03年2023月XNUMX日(Nanowerkニュース) 2008 年に「ソフト ロボティクス」という用語が採用されて以来、この分野のエンジニアは、探査、移動、リハビリテーション、さらには宇宙にも役立つ柔軟な機械のさまざまな表現を構築してきました。インスピレーションの源の XNUMX つは、野生動物の動きです。 MIT の研究者チームはこれをさらに一歩進めて、 ソフトズー、エンジニアがソフトロボットの共同設計を研究できるようにする、バイオからインスピレーションを得たプラットフォームです。このフレームワークは、ロボットの外観を決定する設計で構成されるアルゴリズムを最適化します。および制御、またはロボットの動作を可能にするシステムにより、ユーザーが潜在的な機械のアウトラインを自動的に生成する方法が向上します。
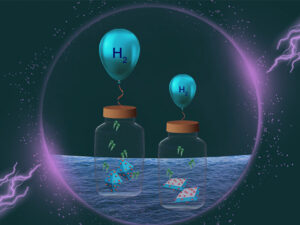
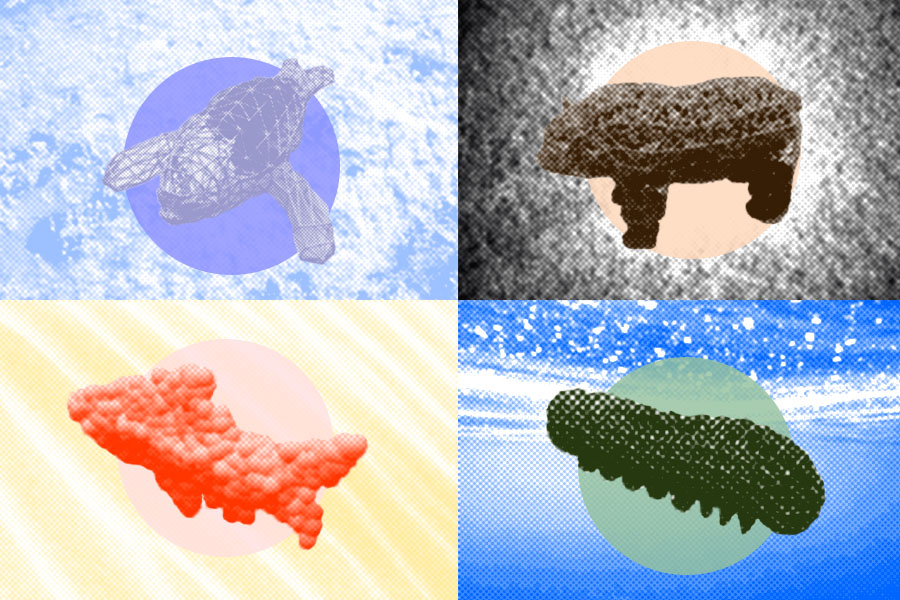 研究者らは、ソフトロボットの共同設計のためのシステムを開発した。これは、ロボットの形状、ロボットの体のどこに筋肉を配置するか、さまざまな体の部位でのロボットの柔らかさなど、ロボットの設計を共同で探索して最適化することを意味する。ロボットの設計に基づいて、目標タスクを達成するためにロボットを制御する方法。 (画像: Alex Shipps/MIT CSAIL と研究者) 自然界を散歩するこのプラットフォームには、移動などのソフトロボットタスクをシミュレートできるデザインとして、パンダ、魚、サメ、毛虫などの動物の 3D モデルが搭載されています。 、機敏な旋回、さまざまな環境での軌道追従。 雪、砂漠、粘土、水のいずれであっても、このプラットフォームは、さまざまな地形におけるさまざまな設計のパフォーマンスのトレードオフを実証します。
「私たちのフレームワークは、ユーザーがロボットの形状に最適な構成を見つけるのに役立ち、さまざまなことを実行できるソフト ロボット工学アルゴリズムを設計できるようになります」と、コンピューター サイエンスおよび人工知能研究所の所属である MIT 博士課程の学生 Tsun-Hsuan Wang 氏は述べています ( CSAIL) はプロジェクトの主任研究者です。 「本質的に、ロボットが環境と対話するための最適な戦略を理解するのに役立ちます。」 SoftZoo は、さまざまな生物群系の物理的特徴に反応する動きをモデル化しているため、既に設計と制御をシミュレートしている同様のプラットフォームよりも包括的です。 このフレームワークの多用途性は、微分可能なマルチフィジックス エンジンによってもたらされており、氷の上で回転するアザラシの赤ちゃんや湿地環境を横切る毛虫など、物理システムのいくつかの側面を同時にシミュレーションできます。 このエンジンの微分可能性により、計算制御や設計の問題を解決するために必要となる、高価なシミュレーションの数が削減され、協調設計が最適化されます。 その結果、ユーザーはより洗練された指定されたアルゴリズムを使用してソフトロボットを設計し、動かすことができます。
さまざまな地形との相互作用をシミュレートするシステムの機能は、さまざまな生物の形、大きさ、形態を研究する生物学の分野である形態学の重要性を示しています。 環境に応じて、同様のタスクを完了する機械の設計図を比較するのと同じように、一部の生物学的構造は他の生物学的構造よりも最適です。
これらの生物学的輪郭は、より特殊化された、地形固有の人工生命を刺激する可能性があります。 「クラゲの緩やかな波状の幾何学形状により、広い水域を効率的に移動することができ、研究者に新種のソフトロボットの開発を促すとともに、完全にインシリコで培養された人工生物の無限の可能性が開かれます」とワン氏は言う。 「さらに、トンボは、翼に飛行時に重心を変える特別な構造を持っているため、他の飛行生物が完了できない非常に機敏な操縦を行うことができます。 私たちのプラットフォームは、トンボが自然に周囲をうまく移動するのと同じ方法で移動を最適化します。」ロボットはこれまで、ロボットの体が周囲の環境に従わなかったため、雑然とした環境を移動するのに苦労していました。 しかし、SoftZoo を使用すると、設計者はロボットの脳と身体を同時に開発し、陸生マシンと水生マシンの両方を共同最適化して、より認識力と専門性を高めることができます。 行動的および形態的知能が向上すると、ロボットは救助任務の完了や探索の実施においてさらに役立つようになるでしょう。 たとえば、洪水中に人が行方不明になった場合、ロボットは SotftZoo プラットフォームで実証された方法を使用して最適化されているため、より効率的に水域を横断できる可能性があります。
