2016 年、自然環境研究評議会 (NERC) は、英国の次期世界クラスの極地調査船の名前をクラウドソーシングするキャンペーンを開始しました。
世論調査は予想通りにはいきませんでした。
暴走した勝者 に代わる王立調査船 (RRS) の名前 RRSジェイムズ・クラーク・ロス および RRS アーネスト・シャクルトン それは「ボーティ・マクボートフェイス」でした。 この名前は 120,000 票を超える票を獲得し、「Usain Boat」や「It's Bloody Cold Here」などの候補を抑えて快勝しました。
この船はその後、 RRS サー・デビッド・アッテンボロー、ベテランの放送局と博物学者に敬意を表して付けられましたが、ボーティ・マクボートフェイスという名前の世間の人気は無視できませんでした。
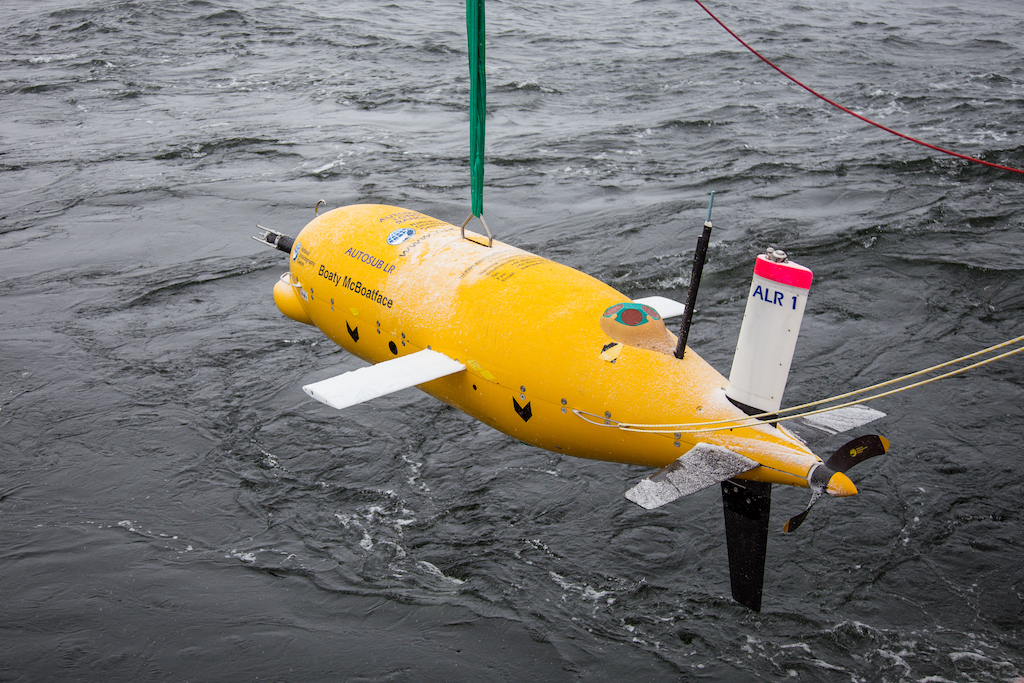
翌年、 国立海洋学センター (NOC) が発表した。 XNUMX つの新しい自律型水中車両 (AUVは)その名前を誇らしげに持つでしょう。
長さ約 3.5 メートル、直径 80 cm のこれらのロボット潜水艦は、人間のパイロットを必要とせずに世界中の海洋を探索し、他の方法ではアクセスできない遠隔地でデータを収集するために使用されています。
過去 40 年間、Boaty は気候研究を支援するために世界中に展開されてきました。 この遠征には、スウェイツ氷河に対する気候変動の影響を調査するために、南極の棚氷の下をXNUMXkm移動することが含まれています。
それがすべて始まったところ
最初の自律型水中車両は 1950 年代に海に打ち上げられ、商業、軍事、諜報目的での使用を目的としていました。
によって開発されたこの装置は、 応用物理研究所 および ワシントン大学 アメリカでは、と名付けられた SPURV (特別目的水中研究車両)。 北極海での研究用に設計されたその船体はアルミニウム製で、魚雷のような形状をしていました。 この AUV の制御は音響通信によって行われ、1979 年まで海洋研究に使用され成功していました。
国立海洋センター (NOC) は、 自動サブ 1990 年代以降の AUV のラインナップ。 その目的は、既存の水中ビークル技術を活用し、海洋物理学や地球科学などの分野にわたる研究能力を強化することでした。
1996 年 XNUMX 月に遡ると、NOC 史上初の自動潜水ミッションがサウサンプトンの NOC のエンプレス ドックで行われました。 これは、AUV がどのように遠隔制御できるかを実証するための一連の短い試験から始まりました。
XNUMXか月後、ドーセット州ポートランド港でのXNUMX週間の試験中に、最初のXNUMX分間の自律飛行ミッションが実施された。 自動潜水艦は XNUMX メートルまで潜水し、一定の機首方位を維持し、必要な深さの XNUMX メートル以内に制御しました。
今日まで話を進めると、当社の AUV 艦隊は現在、最大 6,000 メートルまで潜水し、これまで調査船がアクセスできなかった氷床の下の狭い水路を通過できるようになりました。 この急速な発展は、AUV が遠隔地から荒れ狂う外海まであらゆる場所で測定値を取得できることを意味します。

NOC の AUV にはさまざまなセンサーを装備することができ、科学者は温度、塩分、海流、海底の形状などのデータを測定できます。
