この短い投稿では、実験をリモートで実行できるようにするために行ったレーザー ステーションの機能強化について説明します。
セットアップの問題
当社のレーザー障害注入プラットフォームは、レーザー光源の焦点をテスト対象のデバイスに合わせるために使用される顕微鏡で構成されています。 赤外線カメラを搭載しており、ターゲットチップの内部構造を観察し、レーザービームの形状を調整します。 幸いなことに、これには電動ステージが装備されており、カスタム ソフトウェア アプリケーションからチップ全体でレーザー ビームを移動させることができます。 私たちが開発したツールはすべて Linux オペレーティング システム上で実行されるため、インターネット接続が良好であれば、SSH 接続経由でツールを使用できます。 顕微鏡カメラのライブ画像を処理する際に遅延の問題がいくつか発生しましたが、SSH 圧縮オプションをオンにすることですぐに解決しました (-C)これはデフォルトでは有効になっていないため、必要なストリーミング帯域幅が大幅に減少します。 それにもかかわらず、当時はまだ現場での介入が必要な要素がいくつかありました。
- カメラの光源の制御: 専用の装置は、カメラで視覚化するためにチップを照らす赤外線を提供します。
- 機械式カメラ シャッターの開閉: このシャッターは顕微鏡の一部であり、レーザーを使用するときは閉じる必要があります。
- 顕微鏡対物レンズの変更: 4 つの異なる光学対物レンズが機械式回転タレットに取り付けられており、異なる顕微鏡倍率が可能です。
以下に、シャッターと光源をリモート制御するためにテストベンチをカスタマイズした方法を詳しく説明します。 特に、これらの適応にかかるコストを制限し、できるだけ早く利用できるようにしたいと考えていました。
光源の制御
半導体のシリコン基板は赤外線に対して半透明なので、赤外線カメラを使えば回路の内部構造を観察することができます。 観察を可能にするためには、回路を赤外光源で照らす必要があります。 当社のレーザー顕微鏡には、専用の光源装置が同梱されています。 ハヤシ LA-150CEには、以下に示すように、電源スイッチと光の強度を調整するノブがあります。 レーザーテストキャンペーンが開始されるとき、特にサンプルが薄くなっている場合、コンポーネントに干渉する可能性があるため、通常は光源をオフにします。

機器の背面を見ると、「リモート」スイッチと外部コネクタが利用可能であることがわかりました。 私たちは、この光源が過去のミレニアムコネクタを介してリモート制御機能を提供していることを理解しました。 Web 上にはドキュメントがほとんど見つかりませんが、ハヤシのカタログに次のものが存在することを確認しました。 LANコントロールユニット この光源と互換性があります。 ただし、この商品は生産中止となっております。 また、LAN接続はあまり便利ではありません。 同じカタログに、光源のコネクタの仕様が記載されていました。 あまり詳しくありませんが、これを試してみるには十分でした。
ハヤシ製品カタログよりリモコンのピン配置: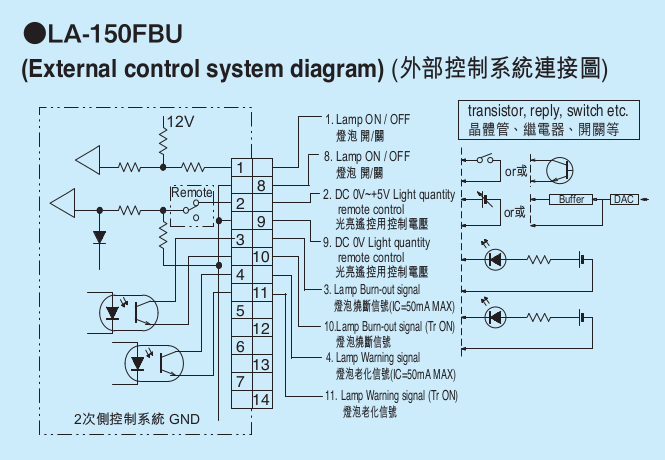
このインターフェイスは、次の XNUMX つの主要な興味深い機能を提供します。
- デジタルピン 1 と 8 は、短絡するかどうかによってランプのオンとオフを切り替えるために使用できます。 ピン 8 は実際にはグランドなので、実際に関連するのはピン 1 だけです。
- アナログ ピン 2 は、0 V (最小強度) から 5 V (最大強度) の範囲の信号で光の強度を制御します。 リモート モードが有効な場合、フロント パネルのポテンショメータはバイパスされ、光の強度はこのピンによって直接制御されます。
私たちは自分たちでゼロから構築することにしました ハヤシライトリモコン 次のパーツを使用します。
- 組み込みアプリケーション コードをホストするための STM32 マイクロコントローラー
- FT232 USB-シリアルコンバータにより、USB からドングルを制御できるようになります。
- 光の強度を制御するための5621~0Vのアナログ信号生成用のAD5Bデジタル/アナログコンバータ。
を使用して PCB を設計しました。 キカド。 正直に言うと、この設計は少し大きすぎるかもしれません。マイクロコントローラーは現在のニーズに対して大きすぎます。また、STM232 デバイスにはすでに USB 機能が搭載されているため、ソフトウェア開発時間を犠牲にして FT32 は削除される可能性があります。 私たちの目標は、それを素早く簡単に実行し、すでに設計された回路図の一部を再利用することでした。
楽しみのために、そしてこれが非常に有望な言語であると信じているため、マイクロコントローラーのファームウェアを Rust で開発しました。
私たちは最終的に、以下を使用してシンプルなプラスチック製の筐体を設計しました。 FreeCAD、そしてそれを印刷しました スカルプテオ.
