29年2023月XNUMX日(Nanowerkニュース) 大阪大学機械科学・生物工学部の研究者らは、動的不安定性を利用して移動する新しい種類の歩行ロボットを発明した。カップリングの柔軟性を変更することで、複雑な計算制御システムを必要とせずにロボットを回転させることができます。この研究は、不整地を移動できる救助ロボットの作成に役立つ可能性があります。地球上のほとんどの動物は、脚を使った堅牢な移動システムを進化させ、広範囲の環境で高度な移動性を実現しています。やや残念なことに、このアプローチを再現しようとしたエンジニアは、脚付きロボットが驚くほど壊れやすいことにしばしば気づきました。繰り返しのストレスにより片足でも故障すると、これらのロボットの機能が大幅に制限される可能性があります。さらに、ロボットが複雑な環境を横断できるように多数の関節を制御するには、多くのコンピューター能力が必要です。この設計の改善は、探索車両や救助車両として機能し、危険なエリアに進入できる自律型または半自律型ロボットを構築するのに非常に役立ちます。
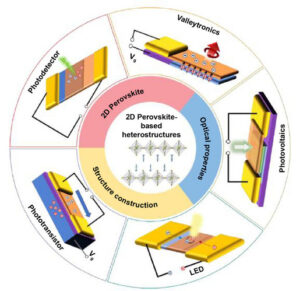
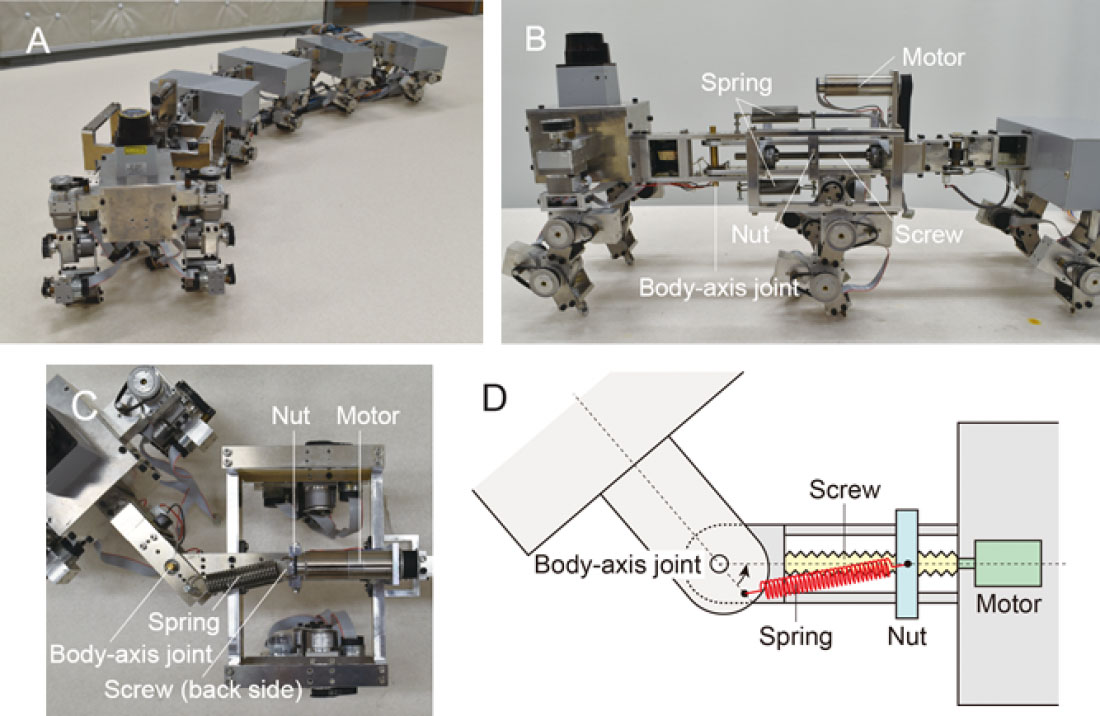 Myriapod ロボット (A) と体軸可変機構 (B. 正面図、C. 上面図、D. 上面図の概略図)。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 現在、大阪大学の研究者らは、自然の不安定性を利用して直線歩行を曲線運動に変換できる生体模倣「ミリアポッド」ロボットを開発した。最近発表された研究では、 ソフトロボティクス (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)、大阪大学の研究者は、6 つのセグメント(各セグメントに 2 本の脚が接続されている)と柔軟な関節で構成されるロボットについて説明しています。調整可能なネジを使用すると、歩行動作中にモーターによってカップリングの柔軟性を変更できます。研究者らは、関節の柔軟性を高めると、まっすぐに歩くことが不安定になる「熊手分岐」と呼ばれる状況を引き起こすことを示した。代わりに、ロボットは右または左への曲線パターンでの歩行に移行します。通常、エンジニアは不安定性が生じることを避けようとします。ただし、それらを制御して使用すると、効率的な操作性が可能になります。 「私たちは、特定の非常に機敏な昆虫が、自らの動きの動的な不安定性を制御して素早い動きの変化を引き起こす能力にインスピレーションを受けました」と研究論文の著者である青井真也氏は語る。このアプローチは体の軸の動きを直接制御するのではなく、柔軟性を制御するため、計算の複雑さとエネルギー要件の両方を大幅に削減できます。
