29 maggio 2023 (Notizie Nanowerk) I ricercatori del Dipartimento di Scienze Meccaniche e Bioingegneria dell'Università di Osaka hanno inventato un nuovo tipo di robot ambulante che sfrutta l'instabilità dinamica per spostarsi. Modificando la flessibilità degli accoppiamenti, il robot può essere fatto girare senza la necessità di complessi sistemi di controllo computazionale. Questo lavoro potrebbe aiutare la creazione di robot di salvataggio in grado di attraversare terreni irregolari. La maggior parte degli animali sulla Terra ha sviluppato un robusto sistema di locomozione utilizzando le gambe che fornisce loro un elevato grado di mobilità in un’ampia gamma di ambienti. Con una certa delusione, gli ingegneri che hanno tentato di replicare questo approccio hanno spesso scoperto che i robot dotati di gambe sono sorprendentemente fragili. La rottura anche di una gamba a causa dello stress ripetuto può limitare gravemente la capacità di funzionamento di questi robot. Inoltre, il controllo di un gran numero di giunti in modo che il robot possa attraversare ambienti complessi richiede molta potenza del computer. I miglioramenti in questo progetto sarebbero estremamente utili per costruire robot autonomi o semi-autonomi che potrebbero fungere da veicoli di esplorazione o di salvataggio ed entrare in aree pericolose.
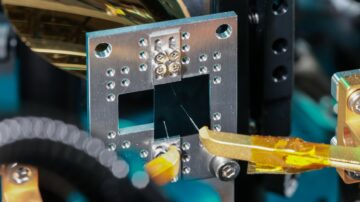
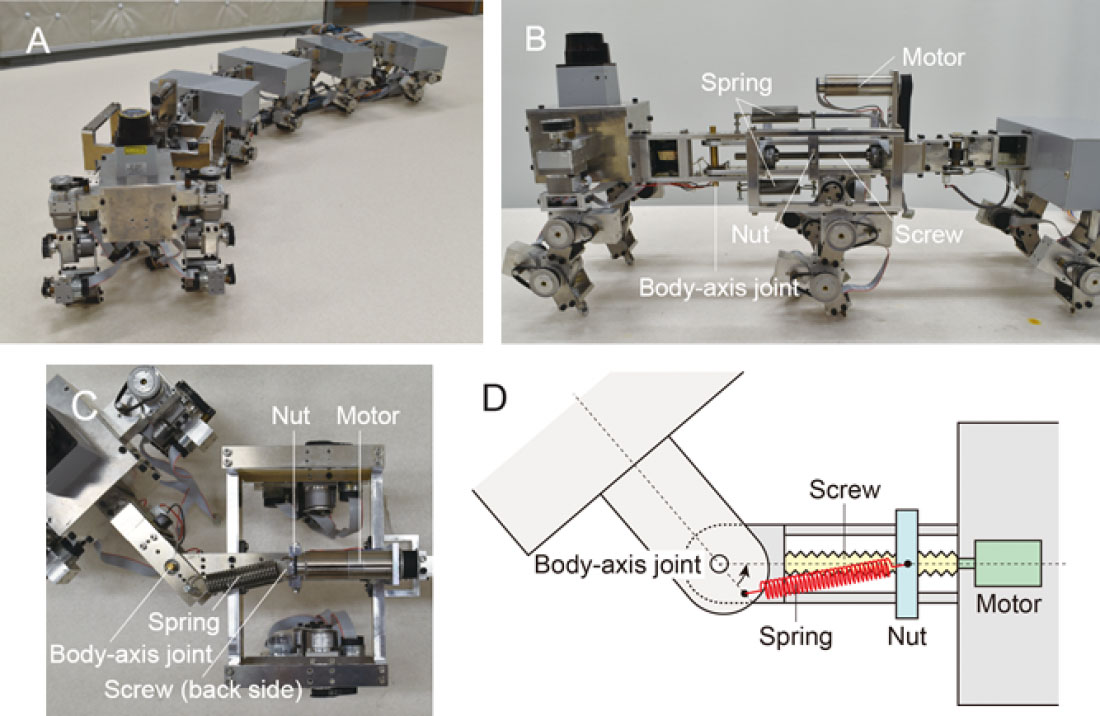 Robot Myriapod (A) e meccanismo di flessibilità dell'asse corpo variabile (B. Vista frontale, C. Vista dall'alto, D. Schemi della vista dall'alto). (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ora, i ricercatori dell'Università di Osaka hanno sviluppato un robot biomimetico "miriapode" che sfrutta un'instabilità naturale in grado di convertire la camminata dritta in movimento curvo. In uno studio pubblicato di recente su Robotica morbida ("Locomozione manovrabile ed efficiente di un robot miriapode con flessibilità variabile dell'asse corporeo tramite instabilità e biforcazione"), i ricercatori dell'Università di Osaka descrivono il loro robot, composto da sei segmenti (con due gambe collegate a ciascun segmento) e giunti flessibili. Utilizzando una vite regolabile è possibile modificare la flessibilità degli accoppiamenti con motori durante il movimento della camminata. I ricercatori hanno dimostrato che l’aumento della flessibilità delle articolazioni porta a una situazione chiamata “biforcazione del forcone”, in cui la camminata dritta diventa