AUV は打ち上げ前に、どこに行くか、何を測定するか、どの深さまで行くかという指示をプログラムされています。 最先端のセンサー技術を使用することで、AUV を船や海岸から展開し、数百マイルの海上を航行して地球の気候に関する重要なデータを収集することができ、長くて費用のかかる有人探検の必要性が軽減されます。
稼働中のAUV
AUV は科学コミュニティに複数のメリットをもたらします。 バッテリー寿命が長く、長距離をカバーできるため、一度に数か月間配備できます。 これにより、科学者は長期間にわたってデータを収集し、より包括的な観察記録を作成できるようになります。
たとえば、私たちは最近、 研究 海洋が有機炭素をどのように取り込むかについての知識のギャップを調査する 生物学的炭素ポンプ。 この重要なプロセスでは、有機物が大気から取り込んだ炭素を運びながら海の底に沈みます。
チームは自律型水中技術を使用して炭素循環の要素を評価し、ポンプの将来予測を更新しました。 この研究は、現世代の生物炭素ポンプ強度間の差異を強調しました。 気候モデル のために使用される 気候変動に関する政府間パネル (IPCC) の評価。 新しい研究では、海洋炭素の全体的な循環における現在および将来の推定値の不確実性を軽減するために必要な観測結果が特定され、より堅牢な気候モデルが可能になりました。

今年、チームは新しいラボオンチップセンサーと微粒子カメラシステムを統合し、科学者が炭素が海洋をどのように移動しているかを評価できるようにしています。 AUV が特定の場所に到達できる範囲の長さに関して信じられないほどの革新が行われ、異なる季節間の変化についての理解がさらに深まりました。
スウェイツ氷河と廃止された油田
2022の開始時に、 エンジニアたちはスウェイツ氷河に向かった 科学者が南極で 氷が失われる原因 それは、その劣化が海面上昇にどのように寄与するかをより正確に予測するためです。
スウェイツ周辺の海氷は異常に厚く密度が高いため、研究チームは隣接するドットソン棚氷の周囲で調査を実施した。
ボートティ・マクボートフェイスは棚氷の下を40km以上航行し、海流、乱流、および温度、塩分、溶存酸素などの海水のその他の特性を測定した。 この情報はまだ処理中ですが、棚氷のはるか下の深層水の特性を理解し、それらがどのように融解プロセスを推進しているかを調査するのに役立ちます。
長距離自動潜水艦の使用は、気候変動の影響を理解するために重要な海洋データを収集する方法を変えるのに役立ちました。
また、使用済み油田における環境への潜在的な影響を検出するための、ハイテクで低影響のモニタリングに Boaty を使用するというコンセプトの試行も開始しました。
2022 年秋、ボーティ氏は北海の工業地帯を監視する任務を負った。 自動潜水艦は、いくつかの廃止された石油とガスのサイト、およびブレーマー ポックマークス海洋保護区を探索し、水、汚染物質、海流に関するデータを収集し、海底の画像を撮影しました。
石油・ガス施設の縮小に伴い、自動潜水艦は廃炉作業前、廃炉作業中、廃炉作業後の海域の評価と監視において重要な役割を果たすことができます。
このプロジェクトの成功により、海洋調査の実施方法に革命が起こり、業界がネットゼロ目標に向けて移行できるようになるはずです。
次は何ですか?
