29 במאי 2023 (חדשות Nanowerk) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
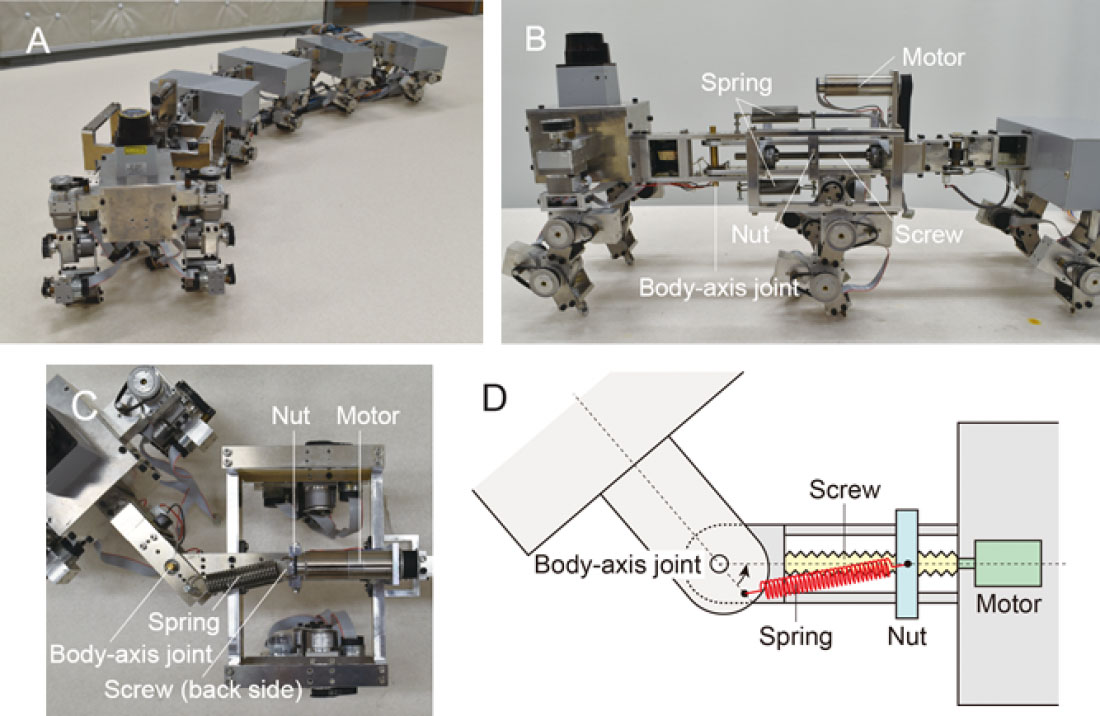 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in רובוטיקה רכה (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in רובוטיקה רכה (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
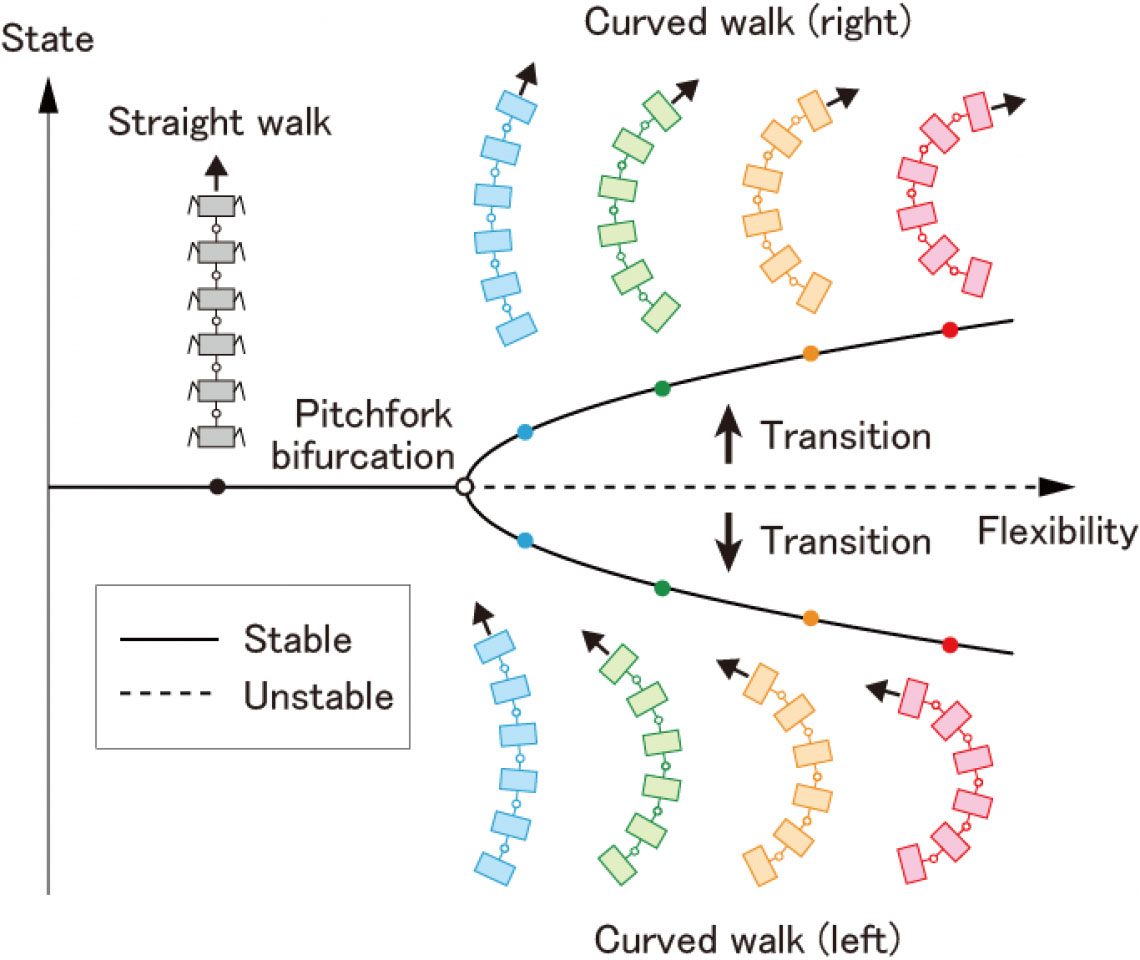 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in רובוטיקה רכה (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- הפצת תוכן ויחסי ציבור מופעל על ידי SEO. קבל הגברה היום.