「SoftZoo はソフト ロボット設計者にオープンソース シミュレーションを提供し、現実世界のロボットをより簡単かつ柔軟に構築するのに役立ち、同時にさまざまな環境で機械の移動能力を加速します」と研究の共著者であり、MIT の研究員である Chuang Gan 氏は付け加えています。 -IBM Watson AI Lab の彼は、間もなくマサチューセッツ大学アマースト校の助教授に就任します。
「ソフト ロボットの本体とその頭脳 (つまり、コントローラー) を共同設計するこのコンピューターによるアプローチは、特定のタスク用に設計されたカスタマイズされたマシンを迅速に作成するための扉を開きます」と CSAIL およびアンドリューおよびErna Viterbi MIT 電気工学およびコンピュータ サイエンス学部 (EECS) 教授。この著作のもう 1 人の著者でもあります。
あらゆるタイプのロボットが構築される前に、このフレームワークは不自然なシーンのフィールド テストの代替となる可能性があります。 たとえば、クマのようなロボットが砂漠でどのように行動するかを評価することは、ボストンの都市部の平地で研究している研究チームにとっては困難な場合があります。 代わりに、ソフト ロボット工学エンジニアは、SoftZoo の 3D モデルを使用してさまざまな設計をシミュレートし、ロボットを制御するアルゴリズムがナビゲーション時にどの程度効果的であるかを評価できます。 これにより、研究者の時間とリソースが節約されます。
それでも、現在の製造技術の限界が、これらのソフトロボットの設計に生命を吹き込む際に立ちはだかります。 「シミュレーションから物理ロボットへの移行は未解決のままであり、さらなる研究が必要です」とワン氏は言います。 「SoftZoo の筋肉モデル、空間的に変化する剛性、センサー化は、現在の製造技術では直接実現することができないため、私たちはこれらの課題に取り組んでいます。」将来的には、プラットフォームの設計者は、ロボット制御をテストする能力を考慮して、マニピュレーションなどの人力学への応用に注目している。 この可能性を実証するために、Wang 氏のチームは雪玉を前方に投げる 3D アームを設計しました。
研究者らは、ソフトロボットの共同設計のためのシステムを開発した。これは、ロボットの形状、ロボットの体のどこに筋肉を配置するか、さまざまな体の部位でのロボットの柔らかさなど、ロボットの設計を共同で探索して最適化することを意味する。ロボットの設計に基づいて、目標タスクを達成するためにロボットを制御する方法。 (画像: Alex Shipps/MIT CSAIL と研究者) 自然界を散歩するこのプラットフォームには、移動などのソフトロボットタスクをシミュレートできるデザインとして、パンダ、魚、サメ、毛虫などの動物の 3D モデルが搭載されています。 、機敏な旋回、さまざまな環境での軌道追従。 雪、砂漠、粘土、水のいずれであっても、このプラットフォームは、さまざまな地形におけるさまざまな設計のパフォーマンスのトレードオフを実証します。
「私たちのフレームワークは、ユーザーがロボットの形状に最適な構成を見つけるのに役立ち、さまざまなことを実行できるソフト ロボット工学アルゴリズムを設計できるようになります」と、コンピューター サイエンスおよび人工知能研究所の所属である MIT 博士課程の学生 Tsun-Hsuan Wang 氏は述べています ( CSAIL) はプロジェクトの主任研究者です。 「本質的に、ロボットが環境と対話するための最適な戦略を理解するのに役立ちます。」 SoftZoo は、さまざまな生物群系の物理的特徴に反応する動きをモデル化しているため、既に設計と制御をシミュレートしている同様のプラットフォームよりも包括的です。 このフレームワークの多用途性は、微分可能なマルチフィジックス エンジンによってもたらされており、氷の上で回転するアザラシの赤ちゃんや湿地環境を横切る毛虫など、物理システムのいくつかの側面を同時にシミュレーションできます。 このエンジンの微分可能性により、計算制御や設計の問題を解決するために必要となる、高価なシミュレーションの数が削減され、協調設計が最適化されます。 その結果、ユーザーはより洗練された指定されたアルゴリズムを使用してソフトロボットを設計し、動かすことができます。