instabile. Invece, il robot passa alla camminata seguendo uno schema curvo, a destra o a sinistra. Normalmente, gli ingegneri cercherebbero di evitare di creare instabilità. Tuttavia, farne un uso controllato può consentire una manovrabilità efficiente. "Siamo stati ispirati dalla capacità di alcuni insetti estremamente agili che consente loro di controllare l'instabilità dinamica nei propri movimenti per indurre rapidi cambiamenti di movimento", afferma Shinya Aoi, autore dello studio. Poiché questo approccio non guida direttamente il movimento dell’asse del corpo, ma ne controlla piuttosto la flessibilità, può ridurre notevolmente sia la complessità computazionale che il fabbisogno energetico.
Robot Myriapod (A) e meccanismo di flessibilità dell'asse corpo variabile (B. Vista frontale, C. Vista dall'alto, D. Schemi della vista dall'alto). (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ora, i ricercatori dell'Università di Osaka hanno sviluppato un robot biomimetico "miriapode" che sfrutta un'instabilità naturale in grado di convertire la camminata dritta in movimento curvo. In uno studio pubblicato di recente su Robotica morbida ("Locomozione manovrabile ed efficiente di un robot miriapode con flessibilità variabile dell'asse corporeo tramite instabilità e biforcazione"), i ricercatori dell'Università di Osaka descrivono il loro robot, composto da sei segmenti (con due gambe collegate a ciascun segmento) e giunti flessibili. Utilizzando una vite regolabile è possibile modificare la flessibilità degli accoppiamenti con motori durante il movimento della camminata. I ricercatori hanno dimostrato che l’aumento della flessibilità delle articolazioni porta a una situazione chiamata “biforcazione del forcone”, in cui la camminata dritta diventa instabile. Invece, il robot passa alla camminata seguendo uno schema curvo, a destra o a sinistra. Normalmente, gli ingegneri cercherebbero di evitare di creare instabilità. Tuttavia, farne un uso controllato può consentire una manovrabilità efficiente. "Siamo stati ispirati dalla capacità di alcuni insetti estremamente agili che consente loro di controllare l'instabilità dinamica nei propri movimenti per indurre rapidi cambiamenti di movimento", afferma Shinya Aoi, autore dello studio. Poiché questo approccio non guida direttamente il movimento dell’asse del corpo, ma ne controlla piuttosto la flessibilità, può ridurre notevolmente sia la complessità computazionale che il fabbisogno energetico.
