29 Mei 2023 (Berita Nanowerk) Para peneliti dari Departemen Ilmu Mekanik dan Bioteknologi di Universitas Osaka telah menemukan robot berjalan jenis baru yang memanfaatkan ketidakstabilan dinamis untuk bernavigasi. Dengan mengubah fleksibilitas kopling, robot dapat dibuat berputar tanpa memerlukan sistem kontrol komputasi yang rumit. Pekerjaan ini dapat membantu terciptanya robot penyelamat yang mampu melintasi medan yang tidak rata.
Sebagian besar hewan di Bumi telah mengembangkan sistem penggerak yang kuat menggunakan kaki yang memberi mereka mobilitas tingkat tinggi di berbagai lingkungan. Agak mengecewakan, para insinyur yang mencoba meniru pendekatan ini sering kali menemukan bahwa robot berkaki ternyata sangat rapuh. Patahnya satu kaki saja karena tekanan yang berulang-ulang dapat sangat membatasi kemampuan robot untuk berfungsi.
Selain itu, mengendalikan sejumlah besar sambungan agar robot dapat melintasi lingkungan yang kompleks memerlukan banyak daya komputer. Perbaikan pada desain ini akan sangat berguna untuk membangun robot otonom atau semi-otonom yang dapat bertindak sebagai kendaraan eksplorasi atau penyelamatan dan memasuki area berbahaya.
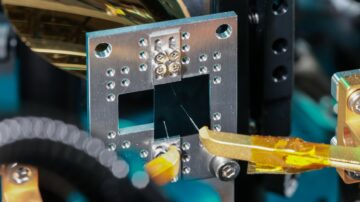
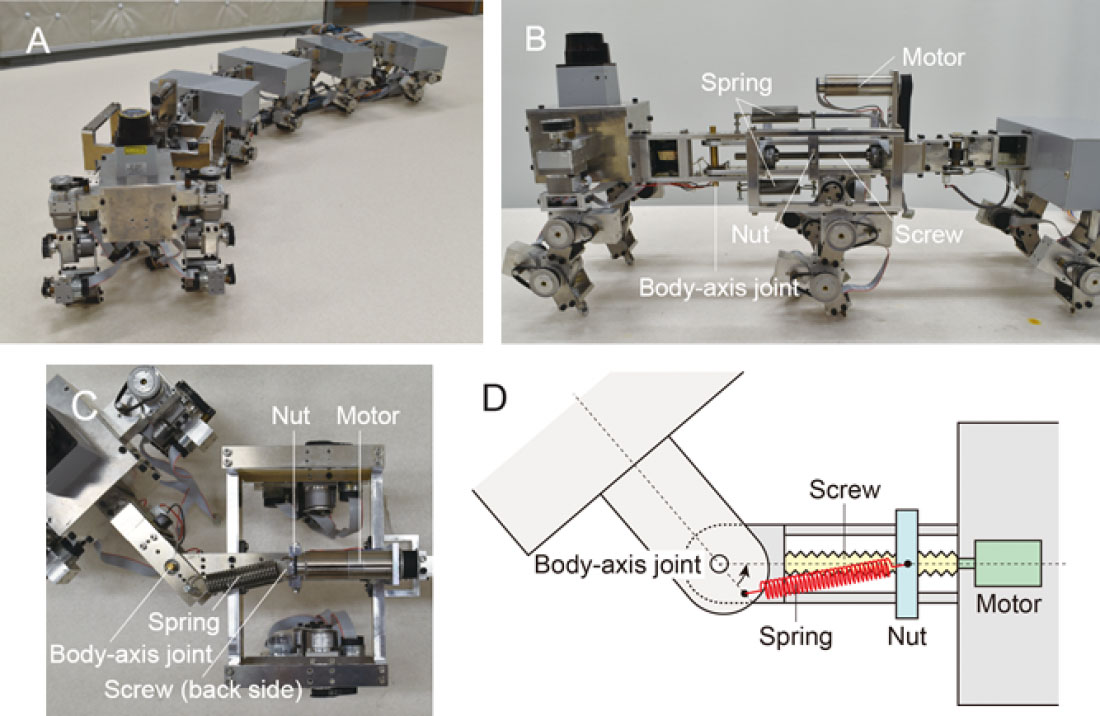 Robot Myriapod (A) dan mekanisme kelenturan sumbu tubuh variabel (B. Tampak depan, C. Tampak atas, D. Skema tampak atas). (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Kini, para peneliti dari Universitas Osaka telah mengembangkan robot biomimetik “myriapod” yang memanfaatkan ketidakstabilan alami yang dapat mengubah jalan lurus menjadi gerakan melengkung. Dalam sebuah penelitian yang diterbitkan baru-baru ini di Robotika Lunak (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), peneliti dari Universitas Osaka mendeskripsikan robot mereka, yang terdiri dari enam segmen (dengan dua kaki terhubung ke setiap segmen) dan sambungan fleksibel. Dengan menggunakan sekrup yang dapat disesuaikan, fleksibilitas kopling dapat dimodifikasi dengan motor selama gerakan berjalan.
