29 мая 2023 г. (Новости Наноуэрк) Исследователи из факультета механических наук и биоинженерии Университета Осаки изобрели новый вид шагающего робота, который использует преимущества динамической нестабильности для навигации. Изменяя гибкость муфт, робота можно заставить поворачиваться без необходимости использования сложных вычислительных систем управления. Эта работа может способствовать созданию роботов-спасателей, способных преодолевать неровную местность. Большинство животных на Земле развили надежную систему передвижения с использованием ног, которая обеспечивает им высокую степень мобильности в широком диапазоне сред. К некоторому разочарованию, инженеры, пытавшиеся воспроизвести этот подход, часто обнаруживали, что роботы с ногами на удивление хрупкие. Поломка даже одной ноги из-за повторяющегося стресса может серьезно ограничить способность этих роботов функционировать. Кроме того, управление большим количеством соединений, позволяющее роботу преодолевать сложные условия, требует большой мощности компьютера. Усовершенствования этой конструкции были бы чрезвычайно полезны для создания автономных или полуавтономных роботов, которые могли бы действовать как исследовательские или спасательные машины и проникать в опасные зоны.
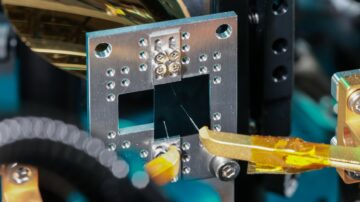
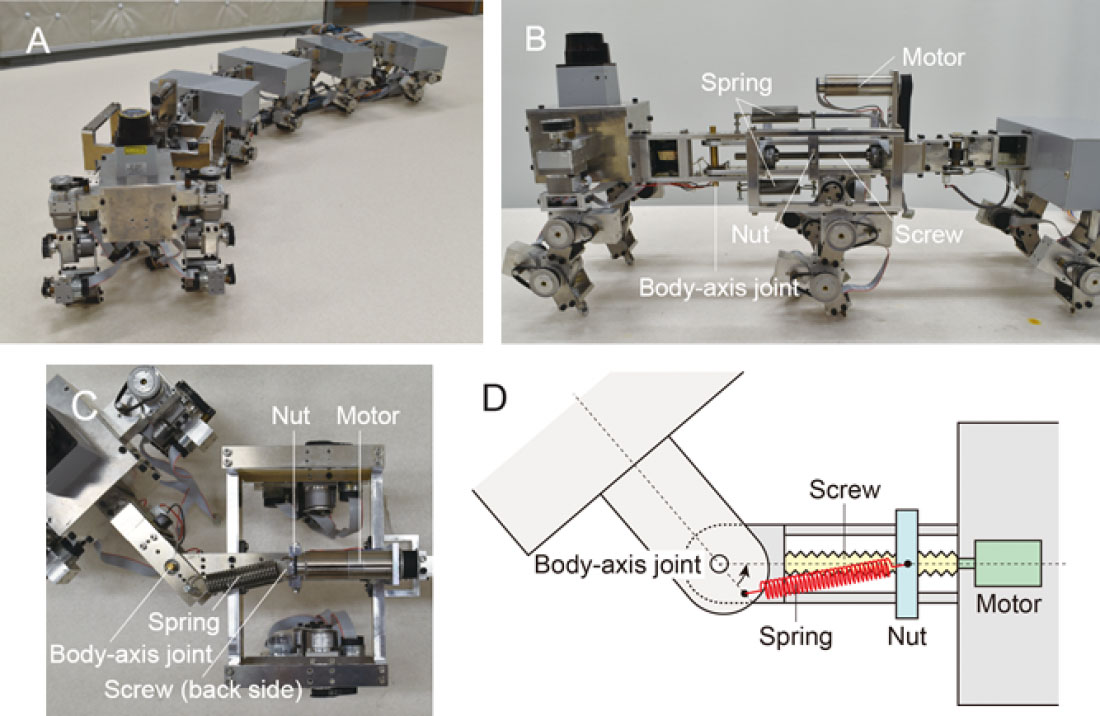 Робот-многоножка (A) и механизм переменной гибкости оси тела (B. Вид спереди, C. Вид сверху, D. Схема вида сверху). (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Теперь исследователи из Университета Осаки разработали биомиметического робота-многонога, который использует естественную нестабильность и может превращать прямую ходьбу в движение по кривой. В исследовании, опубликованном недавно в Мягкая робототехника («Маневренное и эффективное передвижение робота-многоножки с переменной гибкостью оси тела за счет нестабильности и бифуркации»), исследователи из Университета Осаки описывают своего робота, который состоит из шести сегментов (с двумя ногами, соединенными с каждым сегментом) и гибких суставов. С помощью регулируемого винта гибкость муфт можно изменять с помощью двигателей во время ходьбы. Исследователи показали, что увеличение гибкости суставов привело к ситуации, называемой «бифуркация вил», при которой прямолинейная ходьба становится нестабильной. Вместо этого робот переходит к ходьбе по изогнутой траектории либо вправо, либо влево. Обычно инженеры стараются избежать нестабильности. Однако их контролируемое использование может обеспечить эффективную маневренность. «Нас вдохновила способность некоторых чрезвычайно проворных насекомых, которая позволяет им контролировать динамическую нестабильность собственного движения, вызывая быстрые изменения движений», — говорит Шинья Аой, автор исследования. Поскольку этот подход не управляет движением оси тела напрямую, а скорее контролирует гибкость, он может значительно снизить как вычислительную сложность, так и затраты энергии.