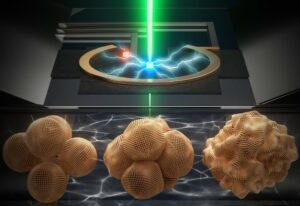
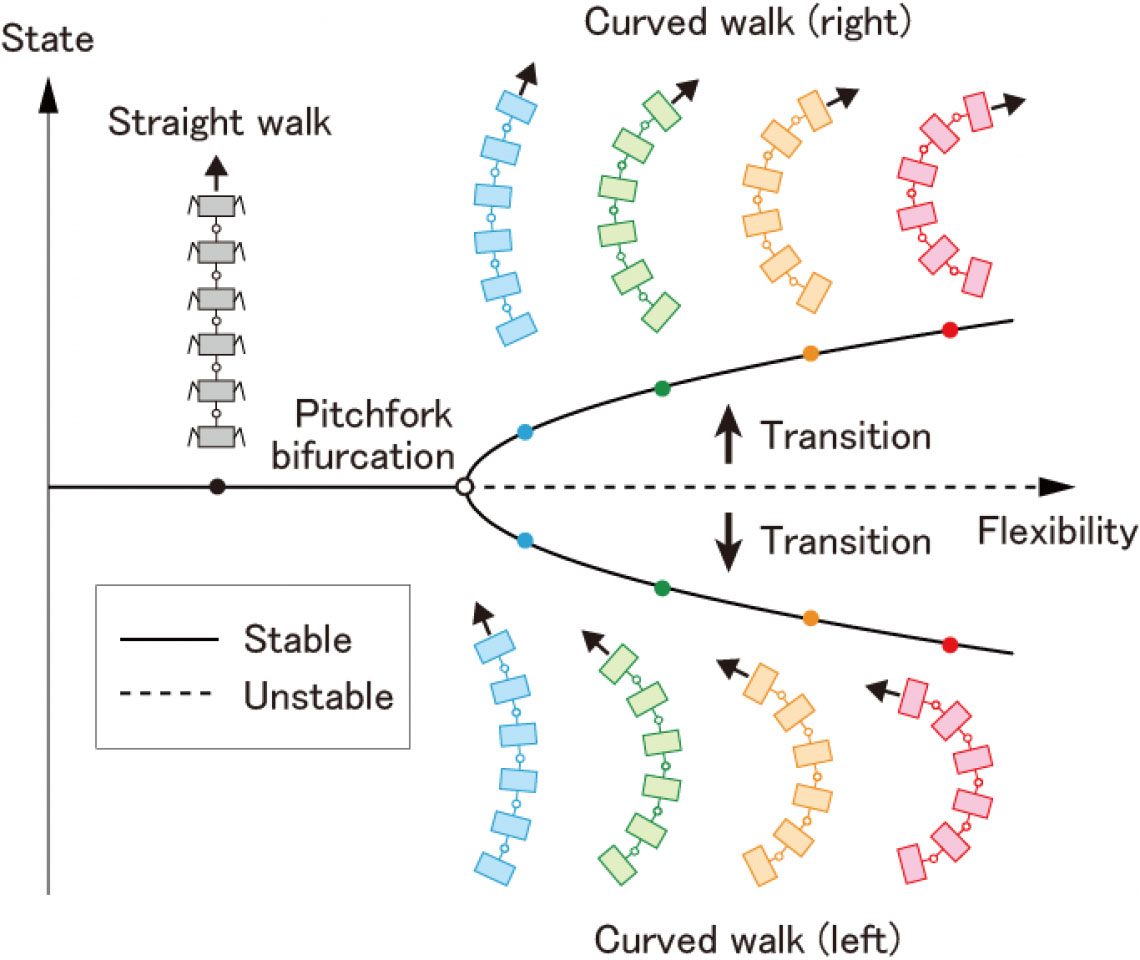 Schemi di deambulazione stabili e instabili a seconda della flessibilità dell'asse del corpo. (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Il team ha testato la capacità del robot di raggiungere posizioni specifiche e ha scoperto che poteva spostarsi seguendo percorsi curvi verso obiettivi. “Possiamo prevedere applicazioni in un’ampia varietà di scenari, come ricerca e salvataggio, lavoro in ambienti pericolosi o esplorazione su altri pianeti”, afferma Mau Adachi, un altro autore dello studio. Le versioni future potrebbero includere segmenti aggiuntivi e meccanismi di controllo.