- PlatoAiStream. Web3 Data Intelligence. הידע מוגבר. גישה כאן.
- הטבעת העתיד עם אדריאן אשלי. גישה כאן.
- קנה ומכירה של מניות בחברות PRE-IPO עם PREIPO®. גישה כאן.
- מקור: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :לֹא
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- יכולת
- יכול
- לפעול
- תוספת
- נוסף
- מתכוונן
- יתרון
- זריז
- AL
- מאפשר
- an
- ו
- בעלי חיים
- אחר
- יישומים
- גישה
- ARE
- אזורים
- AS
- לעזור
- At
- ניסיתי
- מחבר
- אוטונומי
- לְהִמָנַע
- צִיר
- BE
- כי
- הופך להיות
- גוּף
- שניהם
- התמוטטות
- בִּניָן
- אבל
- by
- נקרא
- CAN
- מרכז
- מסוים
- שינויים
- משתנה
- מורכב
- מורכבות
- המחשב
- כוח מחשב
- מחובר
- לִשְׁלוֹט
- נשלט
- שליטה
- בקרות
- להמיר
- יכול
- יוצרים
- יצירה
- מסוכן
- תַאֲרִיך
- תואר
- מַחלָקָה
- תלוי
- לתאר
- עיצוב
- מפותח
- ישירות
- עושה
- ראוי
- בְּמַהֲלָך
- דינמי
- E&T
- כל אחד
- כדור הארץ
- יעיל
- או
- לאפשר
- אנרגיה
- מהנדסים
- זן
- סביבות
- אֲפִילוּ
- התפתח
- חקירה
- מאוד
- גמישות
- גמיש
- בעד
- מצא
- החל מ-
- חזית
- פונקציה
- עתיד
- Go
- מאוד
- יש
- גָבוֹהַ
- אולם
- HTTPS
- תמונה
- שיפורים
- in
- לכלול
- גדל
- השראה
- אי יציבות
- במקום
- אל תוך
- בדוי
- חוקרים
- IT
- jpg
- סוג
- גָדוֹל
- הוביל
- עזבו
- רגליים
- להגביל
- מקומות
- מגרש
- עשוי
- עשייה
- מאי..
- מֵכָנִי
- מנגנון
- מנגנוני
- אמצע
- ניידות
- שונים
- רוב
- תנועה
- מוטורס
- תנועה
- טבעי
- נווט
- צורך
- חדש
- בדרך כלל
- עַכשָׁיו
- מספר
- of
- לעתים קרובות
- on
- ONE
- or
- אחר
- יותר
- שֶׁלוֹ
- תבנית
- דפוסי
- כוכבי לכת
- אפלטון
- מודיעין אפלטון
- אפלטון נתונים
- כּוֹחַ
- מספק
- לאור
- מָהִיר
- רכס
- במקום
- לְהַגִיעַ
- לאחרונה
- להפחית
- חזר
- דרישות
- דורש
- להציל
- חוקרים
- תקין
- רובוט
- רובוטיקה
- רובוטים
- חָסוֹן
- אומר
- תרחישים
- מדע
- חיפוש
- קטע
- מגזרים
- בחומרה
- הראה
- מצב
- שישה
- So
- רך
- במידה מסוימת
- ספציפי
- יציב
- ישר
- לחץ
- לימוד
- כזה
- מערכת
- מערכות
- לוקח
- נטילת
- מטרות
- נבחרת
- זֶה
- השמיים
- שֶׁלָהֶם
- אותם
- אלה
- זֶה
- ל
- חלק עליון
- לקראת
- מעברים
- לנסות
- תור
- שתיים
- אוניברסיטה
- להשתמש
- באמצעות
- מגוון
- כלי רכב
- באמצעות
- לצפיה
- הליכה
- טוֹב
- היו
- אשר
- מי
- רָחָב
- טווח רחב
- עם
- לְלֹא
- תיק עבודות
- עובד
- היה
- זפירנט
עוד מ ננוווק


אינטגרציה מבוססת אוריגמי של רובוטים שחשים, מחליטים ומגיבים
צומת המקור: 2565107
בול זמן: אפריל 4, 2023
מבנים הדו-מימדיים מבוססי פרוסקיט: בנייה, מאפיינים ויישומים
צומת המקור: 1938788
בול זמן: פבואר 3, 2023

החוקרים מפרטים מאפיינים שטרם נראו במשפחה של מתכות קגומה מוליכות-על
צומת המקור: 1952937
בול זמן: פבואר 11, 2023
מעגלים פוטוניים משולבים יכולים לעזור לסגור את 'פער הטרה-הרץ'
צומת המקור: 1899339
בול זמן: יאן 14, 2023