Para peneliti menunjukkan bahwa peningkatan fleksibilitas sendi menyebabkan situasi yang disebut “bifurkasi garpu rumput,” di mana jalan lurus menjadi tidak stabil. Sebaliknya, robot bertransisi berjalan dalam pola melengkung, ke kanan atau ke kiri. Biasanya, para insinyur akan berusaha menghindari terciptanya ketidakstabilan. Namun, penggunaan yang terkendali dapat memungkinkan kemampuan manuver yang efisien.
“Kami terinspirasi oleh kemampuan serangga tertentu yang sangat lincah yang memungkinkan mereka mengendalikan ketidakstabilan dinamis dalam gerakan mereka sendiri untuk mendorong perubahan gerakan dengan cepat,” kata Shinya Aoi, penulis studi tersebut. Karena pendekatan ini tidak secara langsung mengarahkan pergerakan sumbu tubuh, namun mengontrol fleksibilitas, pendekatan ini dapat sangat mengurangi kompleksitas komputasi dan juga kebutuhan energi.
Robot Myriapod (A) dan mekanisme kelenturan sumbu tubuh variabel (B. Tampak depan, C. Tampak atas, D. Skema tampak atas). (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Kini, para peneliti dari Universitas Osaka telah mengembangkan robot biomimetik “myriapod” yang memanfaatkan ketidakstabilan alami yang dapat mengubah jalan lurus menjadi gerakan melengkung. Dalam sebuah penelitian yang diterbitkan baru-baru ini di Robotika Lunak (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), peneliti dari Universitas Osaka mendeskripsikan robot mereka, yang terdiri dari enam segmen (dengan dua kaki terhubung ke setiap segmen) dan sambungan fleksibel. Dengan menggunakan sekrup yang dapat disesuaikan, fleksibilitas kopling dapat dimodifikasi dengan motor selama gerakan berjalan.
Para peneliti menunjukkan bahwa peningkatan fleksibilitas sendi menyebabkan situasi yang disebut “bifurkasi garpu rumput,” di mana jalan lurus menjadi tidak stabil. Sebaliknya, robot bertransisi berjalan dalam pola melengkung, ke kanan atau ke kiri. Biasanya, para insinyur akan berusaha menghindari terciptanya ketidakstabilan. Namun, penggunaan yang terkendali dapat memungkinkan kemampuan manuver yang efisien.
“Kami terinspirasi oleh kemampuan serangga tertentu yang sangat lincah yang memungkinkan mereka mengendalikan ketidakstabilan dinamis dalam gerakan mereka sendiri untuk mendorong perubahan gerakan dengan cepat,” kata Shinya Aoi, penulis studi tersebut. Karena pendekatan ini tidak secara langsung mengarahkan pergerakan sumbu tubuh, namun mengontrol fleksibilitas, pendekatan ini dapat sangat mengurangi kompleksitas komputasi dan juga kebutuhan energi.