Schemi di deambulazione stabili e instabili a seconda della flessibilità dell'asse del corpo. (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Il team ha testato la capacità del robot di raggiungere posizioni specifiche e ha scoperto che poteva spostarsi seguendo percorsi curvi verso obiettivi. “Possiamo prevedere applicazioni in un’ampia varietà di scenari, come ricerca e salvataggio, lavoro in ambienti pericolosi o esplorazione su altri pianeti”, afferma Mau Adachi, un altro autore dello studio. Le versioni future potrebbero includere segmenti aggiuntivi e meccanismi di controllo.
Robot Myriapod (A) e meccanismo di flessibilità dell'asse corpo variabile (B. Vista frontale, C. Vista dall'alto, D. Schemi della vista dall'alto). (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Ora, i ricercatori dell'Università di Osaka hanno sviluppato un robot biomimetico "miriapode" che sfrutta un'instabilità naturale in grado di convertire la camminata dritta in movimento curvo. In uno studio pubblicato di recente su Robotica morbida ("Locomozione manovrabile ed efficiente di un robot miriapode con flessibilità variabile dell'asse corporeo tramite instabilità e biforcazione"), i ricercatori dell'Università di Osaka descrivono il loro robot, composto da sei segmenti (con due gambe collegate a ciascun segmento) e giunti flessibili. Utilizzando una vite regolabile è possibile modificare la flessibilità degli accoppiamenti con motori durante il movimento della camminata. I ricercatori hanno dimostrato che l’aumento della flessibilità delle articolazioni porta a una situazione chiamata “biforcazione del forcone”, in cui la camminata dritta diventa instabile. Invece, il robot passa alla camminata seguendo uno schema curvo, a destra o a sinistra. Normalmente, gli ingegneri cercherebbero di evitare di creare instabilità. Tuttavia, farne un uso controllato può consentire una manovrabilità efficiente. "Siamo stati ispirati dalla capacità di alcuni insetti estremamente agili che consente loro di controllare l'instabilità dinamica nei propri movimenti per indurre rapidi cambiamenti di movimento", afferma Shinya Aoi, autore dello studio. Poiché questo approccio non guida direttamente il movimento dell’asse del corpo, ma ne controlla piuttosto la flessibilità, può ridurre notevolmente sia la complessità computazionale che il fabbisogno energetico.
Schemi di deambulazione stabili e instabili a seconda della flessibilità dell'asse del corpo. (Immagine: CC BY-NC, 2023, Aoi et al., Soft Robotics) Il team ha testato la capacità del robot di raggiungere posizioni specifiche e ha scoperto che poteva spostarsi seguendo percorsi curvi verso obiettivi. “Possiamo prevedere applicazioni in un’ampia varietà di scenari, come ricerca e salvataggio, lavoro in ambienti pericolosi o esplorazione su altri pianeti”, afferma Mau Adachi, un altro autore dello studio. Le versioni future potrebbero includere segmenti aggiuntivi e meccanismi di controllo.
- Distribuzione di contenuti basati su SEO e PR. Ricevi amplificazione oggi.
- PlatoAiStream. Intelligenza dei dati Web3. Conoscenza amplificata. Accedi qui.
- Coniare il futuro con Adryenn Ashley. Accedi qui.
- Acquista e vendi azioni in società PRE-IPO con PREIPO®. Accedi qui.
- Fonte: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :non
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- capacità
- capace
- Legge
- aggiunta
- aggiuntivo
- regolabile
- Vantaggio
- agile
- AL
- consente
- an
- ed
- animali
- Un altro
- applicazioni
- approccio
- SONO
- aree
- AS
- assistere
- At
- tentato
- autore
- autonomo
- evitare
- Axis
- BE
- perché
- diventa
- stile di vita
- entrambi
- Guasto
- Costruzione
- ma
- by
- detto
- Materiale
- centro
- certo
- Modifiche
- cambiando
- complesso
- complessità
- computer
- potenza del computer
- collegato
- di controllo
- controllata
- controllo
- controlli
- convertire
- potuto
- Creazione
- creazione
- Pericoloso
- Data
- Laurea
- Shirts Department
- Dipendente
- descrivere
- Design
- sviluppato
- direttamente
- effettua
- dovuto
- durante
- dinamico
- E&T
- ogni
- terra
- efficiente
- o
- enable
- energia
- Ingegneri
- entrare
- ambienti
- Anche
- si è evoluta
- esplorazione
- estremamente
- Flessibilità
- flessibile
- Nel
- essere trovato
- da
- anteriore
- function
- futuro
- Go
- molto
- Avere
- Alta
- Tuttavia
- HTTPS
- Immagine
- miglioramenti
- in
- includere
- crescente
- fonte di ispirazione
- instabilità
- invece
- ai miglioramenti
- Inventato
- Investigatori
- IT
- jpg
- Genere
- grandi
- Guidato
- a sinistra
- gambe
- LIMITE
- posizioni
- lotto
- fatto
- Fare
- Maggio..