Робот-многоножка (A) и механизм переменной гибкости оси тела (B. Вид спереди, C. Вид сверху, D. Схема вида сверху). (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Теперь исследователи из Университета Осаки разработали биомиметического робота-многонога, который использует естественную нестабильность и может превращать прямую ходьбу в движение по кривой. В исследовании, опубликованном недавно в Мягкая робототехника («Маневренное и эффективное передвижение робота-многоножки с переменной гибкостью оси тела за счет нестабильности и бифуркации»), исследователи из Университета Осаки описывают своего робота, который состоит из шести сегментов (с двумя ногами, соединенными с каждым сегментом) и гибких суставов. С помощью регулируемого винта гибкость муфт можно изменять с помощью двигателей во время ходьбы. Исследователи показали, что увеличение гибкости суставов привело к ситуации, называемой «бифуркация вил», при которой прямолинейная ходьба становится нестабильной. Вместо этого робот переходит к ходьбе по изогнутой траектории либо вправо, либо влево. Обычно инженеры стараются избежать нестабильности. Однако их контролируемое использование может обеспечить эффективную маневренность. «Нас вдохновила способность некоторых чрезвычайно проворных насекомых, которая позволяет им контролировать динамическую нестабильность собственного движения, вызывая быстрые изменения движений», — говорит Шинья Аой, автор исследования. Поскольку этот подход не управляет движением оси тела напрямую, а скорее контролирует гибкость, он может значительно снизить как вычислительную сложность, так и затраты энергии.
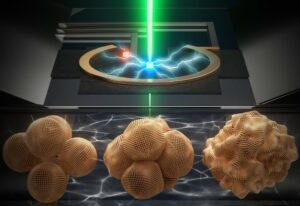
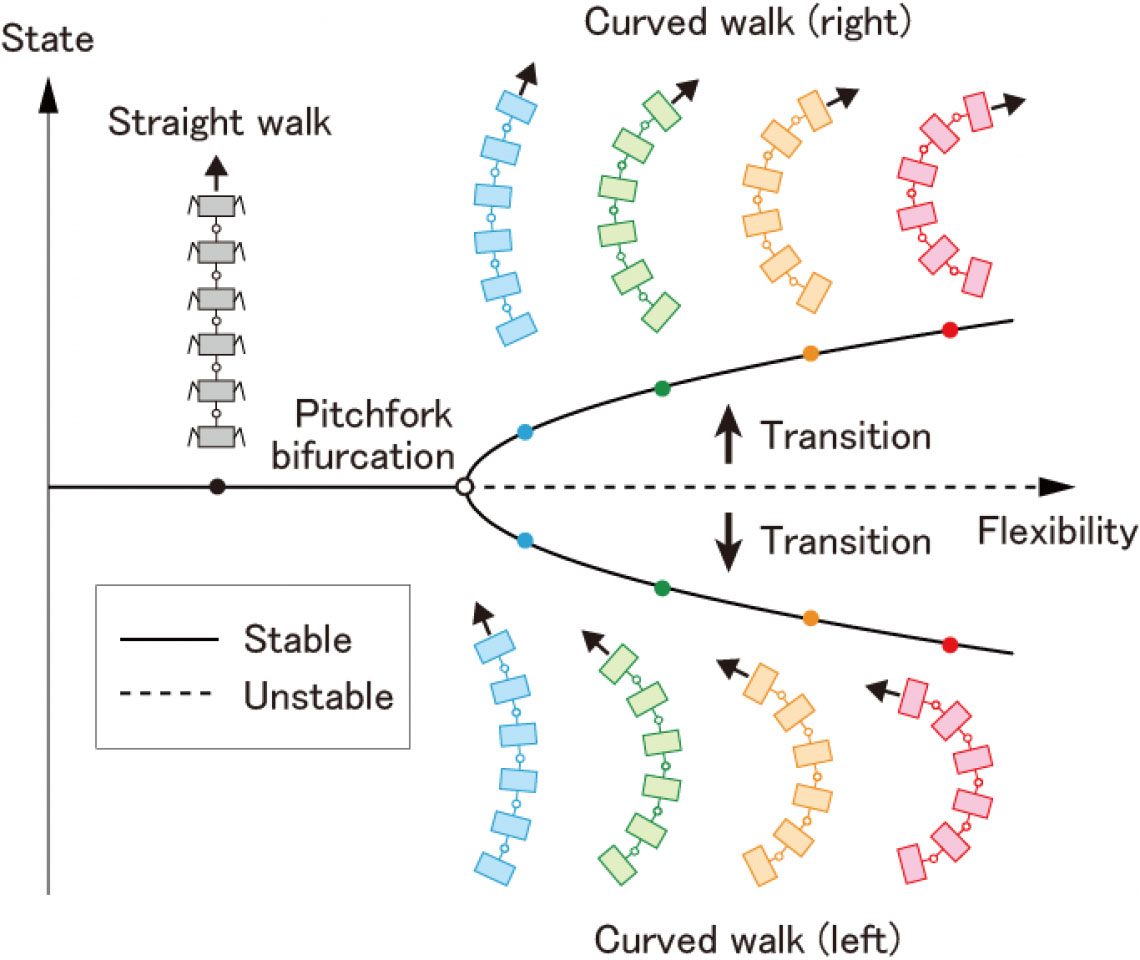 Стабильные и нестабильные модели ходьбы в зависимости от гибкости оси тела. (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Команда проверила способность робота достигать определенных мест и обнаружила, что он может перемещаться, выбирая изогнутые пути к целям. «Мы можем предвидеть применение в самых разных сценариях, таких как поиск и спасение, работа в опасных условиях или исследование других планет», — говорит Мау Адачи, другой автор исследования. Будущие версии могут включать дополнительные сегменты и механизмы управления.
Стабильные и нестабильные модели ходьбы в зависимости от гибкости оси тела. (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Команда проверила способность робота достигать определенных мест и обнаружила, что он может перемещаться, выбирая изогнутые пути к целям. «Мы можем предвидеть применение в самых разных сценариях, таких как поиск и спасение, работа в опасных условиях или исследование других планет», — говорит Мау Адачи, другой автор исследования. Будущие версии могут включать дополнительные сегменты и механизмы управления.