今年、NOC は、より幅広い科学分野をサポートするために AUV の機能を拡張することに取り組んでいます。
当社は、北大西洋における今後の生物地球化学研究をサポートできるよう自動潜水艦を装備するための新しいセンサーを統合し、南極の海氷付近および海氷下での長期配備のための自律性を強化します。

現在、別のプロジェクトで新しいサービスの提供に取り組んでいます。 ネットゼロ海洋学能力 (NZOC) 研究プログラム。 これは、より少ない二酸化炭素排出量で海洋研究能力を開発することを目的としています。
そのためには、グリーン燃料、自動船舶運航、最先端のバッテリー技術、AIの最適化、新しいセンサー技術、世界をリードするロボット工学に至る技術の移行が必要となります。
私たちは、Boaty McBoatface が今後どのような初めてのことを達成できるか楽しみにしています。
このストーリーのシェアライン
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- Platoblockchain。 Web3メタバースインテリジェンス。 知識の増幅。 こちらからアクセスしてください。
- 情報源: https://www.carbonbrief.org/guest-post-how-boaty-mcboatface-is-becoming-instrumental-for-ocean-science/
- :は
- $UP
- 000
- 1996
- 2016
- 2022
- 7
- a
- できる
- 私たちについて
- AC
- 達成する
- 越えて
- 後
- 先んじて
- AI
- 目指して
- すべて
- 許可
- ことができます
- および
- 発表の
- 別の
- 南極大陸
- 北極の
- です
- AREA
- エリア
- 周りに
- AS
- 評価中
- アセスメント
- At
- 雰囲気
- 自動化
- 自律的
- バック
- バッテリー
- バッテリーの寿命
- BBC
- BE
- になる
- さ
- 利点
- より良いです
- の間に
- 流血の
- ボトム
- より広い
- by
- カメラ
- キャンペーン
- 缶
- 機能
- カーボン
- カーボンフットプリント
- キャリー
- 携帯
- センター
- 変化する
- 変化
- チャンネル
- 気候
- 気候変動
- CO
- 収集する
- コマーシャル
- 通信部
- コミュニティ
- 包括的な
- コンセプト
- 定数
- 貢献する
- コントロール
- 制御
- 可能性
- 協議会
- カバー
- カバレッジ
- クレジット
- 重大な
- 電流プローブ
- 現在
- 最先端
- サイクル
- データ
- デイビッド
- 深いです
- 配信する
- 実証します
- 展開
- 配備
- 深さ
- どん底
- 設計
- 開発する
- 発展した
- 開発
- 開発
- デバイス
- DID
- 異なります
- ドック
- ダウン
- 運転
- 間に
- 効果
- 要素は
- enable
- エンジニア
- 強化
- 環境
- 環境の
- 装備
- 見積もり
- エーテル(ETH)
- EVER
- 例
- 興奮した
- 既存の
- 予想される
- 探る
- 調査済み
- 伸ばす
- 広範囲
- FRBは
- フィールズ
- 名
- 艦隊
- 床
- フォロー中
- フットプリント
- 今度の
- フォワード
- から
- 燃料
- さらに
- 未来
- GAS
- 集まり
- 世代