さまざまな地形との相互作用をシミュレートするシステムの機能は、さまざまな生物の形、大きさ、形態を研究する生物学の分野である形態学の重要性を示しています。 環境に応じて、同様のタスクを完了する機械の設計図を比較するのと同じように、一部の生物学的構造は他の生物学的構造よりも最適です。
これらの生物学的輪郭は、より特殊化された、地形固有の人工生命を刺激する可能性があります。 「クラゲの緩やかな波状の幾何学形状により、広い水域を効率的に移動することができ、研究者に新種のソフトロボットの開発を促すとともに、完全にインシリコで培養された人工生物の無限の可能性が開かれます」とワン氏は言う。 「さらに、トンボは、翼に飛行時に重心を変える特別な構造を持っているため、他の飛行生物が完了できない非常に機敏な操縦を行うことができます。 私たちのプラットフォームは、トンボが自然に周囲をうまく移動するのと同じ方法で移動を最適化します。」ロボットはこれまで、ロボットの体が周囲の環境に従わなかったため、雑然とした環境を移動するのに苦労していました。 しかし、SoftZoo を使用すると、設計者はロボットの脳と身体を同時に開発し、陸生マシンと水生マシンの両方を共同最適化して、より認識力と専門性を高めることができます。 行動的および形態的知能が向上すると、ロボットは救助任務の完了や探索の実施においてさらに役立つようになるでしょう。 たとえば、洪水中に人が行方不明になった場合、ロボットは SotftZoo プラットフォームで実証された方法を使用して最適化されているため、より効率的に水域を横断できる可能性があります。
「SoftZoo はソフト ロボット設計者にオープンソース シミュレーションを提供し、現実世界のロボットをより簡単かつ柔軟に構築するのに役立ち、同時にさまざまな環境で機械の移動能力を加速します」と研究の共著者であり、MIT の研究員である Chuang Gan 氏は付け加えています。 -IBM Watson AI Lab の彼は、間もなくマサチューセッツ大学アマースト校の助教授に就任します。
「ソフト ロボットの本体とその頭脳 (つまり、コントローラー) を共同設計するこのコンピューターによるアプローチは、特定のタスク用に設計されたカスタマイズされたマシンを迅速に作成するための扉を開きます」と CSAIL およびアンドリューおよびErna Viterbi MIT 電気工学およびコンピュータ サイエンス学部 (EECS) 教授。この著作のもう 1 人の著者でもあります。
あらゆるタイプのロボットが構築される前に、このフレームワークは不自然なシーンのフィールド テストの代替となる可能性があります。 たとえば、クマのようなロボットが砂漠でどのように行動するかを評価することは、ボストンの都市部の平地で研究している研究チームにとっては困難な場合があります。 代わりに、ソフト ロボット工学エンジニアは、SoftZoo の 3D モデルを使用してさまざまな設計をシミュレートし、ロボットを制御するアルゴリズムがナビゲーション時にどの程度効果的であるかを評価できます。 これにより、研究者の時間とリソースが節約されます。
それでも、現在の製造技術の限界が、これらのソフトロボットの設計に生命を吹き込む際に立ちはだかります。 「シミュレーションから物理ロボットへの移行は未解決のままであり、さらなる研究が必要です」とワン氏は言います。 「SoftZoo の筋肉モデル、空間的に変化する剛性、センサー化は、現在の製造技術では直接実現することができないため、私たちはこれらの課題に取り組んでいます。」将来的には、プラットフォームの設計者は、ロボット制御をテストする能力を考慮して、マニピュレーションなどの人力学への応用に注目している。 この可能性を実証するために、Wang 氏のチームは雪玉を前方に投げる 3D アームを設計しました。