Myriapod ロボット (A) と体軸可変機構 (B. 正面図、C. 上面図、D. 上面図の概略図)。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 現在、大阪大学の研究者らは、自然の不安定性を利用して直線歩行を曲線運動に変換できる生体模倣「ミリアポッド」ロボットを開発した。最近発表された研究では、 ソフトロボティクス (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)、大阪大学の研究者は、6 つのセグメント(各セグメントに 2 本の脚が接続されている)と柔軟な関節で構成されるロボットについて説明しています。調整可能なネジを使用すると、歩行動作中にモーターによってカップリングの柔軟性を変更できます。研究者らは、関節の柔軟性を高めると、まっすぐに歩くことが不安定になる「熊手分岐」と呼ばれる状況を引き起こすことを示した。代わりに、ロボットは右または左への曲線パターンでの歩行に移行します。通常、エンジニアは不安定性が生じることを避けようとします。ただし、それらを制御して使用すると、効率的な操作性が可能になります。 「私たちは、特定の非常に機敏な昆虫が、自らの動きの動的な不安定性を制御して素早い動きの変化を引き起こす能力にインスピレーションを受けました」と研究論文の著者である青井真也氏は語る。このアプローチは体の軸の動きを直接制御するのではなく、柔軟性を制御するため、計算の複雑さとエネルギー要件の両方を大幅に削減できます。
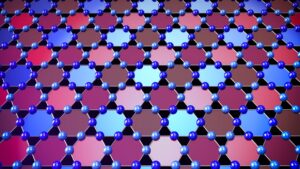
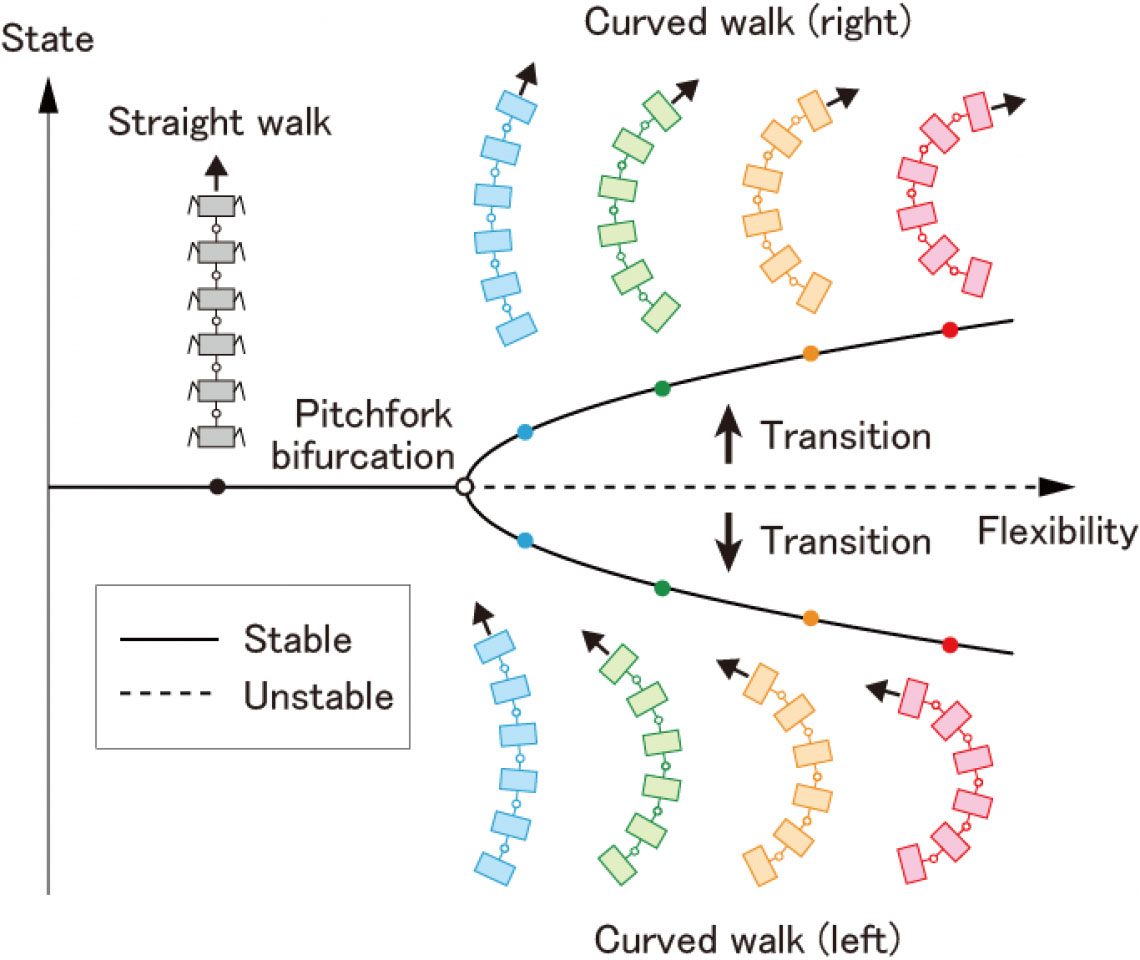 体軸の柔軟性によって、安定した歩行パターンと不安定な歩行パターンが変化します。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 研究チームは、ロボットが特定の場所に到達する能力をテストし、目標に向かって曲がった経路をたどって移動できることを発見しました。 「捜索救助、危険な環境での作業、他の惑星での探査など、さまざまなシナリオでの応用が予想されます」と、もう一人の研究著者であるアダチマウ氏は言う。将来のバージョンには追加のセグメントと制御メカニズムが含まれる可能性があります。
体軸の柔軟性によって、安定した歩行パターンと不安定な歩行パターンが変化します。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 研究チームは、ロボットが特定の場所に到達する能力をテストし、目標に向かって曲がった経路をたどって移動できることを発見しました。 「捜索救助、危険な環境での作業、他の惑星での探査など、さまざまなシナリオでの応用が予想されます」と、もう一人の研究著者であるアダチマウ氏は言う。将来のバージョンには追加のセグメントと制御メカニズムが含まれる可能性があります。