- 取得する
- Go
- グリーン
- ゲスト
- ゲストのポスト
- 半分
- 持ってる
- 向かって
- 見出し
- 助けます
- 強調表示された
- ヒット
- 認定条件
- HTML
- HTTP
- HTTPS
- 人間
- 何百
- ICE
- 特定され
- 画像
- 影響
- 重要
- in
- アクセスできない
- include
- 含めて
- 信じられない
- インダストリアル
- 産業を変えます
- 情報
- イノベーション
- 説明書
- インストルメンタル
- 統合
- インテリジェンス
- 調べる
- IT
- ITS
- 知識
- 姓
- 打ち上げ
- ツェッペリン
- 長さ
- レベル
- 生活
- 場所
- 長い
- 長期的
- より長いです
- 製
- 船舶
- 問題
- 最大幅
- 手段
- だけど
- 計測
- ミリタリー用(軍用)機材
- ミッション
- ミッション
- モデル
- モニタリング
- 月
- ヶ月
- 他には?
- 移動する
- の試合に
- 名
- 名前付き
- 国民
- ナチュラル
- 自然
- ナビゲート
- 近く
- 必要
- ネットゼロ
- 新作
- 次の
- ノース
- 北海
- 小説
- 海洋
- 海
- of
- 提供
- 油
- 石油とガス
- on
- 開いた
- 業務執行統括
- 注文
- オーガニック
- その他
- さもないと
- 全体
- 酸素
- パネル
- 期間
- PHP
- 物理的な
- 物理学
- 選ぶ
- パイロット
- 場所
- プラトン
- プラトンデータインテリジェンス
- プラトデータ
- プレイ
- 極性の
- 世論調査
- 人気
- ポートランド
- ポスト
- 潜在的な
- 予測する
- 前に
- プロセス
- ラボレーション
- プログラム
- プログラム
- プロジェクト
- 予測
- プロパティ
- 保護された
- 誇らしげに
- 公共
- ポンプ
- 目的
- 目的
- 範囲
- 急速な
- 準備
- 最近
- 記録
- 減らします
- 縮小
- リモート
- replace
- 必要とする
- の提出が必要です
- 研究
- 革命
- 上昇
- ロボット
- ロボット工学
- 堅牢な
- 職種
- ロイヤル
- 科学
- 科学者たち
- SEA
- 海面
- 季節
- 見て
- センサー
- シリーズ
- いくつかの
- 形状
- 棚
- 棚
- 船
- ショート
- すべき
- から
- 卿
- サイト
- より小さい
- サウサンプトン
- スパン
- 特別
- 特定の
- start
- 開始
- 最先端の
- まだ
- 力
- 勉強
- 続いて
- 成功
- 首尾よく
- そのような
- サポート
- 支援する
- システム
- 取る
- 取り
- 取得
- ターゲット
- チーム
- テクノロジー
- テクノロジー
- それ
- 未来
- 世界
- アプリ環境に合わせて
- それら
- 三
- 介して
- 時間
- 〜へ
- 今日
- に向かって
- 遷移
- 旅行
- 試験
- 不確実性
- 下
- わかる
- 理解する
- 水中
- アップデイト
- us
- つかいます
- 自動車
- 容器
- ベテラン
- 極めて重要な
- 票
- ワシントン
- 水
- ウォーターズ
- 仕方..
- 週間
- WELL
- この試験は
- which
- 意志
- 以内
- 無し
- ワーキング
- 世界
- ワールドクラス
- 世界の
- でしょう
- 年
- 年
- ゼファーネット