, da smo na daljavo izvajali številne akcije laserskega testiranja. Prav tako je bolj priročno kot prej, saj se zapiranje lopute in ugašanje luči zdaj lahko izvede samodejno ob vklopu laserja, medtem ko je bilo prej potrebno fizično posredovanje človeka in se je zlahka pozabilo.
Kar zadeva krmiljenje ciljne kupole, že obstajajo motorizirane kupole, ki pa so žal precej drage in jih bo morda težko zamenjati. Zaenkrat nismo našli enostavne in poceni rešitve. Vrtenje kupole z zunanjim motorjem je težko, zlasti zato, ker obstaja vzmet, ki zaklene kupolo na mestu, ko je objektiv poravnan z mikroskopom. Tudi teža, ki jo lahko dodamo motoriziranemu odru, je omejena. To je trenutno še odprto vprašanje, vendar ne preprečuje dela na daljavo, omejeni smo le na izbrano povečavo.
Nazadnje, zamenjava vzorca, ko je pokvarjen, še vedno zahteva dostop do laboratorija. Na srečo se to ne zgodi prepogosto. Sčasoma lahko multipleksiramo veliko vezij na eni hčerinski plošči, tako da lahko zažgemo nekaj naprav, preden jih je treba fizično zamenjati, vendar nismo razvili takšne rešitve.

- Distribucija vsebine in PR s pomočjo SEO. Okrepite se še danes.
- PlatoAiStream. Podatkovna inteligenca Web3. Razširjeno znanje. Dostopite tukaj.
- Kovanje prihodnosti z Adryenn Ashley. Dostopite tukaj.
- Kupujte in prodajajte delnice podjetij pred IPO s PREIPO®. Dostopite tukaj.
- vir: https://www.ledger.com/blog/laser-improvements
- :ima
- : je
- :ne
- :kje
- 1
- 14
- 24
- 3d
- 8
- a
- Sposobna
- dostop
- natančna
- čez
- dejansko
- Prilagoditve
- dodajte
- Popravki
- po
- poravnano
- vsi
- omogočajo
- omogoča
- že
- Prav tako
- an
- in
- kaj
- več
- uporaba
- Arhitektura
- SE
- AS
- At
- samodejno
- Na voljo
- pasovna širina
- BE
- Širina
- ker
- pred
- Verjemite
- spodaj
- med
- Big
- Bit
- telo
- Kupil
- Broken
- izgradnjo
- vgrajeno
- gorijo
- vendar
- by
- kamera
- Akcija
- Kampanje
- CAN
- Zmogljivosti
- Katalog
- čip
- razred
- Zapri
- zaprto
- zapiranje
- Koda
- združljiv
- deli
- povezane
- povezava
- Povezovanje
- kontakt
- nadzor
- nadzorom
- krmilnik
- nadzor
- Nadzor
- Priročen
- popravi
- strošek
- bi
- Trenutna
- po meri
- meri
- mrtva
- deliti
- odločil
- namenjen
- privzeto
- Oblikovanje
- zasnovan
- podrobno
- Razvoj
- razvili
- Razvoj
- naprava
- naprave
- DID
- drugačen
- težko
- neposredno
- Dokumentacija
- ne
- opravljeno
- navzdol
- pripravi
- med
- enostavno
- lahka
- elementi
- vgrajeni
- omogočena
- energija
- izboljšave
- dovolj
- oprema
- opremljena
- zlasti
- sčasoma
- obstajajo
- obstaja
- drago
- Poskusi
- zunanja
- soočen
- napake
- Feature
- Lastnosti
- Nekaj
- datoteke
- končno
- Najdi
- prva
- prvič
- Osredotočite
- po
- za
- moč
- pozabljen
- Na srečo
- je pokazala,
- ulomek
- iz
- spredaj
- zabava
- vrzel
- generacija
- Cilj
- dobro
- zelo
- Igrišče
- se zgodi
- Trdi
- Imajo
- pomoč
- hit
- gostitelj
- Kako
- Vendar
- HTTPS
- človeškega
- identificirati
- identifikacijo
- slika
- in
- integrirana
- Zanimivo
- vmesnik
- moti
- notranji
- Internet
- internetna povezava
- intervencije
- vprašanje
- Vprašanja
- IT
- samo
- lab
- jezik
- laser
- Latenca
- težave z zakasnitvijo
- Ledger
- Knjižnica
- light
- LIMIT
- Limited
- linux
- malo
- v živo
- Ključavnice
- Long
- Sklop
- nizkimi stroški
- je
- Glavne
- Znamka
- Izdelava
- Navodilo
- več
- max širine
- največja
- Maj ..
- mehanska
- Mikroskop
- Millennium
- minimalna
- način
- Trenutek
- več
- Najbolj
- Motor
- premikanje
- premikanje
- morajo
- Nimate
- potrebujejo
- št
- zdaj
- Cilj
- Cilji
- opazujejo
- zastarela
- of
- off
- Ponudbe
- pogosto
- on
- samo
- odprite
- deluje
- operacijski sistem
- Možnost
- or
- Da
- naši
- ven
- Pandemija
- plošča
- del
- zlasti
- deli
- preteklosti
- pot
- fizično
- zatiči
- Kraj
- plastike
- platforma
- platon
- Platonova podatkovna inteligenca
- PlatoData
- Stališče
- mogoče
- Prispevek
- moč
- Napajanje
- poganja
- preprečiti
- Izdelek
- Izdelki
- Projekt
- obetaven
- zagotavljajo
- če
- zagotavlja
- nakup
- Python
- Hitri
- hitro
- obsegu
- res
- zmanjšuje
- odsevalo
- pomembno
- daljinsko
- Odstranjeno
- zamenjajte
- zamenjava
- obvezna
- zahteva
- povzroči
- ponovna
- Run
- Rust
- Enako
- Iskalnik
- izbran
- Polprevodniki
- nastavitev
- Oblikujte
- Delite s prijatelji, znanci, družino in partnerji :-)
- pošiljajo
- streljanje
- Kratke Hlače
- Kratkega
- Kratek
- strani
- Signal
- Silicij
- Enostavno
- saj
- sam
- majhna
- So
- Software
- Razvoj programske opreme
- prodaja
- Rešitev
- nekaj
- Kmalu
- vir
- specifikacija
- Spin
- pomlad
- Stage
- začel
- postaja
- Še vedno
- STM32
- pretakanje
- Struktura
- taka
- dobavitelji
- dobavi
- Preklop
- sistem
- ciljno
- pove
- Test
- Testiranje
- kot
- da
- O
- Njih
- Tukaj.
- zato
- jih
- ta
- tisti,
- čeprav?
- skozi
- čas
- do
- tudi
- vzel
- orodja
- poskusite
- Obrnjen
- Obračalni
- dva
- pod
- razumel
- na žalost
- dokler
- us
- usb
- uporaba
- Rabljeni
- uporabo
- navadno
- zelo
- vizualizacija
- hotel
- je
- we
- web
- teža
- Dobro
- so bili
- kdaj
- ki
- bo
- z
- deluje
- deluje na daljavo
- še
- jo
- zefirnet
- nič