Робот-многоножка (A) и механизм переменной гибкости оси тела (B. Вид спереди, C. Вид сверху, D. Схема вида сверху). (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Теперь исследователи из Университета Осаки разработали биомиметического робота-многонога, который использует естественную нестабильность и может превращать прямую ходьбу в движение по кривой. В исследовании, опубликованном недавно в Мягкая робототехника («Маневренное и эффективное передвижение робота-многоножки с переменной гибкостью оси тела за счет нестабильности и бифуркации»), исследователи из Университета Осаки описывают своего робота, который состоит из шести сегментов (с двумя ногами, соединенными с каждым сегментом) и гибких суставов. С помощью регулируемого винта гибкость муфт можно изменять с помощью двигателей во время ходьбы. Исследователи показали, что увеличение гибкости суставов привело к ситуации, называемой «бифуркация вил», при которой прямолинейная ходьба становится нестабильной. Вместо этого робот переходит к ходьбе по изогнутой траектории либо вправо, либо влево. Обычно инженеры стараются избежать нестабильности. Однако их контролируемое использование может обеспечить эффективную маневренность. «Нас вдохновила способность некоторых чрезвычайно проворных насекомых, которая позволяет им контролировать динамическую нестабильность собственного движения, вызывая быстрые изменения движений», — говорит Шинья Аой, автор исследования. Поскольку этот подход не управляет движением оси тела напрямую, а скорее контролирует гибкость, он может значительно снизить как вычислительную сложность, так и затраты энергии.
Стабильные и нестабильные модели ходьбы в зависимости от гибкости оси тела. (Изображение: CC BY-NC, 2023, Aoi et al., Soft Robotics) Команда проверила способность робота достигать определенных мест и обнаружила, что он может перемещаться, выбирая изогнутые пути к целям. «Мы можем предвидеть применение в самых разных сценариях, таких как поиск и спасение, работа в опасных условиях или исследование других планет», — говорит Мау Адачи, другой автор исследования. Будущие версии могут включать дополнительные сегменты и механизмы управления.
- SEO-контент и PR-распределение. Получите усиление сегодня.
- ПлатонАйСтрим. Анализ данных Web3. Расширение знаний. Доступ здесь.
- Чеканка будущего с Эдриенн Эшли. Доступ здесь.
- Покупайте и продавайте акции компаний PREIPO® с помощью PREIPO®. Доступ здесь.