研究者らは、ソフトロボットの共同設計のためのシステムを開発した。これは、ロボットの形状、ロボットの体のどこに筋肉を配置するか、さまざまな体の部位でのロボットの柔らかさなど、ロボットの設計を共同で探索して最適化することを意味する。ロボットの設計に基づいて、目標タスクを達成するためにロボットを制御する方法。 (画像: Alex Shipps/MIT CSAIL と研究者) 自然界を散歩するこのプラットフォームには、移動などのソフトロボットタスクをシミュレートできるデザインとして、パンダ、魚、サメ、毛虫などの動物の 3D モデルが搭載されています。 、機敏な旋回、さまざまな環境での軌道追従。 雪、砂漠、粘土、水のいずれであっても、このプラットフォームは、さまざまな地形におけるさまざまな設計のパフォーマンスのトレードオフを実証します。
「私たちのフレームワークは、ユーザーがロボットの形状に最適な構成を見つけるのに役立ち、さまざまなことを実行できるソフト ロボット工学アルゴリズムを設計できるようになります」と、コンピューター サイエンスおよび人工知能研究所の所属である MIT 博士課程の学生 Tsun-Hsuan Wang 氏は述べています ( CSAIL) はプロジェクトの主任研究者です。 「本質的に、ロボットが環境と対話するための最適な戦略を理解するのに役立ちます。」 SoftZoo は、さまざまな生物群系の物理的特徴に反応する動きをモデル化しているため、既に設計と制御をシミュレートしている同様のプラットフォームよりも包括的です。 このフレームワークの多用途性は、微分可能なマルチフィジックス エンジンによってもたらされており、氷の上で回転するアザラシの赤ちゃんや湿地環境を横切る毛虫など、物理システムのいくつかの側面を同時にシミュレーションできます。 このエンジンの微分可能性により、計算制御や設計の問題を解決するために必要となる、高価なシミュレーションの数が削減され、協調設計が最適化されます。 その結果、ユーザーはより洗練された指定されたアルゴリズムを使用してソフトロボットを設計し、動かすことができます。
さまざまな地形との相互作用をシミュレートするシステムの機能は、さまざまな生物の形、大きさ、形態を研究する生物学の分野である形態学の重要性を示しています。 環境に応じて、同様のタスクを完了する機械の設計図を比較するのと同じように、一部の生物学的構造は他の生物学的構造よりも最適です。
これらの生物学的輪郭は、より特殊化された、地形固有の人工生命を刺激する可能性があります。 「クラゲの緩やかな波状の幾何学形状により、広い水域を効率的に移動することができ、研究者に新種のソフトロボットの開発を促すとともに、完全にインシリコで培養された人工生物の無限の可能性が開かれます」とワン氏は言う。 「さらに、トンボは、翼に飛行時に重心を変える特別な構造を持っているため、他の飛行生物が完了できない非常に機敏な操縦を行うことができます。 私たちのプラットフォームは、トンボが自然に周囲をうまく移動するのと同じ方法で移動を最適化します。」ロボットはこれまで、ロボットの体が周囲の環境に従わなかったため、雑然とした環境を移動するのに苦労していました。 しかし、SoftZoo を使用すると、設計者はロボットの脳と身体を同時に開発し、陸生マシンと水生マシンの両方を共同最適化して、より認識力と専門性を高めることができます。 行動的および形態的知能が向上すると、ロボットは救助任務の完了や探索の実施においてさらに役立つようになるでしょう。 たとえば、洪水中に人が行方不明になった場合、ロボットは SotftZoo プラットフォームで実証された方法を使用して最適化されているため、より効率的に水域を横断できる可能性があります。
「SoftZoo はソフト ロボット設計者にオープンソース シミュレーションを提供し、現実世界のロボットをより簡単かつ柔軟に構築するのに役立ち、同時にさまざまな環境で機械の移動能力を加速します」と研究の共著者であり、MIT の研究員である Chuang Gan 氏は付け加えています。 -IBM Watson AI Lab の彼は、間もなくマサチューセッツ大学アマースト校の助教授に就任します。