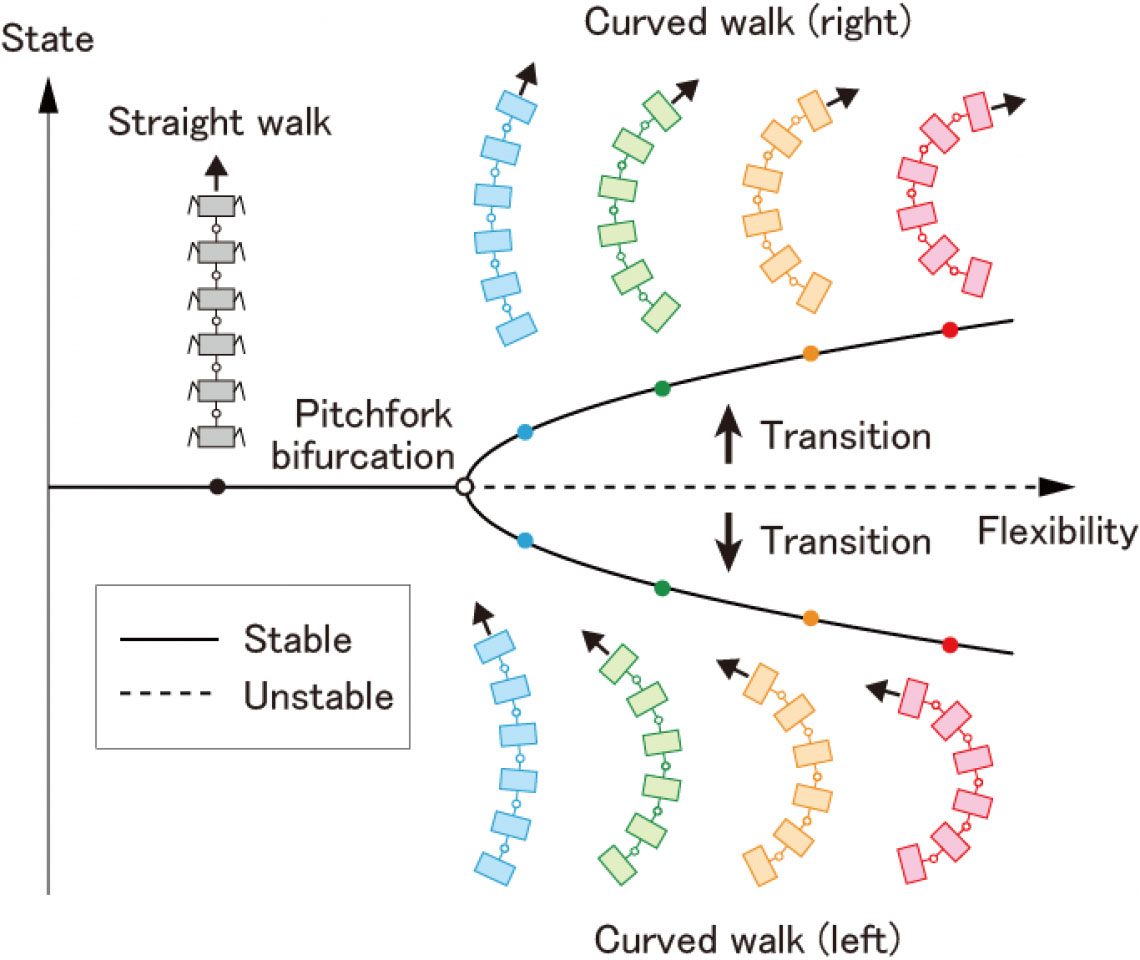 Pola berjalan yang stabil dan tidak stabil tergantung pada kelenturan sumbu tubuh. (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Tim menguji kemampuan robot untuk mencapai lokasi tertentu dan menemukan bahwa robot dapat bernavigasi dengan mengambil jalur melengkung menuju target. “Kami dapat memperkirakan penerapannya dalam berbagai skenario, seperti pencarian dan penyelamatan, bekerja di lingkungan berbahaya, atau eksplorasi di planet lain,” kata Mau Adachi, penulis studi lainnya. Versi mendatang mungkin mencakup segmen tambahan dan mekanisme kontrol.
Pola berjalan yang stabil dan tidak stabil tergantung pada kelenturan sumbu tubuh. (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Tim menguji kemampuan robot untuk mencapai lokasi tertentu dan menemukan bahwa robot dapat bernavigasi dengan mengambil jalur melengkung menuju target. “Kami dapat memperkirakan penerapannya dalam berbagai skenario, seperti pencarian dan penyelamatan, bekerja di lingkungan berbahaya, atau eksplorasi di planet lain,” kata Mau Adachi, penulis studi lainnya. Versi mendatang mungkin mencakup segmen tambahan dan mekanisme kontrol.
