Postingan singkat ini menjelaskan beberapa peningkatan stasiun laser yang kami buat agar dapat menjalankan eksperimen kami dari jarak jauh.
Masalah pengaturan
Platform injeksi kesalahan laser kami terbuat dari mikroskop yang digunakan untuk memfokuskan sumber laser ke perangkat yang sedang diuji. Dilengkapi dengan kamera inframerah untuk mengamati arsitektur internal chip yang ditargetkan, dan menyesuaikan bentuk sinar laser. Untungnya, ia dilengkapi dengan panggung bermotor yang memungkinkan pergerakan sinar laser melintasi chip dari aplikasi perangkat lunak khusus kami. Semua alat yang kami kembangkan berjalan pada sistem operasi Linux, dan oleh karena itu dimungkinkan untuk menggunakannya melalui koneksi SSH, asalkan Anda memiliki koneksi internet yang baik. Kami menghadapi beberapa masalah latensi saat berhubungan dengan gambar langsung kamera mikroskop, yang segera kami atasi dengan mengaktifkan opsi kompresi SSH (-C) yang tidak diaktifkan secara default dan sangat mengurangi bandwidth streaming yang diperlukan. Meskipun demikian, pada saat itu beberapa elemen masih memerlukan intervensi in situ:
- Mengontrol sumber cahaya kamera: peralatan khusus menyediakan cahaya inframerah untuk menerangi chip untuk visualisasi kamera.
- Membuka atau menutup rana kamera mekanis: rana ini merupakan bagian dari mikroskop dan harus ditutup saat menggunakan laser.
- Mengubah tujuan mikroskop: 4 tujuan optik berbeda dipasang pada menara berputar mekanis dan memungkinkan perbesaran mikroskop yang berbeda.
Di bawah ini dijelaskan secara rinci bagaimana kami menyesuaikan bangku pengujian kami untuk mengontrol rana dan sumber cahaya dari jarak jauh. Secara khusus, kami ingin membatasi biaya adaptasi tersebut, dan menyediakannya sesegera mungkin.
Mengontrol sumber cahaya
Substrat silikon semikonduktor bersifat semi-transparan terhadap cahaya inframerah, dan dengan kamera inframerah, struktur internal sirkuit dapat diamati. Agar pengamatan dapat dilakukan, rangkaian harus disinari dengan sumber cahaya inframerah. Mikroskop laser kami dikirimkan dengan peralatan sumber cahaya khusus, a Hayashi LA-150CE, yang memiliki saklar daya dan kenop untuk mengatur intensitas cahaya, seperti gambar di bawah ini. Saat kampanye pengujian laser dimulai, kami biasanya mematikan sumber cahaya karena dapat mengganggu komponen, terutama saat sampel diencerkan.

Melihat bagian belakang peralatan, kami menemukan sakelar “jarak jauh” dan konektor eksternal tersedia. Kami memahami bahwa sumber cahaya ini menawarkan kemampuan kendali jarak jauh melalui konektor milenium terakhir. Sedikit dokumentasi yang dapat ditemukan di web, tetapi kami mengidentifikasi dalam katalog Hayashi terdapat a Unit Kontrol LAN kompatibel dengan sumber cahaya ini. Namun produk ini dihentikan. Selain itu, konektivitas LAN sangat tidak nyaman. Dalam katalog yang sama, kami menemukan spesifikasi konektor sumber cahaya. Meskipun tidak terlalu detail, itu sudah cukup untuk mencobanya.