「ソフト ロボットの本体とその頭脳 (つまり、コントローラー) を共同設計するこのコンピューターによるアプローチは、特定のタスク用に設計されたカスタマイズされたマシンを迅速に作成するための扉を開きます」と CSAIL およびアンドリューおよびErna Viterbi MIT 電気工学およびコンピュータ サイエンス学部 (EECS) 教授。この著作のもう 1 人の著者でもあります。
あらゆるタイプのロボットが構築される前に、このフレームワークは不自然なシーンのフィールド テストの代替となる可能性があります。 たとえば、クマのようなロボットが砂漠でどのように行動するかを評価することは、ボストンの都市部の平地で研究している研究チームにとっては困難な場合があります。 代わりに、ソフト ロボット工学エンジニアは、SoftZoo の 3D モデルを使用してさまざまな設計をシミュレートし、ロボットを制御するアルゴリズムがナビゲーション時にどの程度効果的であるかを評価できます。 これにより、研究者の時間とリソースが節約されます。
それでも、現在の製造技術の限界が、これらのソフトロボットの設計に生命を吹き込む際に立ちはだかります。 「シミュレーションから物理ロボットへの移行は未解決のままであり、さらなる研究が必要です」とワン氏は言います。 「SoftZoo の筋肉モデル、空間的に変化する剛性、センサー化は、現在の製造技術では直接実現することができないため、私たちはこれらの課題に取り組んでいます。」将来的には、プラットフォームの設計者は、ロボット制御をテストする能力を考慮して、マニピュレーションなどの人力学への応用に注目している。 この可能性を実証するために、Wang 氏のチームは雪玉を前方に投げる 3D アームを設計しました。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- プラトアイストリーム。 Web3 データ インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- 未来を鋳造する w エイドリエン・アシュリー。 こちらからアクセスしてください。
- 情報源: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :持っている
- :は
- :not
- :どこ
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- 能力
- 加速している
- 達成する
- 越えて
- 追加
- 採択
- 提携
- 使い勝手のいい
- AI
- アレックス
- アルゴリズム
- 許可
- ことができます
- 既に
- an
- および
- アンドルー
- 動物
- 別の
- どれか
- アプローチ
- です
- ARM
- 武器
- 人工の
- 人工知能
- AS
- 側面
- 評価中
- アシスタント
- At
- 著者
- 自動的に
- 赤ちゃん
- ベース
- BE
- ベアーズ
- なぜなら
- き
- BEST
- 生物学
- ボディ
- ボストン
- 両言語で
- 脳
- 脳
- ブランチ
- 持参
- ビルド
- 建物
- by
- 缶
- 機能
- できる
- センター
- 課題
- 挑戦
- 変化する
- 共著者
- comes
- 比較
- コンプリート
- 完了
- 準拠した
- 包括的な
- コンピュータ
- コンピュータサイエンス
- 導電性
- コントロール
- 制御
- 可能性
- 作成
- CSAIL
- 電流プローブ
- カスタマイズ
- 日付
- 実証します
- 実証
- 実証
- 部門
- によっては
- 砂漠
- 設計
- 設計
- デザイナー
- デザイン
- 決定する
- 開発する
- 発展した
- 開発
- 異なります
- 取締役
- 異なる
- do
- によって
- 蜻蛉(トンボ)
- トンボ
- 間に
- 簡単に
- 効果的な
- 効率良く
- 電気工学
- 可能
- エンジン
- エンジニアリング
- エンジニア
- 完全に
- 環境
- 環境
- 本質
- 評価する
- さらに
- 例
- 高価な
- 探査
- 特徴
- フィールド
- もう完成させ、ワークスペースに掲示しましたか?