Robot Myriapod (A) dan mekanisme kelenturan sumbu tubuh variabel (B. Tampak depan, C. Tampak atas, D. Skema tampak atas). (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Kini, para peneliti dari Universitas Osaka telah mengembangkan robot biomimetik “myriapod” yang memanfaatkan ketidakstabilan alami yang dapat mengubah jalan lurus menjadi gerakan melengkung. Dalam sebuah penelitian yang diterbitkan baru-baru ini di Robotika Lunak (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), peneliti dari Universitas Osaka mendeskripsikan robot mereka, yang terdiri dari enam segmen (dengan dua kaki terhubung ke setiap segmen) dan sambungan fleksibel. Dengan menggunakan sekrup yang dapat disesuaikan, fleksibilitas kopling dapat dimodifikasi dengan motor selama gerakan berjalan.
Para peneliti menunjukkan bahwa peningkatan fleksibilitas sendi menyebabkan situasi yang disebut “bifurkasi garpu rumput,” di mana jalan lurus menjadi tidak stabil. Sebaliknya, robot bertransisi berjalan dalam pola melengkung, ke kanan atau ke kiri. Biasanya, para insinyur akan berusaha menghindari terciptanya ketidakstabilan. Namun, penggunaan yang terkendali dapat memungkinkan kemampuan manuver yang efisien.
“Kami terinspirasi oleh kemampuan serangga tertentu yang sangat lincah yang memungkinkan mereka mengendalikan ketidakstabilan dinamis dalam gerakan mereka sendiri untuk mendorong perubahan gerakan dengan cepat,” kata Shinya Aoi, penulis studi tersebut. Karena pendekatan ini tidak secara langsung mengarahkan pergerakan sumbu tubuh, namun mengontrol fleksibilitas, pendekatan ini dapat sangat mengurangi kompleksitas komputasi dan juga kebutuhan energi.
Pola berjalan yang stabil dan tidak stabil tergantung pada kelenturan sumbu tubuh. (Gambar: CC BY-NC, 2023, Aoi dkk., Soft Robotics)
Tim menguji kemampuan robot untuk mencapai lokasi tertentu dan menemukan bahwa robot dapat bernavigasi dengan mengambil jalur melengkung menuju target. “Kami dapat memperkirakan penerapannya dalam berbagai skenario, seperti pencarian dan penyelamatan, bekerja di lingkungan berbahaya, atau eksplorasi di planet lain,” kata Mau Adachi, penulis studi lainnya. Versi mendatang mungkin mencakup segmen tambahan dan mekanisme kontrol.
- Konten Bertenaga SEO & Distribusi PR. Dapatkan Amplifikasi Hari Ini.
- PlatoAiStream. Kecerdasan Data Web3. Pengetahuan Diperkuat. Akses Di Sini.
- Mencetak Masa Depan bersama Adryenn Ashley. Akses Di Sini.
- Beli dan Jual Saham di Perusahaan PRE-IPO dengan PREIPO®. Akses Di Sini.
- Sumber: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :bukan
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- kemampuan
- Sanggup
- Bertindak
- tambahan
- Tambahan
- disesuaikan
- Keuntungan
- tangkas
- AL
- memungkinkan
- an
- dan
- hewan
- Lain
- aplikasi
- pendekatan
- ADALAH
- daerah
- AS
- membantu
- At
- berusaha
- penulis
- otonom
- menghindari
- Sumbu
- BE
- karena
- menjadi
- tubuh
- kedua
- Kerusakan
- Bangunan
- tapi
- by
- bernama
- CAN
- pusat
- tertentu
- Perubahan
- mengubah
- kompleks
- kompleksitas
- komputer
- kekuatan komputer
- terhubung
- kontrol
- dikendalikan
- mengendalikan
- kontrol
- mengubah
- bisa
- membuat
- penciptaan
- Berbahaya
- Tanggal
- Derajat
- Departemen
- Tergantung
- menggambarkan
- Mendesain
- dikembangkan
- langsung
- tidak
- dua
- selama
- dinamis
- E&T
- setiap
- bumi
- efisien
- antara
- aktif
- energi
- Insinyur
- Enter
- lingkungan
- Bahkan
- berkembang
- eksplorasi
- sangat
- keluwesan
- fleksibel
- Untuk
- ditemukan
- dari
- depan
- fungsi
- masa depan
- Go
- sangat
- Memiliki
- High
- Namun
- HTTPS
- gambar
- perbaikan
- in
- memasukkan
- meningkatkan
- terinspirasi
- ketidakstabilan
- sebagai gantinya
- ke
- Jadian
- Penyidik
- IT
- jpg
- Jenis
- besar
- Dipimpin
- meninggalkan
- kaki
- MEMBATASI
- lokasi
- Lot
- terbuat
- Membuat
- Mungkin..