Pinout kendali jarak jauh dari katalog produk Hayashi: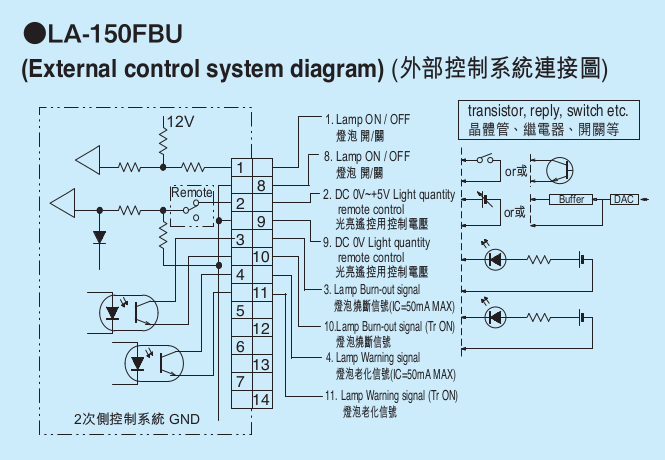
Antarmuka ini menyediakan dua fitur utama yang menarik:
- Pin digital 1 dan 8 dapat digunakan untuk menghidupkan dan mematikan lampu dengan cara korsleting atau tidak. Pin 8 sebenarnya adalah ground, jadi hanya pin 1 yang benar-benar relevan.
- Pin analog 2 mengontrol intensitas cahaya dengan sinyal mulai dari 0 V (intensitas minimum) hingga 5 V (intensitas maksimum). Ketika mode jarak jauh diaktifkan, potensiometer panel depan dilewati dan intensitas cahaya dikontrol langsung oleh pin ini.
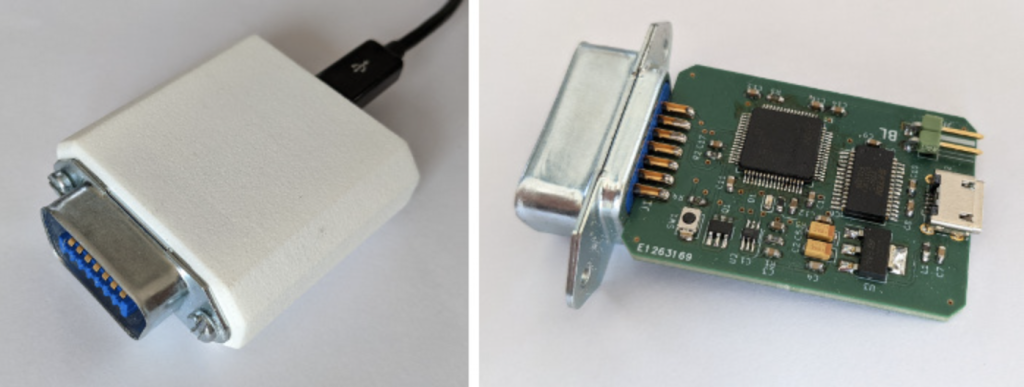
Kami memutuskan untuk membangun milik kami sendiri dari awal Pengendali Jarak Jauh Cahaya Hayashi menggunakan bagian berikut:
- Mikrokontroler STM32 untuk menampung kode aplikasi yang tertanam,
- Konverter USB-ke-serial FT232 untuk memungkinkan pengontrolan dongle dari USB,
- Konverter Digital-ke-Analog AD5621B untuk pembangkitan sinyal analog 0 hingga 5V untuk mengontrol intensitas cahaya.
Kami merancang PCB menggunakan KiCad. Sejujurnya, desain ini mungkin agak terlalu besar: mikrokontroler terlalu besar untuk kebutuhan saat ini, dan FT232 mungkin dihapus karena perangkat STM32 sudah memiliki kemampuan USB, dengan mengorbankan waktu pengembangan perangkat lunak. Tujuan kami adalah membuatnya cepat dan kotor serta menggunakan kembali beberapa skema yang sudah kami rancang.
Untuk bersenang-senang, dan karena kami yakin ini adalah bahasa yang sangat menjanjikan, kami mengembangkan firmware mikrokontroler di Rust.
Kami akhirnya merancang kandang plastik sederhana menggunakan FreeCAD, dan mencetaknya dengan patung.
Tanpa diduga, bagian tersulit dari proyek ini adalah mengidentifikasi konektornya (referensi 5710140 dari Amphenol untuk sisi pria), dan juga membelinya karena sudah usang dan tidak dijual lagi oleh banyak pemasok. Mesin pencari pemasok suku cadang bagian gurita dapat membantu.
Semua skema dan file desain tersedia di kami Repositori GitHub.