- フレキシブル
- 洪水
- 飛行
- フォロー中
- フォーム
- フォワード
- フレームワーク
- から
- さらに
- 未来
- 生成する
- 与えられた
- 把握
- 持ってる
- 助けます
- 助け
- ことができます
- 認定条件
- HTTPS
- 人間
- ICE
- if
- 説明する
- 画像
- 重要性
- 改善
- in
- 含めて
- 増加した
- ひらめき
- インスパイア
- インスピレーション
- を取得する必要がある者
- インテリジェンス
- 対話
- 相互作用
- IT
- ITS
- JPG
- ラボ
- 実験室
- 大
- つながる
- 生活
- ような
- 制限
- 見て
- のように見える
- マシン
- 操作
- 多くの
- 質量
- マサチューセッツ州
- 五月..
- 手段
- 力学
- メソッド
- 真ん中
- 行方不明
- ミッション
- マサチューセッツ工科大学(MIT)
- モデル
- 他には?
- モーション
- 運動
- ずっと
- ナビゲート
- ナビゲーション
- 新作
- 数
- オブジェクト
- of
- 頻繁に
- on
- ONE
- オープンソース
- 開設
- 開きます
- 最適な
- 最適化
- 最適化
- 最適化
- or
- その他
- その他
- 私たちの
- 輪郭
- path
- 実行する
- パフォーマンス
- 人
- 物理的な
- プラットフォーム
- プラットフォーム
- プラトン
- プラトンデータインテリジェンス
- プラトデータ
- の可能性
- 潜在的な
- :
- 前に
- 問題
- 東京大学大学院海洋学研究室教授
- プロジェクト
- は、大阪で
- 置きます
- 急速に
- 反応する
- 現実の世界
- 実現
- 縮小
- 地域
- リハビリテーション
- 残っている
- の提出が必要です
- 必要
- レスキュー用機材
- 研究
- 研究者
- 研究者
- リソース
- 結果
- ロボット
- ロボット工学
- ロボット
- 同じ
- Save
- 言う
- シーン
- 科学
- 科学者
- 検索
- いくつかの
- 形状
- シェイプ
- シャークス
- 側
- 同様の
- 同時に
- から
- サイズ
- 雪
- So
- ソフト
- 解決する
- 一部
- すぐに
- 洗練された
- ソース
- スペース
- 特別
- 専門の
- 特定の
- 指定の
- スタック
- スタンド
- 手順
- まだ
- 作戦
- 学生
- 研究
- 勉強
- そのような
- 取得
- ターゲット
- 仕事
- タスク
- チーム
- テクニック
- 地上の
- test
- テスト
- より
- それ
- 未来
- アプリ環境に合わせて
- それら
- その後
- ボーマン
- 彼ら
- 物事
- この
- しかし?
- 介して
- 投げる
- 時間
- 〜へ
- 旅行
- 順番
- ターニング
- type
- わかる
- 大学
- 無限の
- 都市
- us
- つかいます
- users
- さまざまな
- 非常に
- ました
- 水
- ウォーターズ
- ワトソン
- 仕方..
- we
- した
- この試験は
- いつ
- かどうか
- which
- while
- 誰
- ワイルド
- 野生生物
- 意志
- 仕事
- ワーキング
- でしょう
- ゼファーネット