- mekanis
- mekanisme
- mekanisme
- Tengah
- mobilitas
- dimodifikasi
- paling
- gerakan
- motor
- gerakan
- Alam
- Arahkan
- Perlu
- New
- biasanya
- sekarang
- jumlah
- of
- sering
- on
- ONE
- or
- Lainnya
- lebih
- sendiri
- pola
- pola
- Planet
- plato
- Kecerdasan Data Plato
- Data Plato
- kekuasaan
- menyediakan
- diterbitkan
- Cepat
- jarak
- agak
- mencapai
- baru-baru ini
- menurunkan
- ulang
- Persyaratan
- membutuhkan
- menyelamatkan
- peneliti
- benar
- robot
- robotika
- robot
- kuat
- mengatakan
- skenario
- Ilmu
- Pencarian
- ruas
- segmen
- sangat parah
- menunjukkan
- situasi
- ENAM
- So
- Lunak
- agak
- tertentu
- stabil
- lurus
- tekanan
- Belajar
- seperti itu
- sistem
- sistem
- Dibutuhkan
- pengambilan
- target
- tim
- bahwa
- Grafik
- mereka
- Mereka
- Ini
- ini
- untuk
- puncak
- terhadap
- transisi
- mencoba
- MENGHIDUPKAN
- dua
- universitas
- menggunakan
- menggunakan
- variasi
- Kendaraan
- melalui
- View
- berjalan
- BAIK
- adalah
- yang
- SIAPA
- lebar
- Rentang luas
- dengan
- tanpa
- Kerja
- kerja
- akan
- zephyrnet.dll
Lebih dari Nanowerk


Integrasi robot berbasis Origami yang merasakan, memutuskan, dan merespons
Node Sumber: 2565107
Stempel Waktu: April 4, 2023
Heterostruktur berbasis perovskit dua / kuasi-dua dimensi: Konstruksi, properti, dan aplikasi
Node Sumber: 1938788
Stempel Waktu: Februari 3, 2023

Proses pemisahan air dengan efisiensi tinggi terungkap
Node Sumber: 1949683
Stempel Waktu: Februari 10, 2023
Para peneliti merinci sifat-sifat yang belum pernah dilihat sebelumnya dalam keluarga logam Kagome superkonduktor
Node Sumber: 1952937
Stempel Waktu: Februari 11, 2023
Sirkuit fotonik terintegrasi dapat membantu menutup 'celah terahertz'
Node Sumber: 1899339
Stempel Waktu: Jan 14, 2023

Emisi karbon dari pupuk dapat dikurangi sebanyak 80% pada tahun 2050
Node Sumber: 1951214
Stempel Waktu: Februari 11, 2023
Feroelektrik baru untuk mikroelektronika yang lebih efisien
Node Sumber: 2716345
Stempel Waktu: Juni 9, 2023
Bagaimana nanokatalis tembaga pemecah rekor mengubah CO2 menjadi bahan bakar cair
Node Sumber: 1961058
Stempel Waktu: Februari 16, 2023
Peneliti mencetak 3D jaringan otak manusia yang berfungsi
Node Sumber: 3093799
Stempel Waktu: Februari 2, 2024
Mengembangkan teknologi untuk mengurangi biaya produksi hidrogen hijau
Node Sumber: 2700260
Stempel Waktu: Juni 2, 2023
Mengungkap rahasia putaran dengan probe harmonik tinggi
Node Sumber: 2969974
Stempel Waktu: November 10, 2023