Myriapod ロボット (A) と体軸可変機構 (B. 正面図、C. 上面図、D. 上面図の概略図)。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 現在、大阪大学の研究者らは、自然の不安定性を利用して直線歩行を曲線運動に変換できる生体模倣「ミリアポッド」ロボットを開発した。最近発表された研究では、 ソフトロボティクス (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)、大阪大学の研究者は、6 つのセグメント(各セグメントに 2 本の脚が接続されている)と柔軟な関節で構成されるロボットについて説明しています。調整可能なネジを使用すると、歩行動作中にモーターによってカップリングの柔軟性を変更できます。研究者らは、関節の柔軟性を高めると、まっすぐに歩くことが不安定になる「熊手分岐」と呼ばれる状況を引き起こすことを示した。代わりに、ロボットは右または左への曲線パターンでの歩行に移行します。通常、エンジニアは不安定性が生じることを避けようとします。ただし、それらを制御して使用すると、効率的な操作性が可能になります。 「私たちは、特定の非常に機敏な昆虫が、自らの動きの動的な不安定性を制御して素早い動きの変化を引き起こす能力にインスピレーションを受けました」と研究論文の著者である青井真也氏は語る。このアプローチは体の軸の動きを直接制御するのではなく、柔軟性を制御するため、計算の複雑さとエネルギー要件の両方を大幅に削減できます。
体軸の柔軟性によって、安定した歩行パターンと不安定な歩行パターンが変化します。 (画像: CC BY-NC、2023、Aoi et al.、Soft Robotics) 研究チームは、ロボットが特定の場所に到達する能力をテストし、目標に向かって曲がった経路をたどって移動できることを発見しました。 「捜索救助、危険な環境での作業、他の惑星での探査など、さまざまなシナリオでの応用が予想されます」と、もう一人の研究著者であるアダチマウ氏は言う。将来のバージョンには追加のセグメントと制御メカニズムが含まれる可能性があります。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- プラトアイストリーム。 Web3 データ インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- 未来を鋳造する w エイドリエン・アシュリー。 こちらからアクセスしてください。
- PREIPO® を使用して PRE-IPO 企業の株式を売買します。 こちらからアクセスしてください。
- 情報源: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :not
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- 能力
- できる
- 行為
- 添加
- NEW
- 調節可能
- 利点
- 使い勝手のいい
- AL
- ことができます
- an
- &
- 動物
- 別の
- アプローチ
- です
- エリア
- AS
- アシスト
- At
- 試みた
- 著者
- 自律的
- 避ける
- 軸
- BE