- Источник: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :нет
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- способность
- в состоянии
- Действие (Act):
- дополнение
- дополнительный
- регулируемый
- плюс
- проворный
- AL
- позволяет
- an
- и
- животные
- Другой
- Приложения
- подхода
- МЫ
- области
- AS
- помощь
- At
- попытка
- автор
- автономный
- избежать
- Ось
- BE
- , так как:
- становится
- тело
- изоферменты печени
- Breakdown
- Строительство
- но
- by
- под названием
- CAN
- Центр
- определенный
- изменения
- изменения
- комплекс
- сложность
- компьютер
- мощность компьютера
- подключенный
- контроль
- контроль
- управление
- контрольная
- конвертировать
- может
- Создающий
- создание
- опасно
- Время
- Степень
- Кафедра
- в зависимости
- описывать
- Проект
- развитый
- непосредственно
- приносит
- два
- в течение
- динамический
- Е & Т
- каждый
- земля
- эффективный
- или
- включить
- энергетика
- Инженеры
- Enter
- средах
- Даже
- эволюционировали
- исследование
- чрезвычайно
- Трансформируемость
- гибкого
- Что касается
- найденный
- от
- передний
- функция
- будущее
- Go
- значительно
- Есть
- High
- Однако
- HTTPS
- изображение
- улучшение
- in
- включают
- повышение
- вдохновленный
- нестабильность
- вместо
- в
- Изобретенный
- Следователи
- IT
- JPG
- Вид
- большой
- привело
- оставил
- ноги
- ОГРАНИЧЕНИЯ
- места
- серия
- сделанный
- Создание
- Май..
- механический
- механизм
- механизмы
- средняя
- мобильность
- модифицировало
- самых
- движение
- Двигатели
- движение
- натуральный
- Откройте
- Необходимость
- Новые
- нормально
- сейчас
- номер
- of
- .
- on
- ONE
- or
- Другое
- за
- собственный
- шаблон
- паттеранами
- Планеты
- Платон
- Платон Интеллектуальные данные
- ПлатонДанные
- мощностью
- приводит
- опубликованный
- САЙТ
- ассортимент
- скорее
- достигать
- недавно
- уменьшить
- повторный
- Требования
- требуется
- спасать
- исследователи
- правую
- робот
- робототехника
- Роботы
- надежный
- говорит
- Сценарии
- Наука
- Поиск
- сегмент
- сегментами
- сильно
- показал
- ситуация
- ШЕСТЬ
- So
- мягкая
- в некотором роде
- конкретный
- стабильный
- прямой
- стресс
- Кабинет
- такие
- система
- системы
- принимает
- с
- направлена против
- команда
- который
- Ассоциация
- их
- Их
- Эти
- этой
- в
- топ
- к
- переходы
- стараться
- ОЧЕРЕДЬ
- два
- Университет
- использование
- через
- разнообразие
- Транспорт
- с помощью
- Вид
- ходьба
- ЧТО Ж
- были
- который
- КТО
- широкий
- Широкий диапазон
- без
- Работа
- работает
- бы
- зефирнет
Больше от нанотехнология


Интеграция роботов на основе оригами, которые чувствуют, принимают решения и реагируют
Исходный узел: 2565107
Отметка времени: 4 Апрель, 2023
Двумерные/квазидвумерные гетероструктуры на основе перовскита: конструкция, свойства и применение
Исходный узел: 1938788
Отметка времени: 3 февраля, 2023

Обнаружен высокоэффективный процесс разделения воды
Исходный узел: 1949683
Отметка времени: 10 февраля, 2023
Исследователи подробно рассказали о невиданных ранее свойствах семейства сверхпроводящих металлов Кагомэ.
Исходный узел: 1952937
Отметка времени: 11 февраля, 2023
Интегральные фотонные схемы могут помочь закрыть «терагерцовую щель»
Исходный узел: 1899339
Отметка времени: 14 января, 2023

Выбросы углерода от удобрений могут сократиться на 80% к 2050 году
Исходный узел: 1951214
Отметка времени: 11 февраля, 2023
Новые сегнетоэлектрики для более эффективной микроэлектроники
Исходный узел: 2716345
Отметка времени: Июнь 9, 2023
Как рекордный медный нанокатализатор превращает CO2 в жидкое топливо
Исходный узел: 1961058
Отметка времени: 16 февраля, 2023
Исследователи напечатали функциональную ткань человеческого мозга на 3D-принтере
Исходный узел: 3093799
Отметка времени: 2 февраля, 2024
Разработка технологий для снижения стоимости производства зеленого водорода
Исходный узел: 2700260
Отметка времени: Июнь 2, 2023
Раскрытие секретов вращения с помощью зондов высоких гармоник
Исходный узел: 2969974
Отметка времени: 10 ноября, 2023