予想外に、このプロジェクトで最も困難な部分は、コネクタ (オス側の Amphenol の参照番号 5710140) を特定することであり、また、それが時代遅れで多くのサプライヤーから販売されていないため、それを購入することでした。 部品サプライヤー検索エンジン オクトパート 助けることができる。
すべての回路図と設計ファイルは次のサイトから入手できます。 GitHubリポジトリ.
カメラのシャッターを制御する
顕微鏡では、レーザービームとカメラが同じ光路を共有します。 レーザーが発射されると、光の一部がシリコンで反射され、カメラに当たります。 長期間にわたってピクセルの欠落が発生する可能性があるセンサーの損傷を防ぐために、カメラの前にある光学機械シャッターを閉じることができます。 シャッターは手動で作動するため、ほとんど力を必要としません。
遠隔制御を可能にするために、小さなステッピングモーターと Polulu の TIC T834 ステッピング モーター コントローラー。 モーターでシャッターを動かすために、顕微鏡に取り付ける3Dギアとボディを開発・印刷しました。
TIC T834 はモーターにエネルギーを供給するための電源を必要としますが、モーターは多くの電流を消費しないため、T834 の USB 電源を短絡してモーターにも電力を供給しました。 TIC コントローラーはセットアップと使用が非常に簡単で、十分に文書化されており、ソフトウェア ツールからモーターを制御するのにほとんど時間はかかりませんでした。 私たちは Python で小さなコントローラー クラスを開発し、現在は ピステージ としょうかん。
ステッピング モーター コントローラーは、電源が入っているときに現在のモーターの位置を確認する必要があります。 これは、接触スイッチがコントローラーにモーターがゼロ位置にあることを通知するまでモーターが回転する初期化手順で行われます。 この機能が組み込まれた T834 に直接接続されたシンプルなスイッチを使用しました。
私たちがプリントした 3D ボディパーツはあまり正確ではなく、最初は XNUMX つのギアが正しく動作していませんでした。 熱を利用してプラスチック部品をわずかに曲げて、ギア間のギャップを修正することができました。 いくつかの調整を行った結果、リモートでカメラのシャッターを完璧に開閉することができました。
機械設計は当社で入手可能です GitHubリポジトリ.
最終的な考え
光源とカメラのシャッターの制御を統合することで、多くのレーザー テスト キャンペーンをリモートで実行できるようになりました。 また、これまでは人間の物理的な介入が必要で忘れがちであった、レーザーの点灯時にシャッターを閉めたり消灯したりする操作が自動的に行われるようになり、以前よりも便利になりました。
対物レンズタレットの制御に関しては、すでに電動タレットが存在しますが、残念ながら非常に高価であり、交換するのは難しいかもしれません。 現時点では、シンプルで低コストの解決策は見つかりませんでした。 外部モーターを使用してタレットを回転させるのは困難です。特に、対物レンズと顕微鏡の位置を合わせたときにタレットを所定の位置にロックするバネがあるためです。 また、電動ステージに追加できる重量には限界があります。 これは現時点ではまだ未解決の問題ですが、リモートでの作業が妨げられるわけではなく、選択した倍率に制限されるだけです。
最後に、サンプルが破損した場合に交換するには、依然として研究室へのアクセスが必要です。 幸いなことに、それはそれほど頻繁には起こりません。 最終的には XNUMX つのドーターボード上に多くの回路を多重化し、物理的な交換が必要になる前にいくつかのデバイスを焼き付けることができるようになるかもしれませんが、私たちはそのようなソリューションを開発していませんでした。

- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- プラトアイストリーム。 Web3 データ インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- 未来を鋳造する w エイドリエン・アシュリー。 こちらからアクセスしてください。
- PREIPO® を使用して PRE-IPO 企業の株式を売買します。 こちらからアクセスしてください。
- 情報源: https://www.ledger.com/blog/laser-improvements
- :持っている
- :は
- :not
- :どこ
- 1
- 14
- 24
- 3d
- 8
- a
- できる
- アクセス
- 正確な
- 越えて
- 実際に
- 適応
- 加えます
- 調整
- 後
- 整列した
- すべて
- 許す
- ことができます
- 既に
- また
- an
- および
- どれか
- もはや
- 申し込み
- 建築
- です
- AS
- At
- 自動的に
- 利用できます
- 帯域幅
- BE
- ビーム
- なぜなら
- 信じる