- meccanico
- meccanismo
- meccanismi di
- In mezzo
- mobilità
- modificato
- maggior parte
- movimento
- motori
- movimento
- Naturale
- Navigare
- Bisogno
- New
- normalmente
- adesso
- numero
- of
- di frequente
- on
- ONE
- or
- Altro
- ancora
- proprio
- Cartamodello
- modelli
- Pianeti
- Platone
- Platone Data Intelligence
- PlatoneDati
- energia
- fornisce
- pubblicato
- Presto
- gamma
- piuttosto
- raggiungere
- recentemente
- ridurre
- ripetuto
- Requisiti
- richiede
- salvataggio
- ricercatori
- destra
- robot
- robotica
- robot
- robusto
- dice
- Scenari
- Scienze
- Cerca
- segmento
- segmenti
- gravemente
- ha mostrato
- situazione
- SIX
- So
- Soft
- piuttosto
- specifico
- stabile
- dritto
- stress
- Studio
- tale
- sistema
- SISTEMI DI TRATTAMENTO
- prende
- presa
- obiettivi
- team
- che
- I
- loro
- Li
- Strumenti Bowman per analizzare le seguenti finiture:
- questo
- a
- top
- verso
- transizioni
- prova
- TURNO
- seconda
- Università
- uso
- utilizzando
- varietà
- Veicoli
- via
- Visualizza
- a piedi
- WELL
- sono stati
- quale
- OMS
- largo
- Vasta gamma
- con
- senza
- Lavora
- lavoro
- sarebbe
- zefiro
Di più da Nanowerk


Integrazione basata su origami di robot che percepiscono, decidono e rispondono
Nodo di origine: 2565107
Timestamp: APRILE 4, 2023
Eterostrutture a base di perovskite bidimensionali/quasi bidimensionali: costruzione, proprietà e applicazioni
Nodo di origine: 1938788
Timestamp: Febbraio 3, 2023

Svelato il processo di scissione dell'acqua ad alta efficienza
Nodo di origine: 1949683
Timestamp: Febbraio 10, 2023
I ricercatori descrivono in dettaglio proprietà mai viste prima in una famiglia di metalli Kagome superconduttori
Nodo di origine: 1952937
Timestamp: Febbraio 11, 2023
I circuiti fotonici integrati potrebbero aiutare a colmare il "gap terahertz"
Nodo di origine: 1899339
Timestamp: Gennaio 14, 2023

Le emissioni di carbonio dei fertilizzanti potrebbero essere ridotte fino all'80% entro il 2050
Nodo di origine: 1951214
Timestamp: Febbraio 11, 2023
Nuovi ferroelettrici per una microelettronica più efficiente
Nodo di origine: 2716345
Timestamp: 9 giugno 2023
Come un nanocatalizzatore di rame da record converte la CO2 in combustibili liquidi
Nodo di origine: 1961058
Timestamp: Febbraio 16, 2023
I ricercatori stampano in 3D il tessuto cerebrale umano funzionale
Nodo di origine: 3093799
Timestamp: Febbraio 2, 2024
Sviluppare tecnologie per ridurre il costo della produzione di idrogeno verde
Nodo di origine: 2700260
Timestamp: 2 giugno 2023
Svelare i segreti dello spin con le sonde ad alta armonica
Nodo di origine: 2969974
Timestamp: Novembre 10, 2023