- なぜなら
- になる
- ボディ
- 両言語で
- 内訳
- 建物
- 焙煎が極度に未発達や過発達のコーヒーにて、クロロゲン酸の味わいへの影響は強くなり、金属を思わせる味わいと乾いたマウスフィールを感じさせます。
- by
- 呼ばれます
- 缶
- センター
- 一定
- 変更
- 変化
- 複雑な
- 複雑さ
- コンピュータ
- コンピュータ電源
- 交流
- コントロール
- 制御
- 制御
- controls
- 変換
- 可能性
- 作成
- 創造
- 危険な
- 日付
- 度
- 部門
- によっては
- 説明する
- 設計
- 発展した
- 直接に
- ありません
- 原因
- 間に
- ダイナミック
- E&T
- 各
- EARTH
- 効率的な
- どちら
- enable
- エネルギー
- エンジニア
- 入力します
- 環境
- さらに
- 進化
- 探査
- 非常に
- 柔軟性
- フレキシブル
- 発見
- から
- フロント
- function
- 未来
- Go
- 大いに
- 持ってる
- ハイ
- しかしながら
- HTTPS
- 画像
- 改善
- in
- include
- の増加
- インスピレーションある
- 不安定
- を取得する必要がある者
- に
- 発明された
- 研究者
- IT
- JPG
- 種類
- 大
- ツェッペリン
- 左
- 脚
- LIMIT
- 場所
- たくさん
- 製
- 作成
- 五月..
- 機械的な
- メカニズム
- メカニズム
- 真ん中
- モビリティ
- 修正されました
- 最も
- モーション
- モーター
- 運動
- ナチュラル
- ナビゲート
- 必要
- 新作
- 通常は
- 今
- 数
- of
- 頻繁に
- on
- ONE
- or
- その他
- が
- 自分の
- パターン
- パターン
- 惑星
- プラトン
- プラトンデータインテリジェンス
- プラトデータ
- 電力
- は、大阪で
- 公表
- クイック
- 範囲
- むしろ
- リーチ
- 最近
- 減らします
- 繰り返される
- 要件
- 必要
- レスキュー用機材
- 研究者
- 右
- ロボット
- ロボット工学
- ロボット
- 堅牢な
- 言う
- シナリオ
- 科学
- を検索
- セグメント
- セグメント
- ひどく
- 示されました
- 状況
- SIX
- So
- ソフト
- 幾分
- 特定の
- 安定した
- ストレート
- ストレス
- 勉強
- そのような
- システム
- 取り
- 取得
- ターゲット
- チーム
- それ
- アプリ環境に合わせて
- それら
- ボーマン
- この
- 〜へ
- top
- に向かって
- 遷移
- 試します
- 順番
- 2
- 大学
- つかいます
- 多様
- 車
- 、
- 詳しく見る
- ウォーキング
- WELL
- した
- which
- 誰
- ワイド
- 広い範囲
- 無し
- 仕事
- ワーキング
- でしょう
- ゼファーネット