- 以下
- の間に
- ビッグ
- ビット
- ボディ
- 買った
- 壊れた
- ビルド
- 内蔵
- 焼く
- 焙煎が極度に未発達や過発達のコーヒーにて、クロロゲン酸の味わいへの影響は強くなり、金属を思わせる味わいと乾いたマウスフィールを感じさせます。
- by
- カメラ
- キャンペーン
- キャンペーン
- 缶
- 機能
- カタログ
- チップ
- class
- 閉じる
- 閉まっている
- 閉鎖
- コード
- 互換性のあります
- コンポーネント
- 交流
- 接続
- 接続性
- 接触
- コントロール
- 制御
- コントローラ
- 制御
- controls
- 便利
- 正しい
- 費用
- 可能性
- 電流プローブ
- カスタム
- カスタマイズ
- 死んだ
- 取引
- 決定しました
- 専用の
- デフォルト
- 設計
- 設計
- 詳細な
- 開発する
- 発展した
- 開発
- デバイス
- Devices
- DID
- 異なります
- 難しい
- 直接に
- ドキュメント
- ありません
- 行われ
- ダウン
- ドロー
- 間に
- 簡単に
- 簡単に
- 要素は
- 埋め込まれた
- 使用可能
- エネルギー
- 強化
- 十分な
- 装置
- 装備
- 特に
- 最終的に
- 存在する
- 存在
- 高価な
- 実験
- 外部
- 直面して
- 欠点
- 特徴
- 特徴
- 少数の
- 最後に
- もう完成させ、ワークスペースに掲示しましたか?
- 名
- 初回
- フォーカス
- フォロー中
- 強
- 忘れ
- 幸いにも
- 発見
- 分数
- から
- フロント
- 楽しいです
- ギャップ
- 世代
- 目標
- 良い
- 大いに
- 陸上
- 起こる
- ハード
- 持ってる
- 助けます
- ヒット
- host
- 認定条件
- しかしながら
- HTTPS
- 人間
- 特定され
- 識別
- 画像
- in
- 統合された
- 興味深い
- インタフェース
- 干渉する
- 内部
- インターネット
- インターネット接続
- 介入
- 問題
- 問題
- IT
- ただ
- ラボ
- 言語
- レーザー
- レイテンシ
- 遅延の問題
- 元帳
- 図書館
- 光
- LIMIT
- 限定的
- linuxの
- 少し
- ライブ
- ロック
- 長い
- たくさん
- 低コストの
- 製
- メイン
- make
- 作成
- マニュアル
- 多くの
- 最大幅
- 五月..
- 機械的な
- 顕微鏡
- 千年
- 最小
- モード
- 瞬間
- 他には?
- 最も
- モーター
- 移動する
- しなければなりません
- 必要
- 必要
- いいえ
- 今
- 客観
- 目的
- 観察する
- 廃止された
- of
- オフ
- オファー
- 頻繁に
- on
- の
- 開いた
- オペレーティング
- オペレーティングシステム
- オプション
- or
- 注文
- 私たちの
- でる
- パンデミック
- パネル
- 部
- 特定の
- 部品
- 過去
- path
- 物理的な
- ピン
- 場所
- プラスチック
- プラットフォーム
- プラトン
- プラトンデータインテリジェンス
- プラトデータ
- 位置
- 可能
- ポスト
- 電力
- 電源
- パワード
- 防ぐ
- プロダクト
- 製品
- プロジェクト
- 有望
- 提供します
- 提供
- は、大阪で
- 購入
- Python
- クイック
- すぐに
- 測距
- 本当に
- 軽減
- 反映
- 関連した
- リモート
- 削除済み
- replace
- 置換
- の提出が必要です
- 必要
- 結果
- 再利用
- ラン
- さび
- 同じ
- を検索
- 選択
- 半導体関連装置
- 形状
- シェアする
- 出荷
- 射撃
- ショート
- 短絡
- ショート
- 側
- シグナル
- シリコン
- 簡単な拡張で
- から
- 小さい
- So
- ソフトウェア
- ソフトウェア開発
- 売ら
- 溶液
- 一部
- すぐに
- ソース
- 仕様
- スピン
- 春
- ステージ
- 開始
- 駅
- まだ
- STM32
- ストリーミング
- 構造
- そのような
- サプライヤー
- 供給
- スイッチ
- 対象となります
- 伝える
- test
- テスト
- より
- それ
- それら
- そこ。
- したがって、
- 彼ら
- この
- それらの
- しかし?
- 介して
- 時間
- 〜へ
- あまりに
- 取った
- 豊富なツール群
- 試します
- オン
- ターニング
- 2
- 下
- 理解された
- 残念ながら
- まで
- us
- USB
- つかいます
- 中古
- 通常
- 非常に
- 可視化
- wanted
- ました
- we
- ウェブ
- 重量
- WELL
- した
- いつ
- which
- 意志
- ワーキング
- リモートで作業する
- まだ
- 貴社
- ゼファーネット
- ゼロ