Mengontrol rana kamera
Di mikroskop, sinar laser dan kamera berbagi jalur optik yang sama. Saat laser memotret, sebagian kecil cahayanya dipantulkan oleh silikon dan akan mengenai kamera. Untuk mencegah kerusakan sensor yang dapat mengakibatkan piksel mati dalam jangka panjang, rana mekanis optik di depan kamera dapat ditutup. Rana bersifat manual dan memerlukan sedikit atau tanpa tenaga untuk digerakkan.
Untuk memungkinkan kendali jarak jauh, kami membeli motor stepper kecil dan a Pengontrol Motor Stepper TIC T834 dari Polulu. Kami mengembangkan dan mencetak roda gigi 3D dan badan untuk dipasang pada mikroskop, untuk menggerakkan penutup dengan motor.
TIC T834 memerlukan sumber listrik untuk menyediakan energi ke motor, namun karena motor kami tidak menarik banyak arus, kami melakukan hubungan arus pendek pada catu daya USB T834 untuk memberi daya pada motor juga. Pengontrol TIC sangat mudah diatur dan digunakan, didokumentasikan dengan baik dan kami hanya memerlukan sedikit waktu untuk mengontrol motor dari perangkat lunak kami. Kami mengembangkan kelas pengontrol kecil dengan Python yang sekarang terintegrasi di kelas kami tahap Perpustakaan.
Pengontrol motor stepper perlu mengetahui posisi motor saat ini ketika dihidupkan. Hal ini dilakukan dengan prosedur inisialisasi dimana motor akan berputar hingga saklar kontak memberitahukan pengontrol bahwa motor berada pada posisi nol. Kami menggunakan saklar sederhana yang terhubung langsung ke T834 yang memiliki fitur ini di dalamnya.
Bagian bodi 3D yang kami cetak tidak terlalu akurat dan kedua roda gigi tidak berfungsi dengan benar pada saat pertama. Dengan menggunakan panas, kita dapat sedikit membengkokkan bagian plastik untuk memperbaiki celah antar roda gigi. Setelah beberapa penyesuaian, kami dapat membuka dan menutup rana kamera dari jarak jauh dengan sempurna!
Desain mekanis tersedia di kami Repositori GitHub.
Pesan terakhir
Mengintegrasikan kontrol sumber cahaya dan penutup kamera memungkinkan kami menjalankan banyak kampanye pengujian laser dari jarak jauh. Hal ini juga lebih nyaman dibandingkan sebelumnya, karena menutup rana dan mematikan lampu kini dapat dilakukan secara otomatis saat laser dihidupkan, padahal sebelumnya memerlukan intervensi fisik manusia dan dapat dengan mudah dilupakan.
Mengenai pengendalian turret objektif, sudah ada turret bermotor, namun sayangnya harganya cukup mahal, dan mungkin sulit untuk diganti. Untuk saat ini, kami belum menemukan solusi yang sederhana dan berbiaya rendah. Memutar turret dengan motor eksternal sulit dilakukan, terutama karena terdapat pegas yang mengunci turret pada tempatnya saat lensa objektif disejajarkan dengan mikroskop. Selain itu, bobot yang dapat kita tambahkan ke panggung bermotor juga terbatas. Ini masih menjadi masalah terbuka saat ini, namun tidak menghalangi bekerja dari jarak jauh, kami hanya dibatasi pada perbesaran yang dipilih.
Terakhir, penggantian sampel yang rusak masih memerlukan akses ke laboratorium. Untungnya, hal ini tidak terjadi terlalu sering. Kami pada akhirnya dapat melakukan multipleks pada banyak sirkuit pada satu daughterboard, sehingga kami dapat membakar beberapa perangkat sebelum memerlukan penggantian fisik, namun kami tidak mengembangkan solusi seperti itu.

- Konten Bertenaga SEO & Distribusi PR. Dapatkan Amplifikasi Hari Ini.
- PlatoAiStream. Kecerdasan Data Web3. Pengetahuan Diperkuat. Akses Di Sini.
- Mencetak Masa Depan bersama Adryenn Ashley. Akses Di Sini.
- Beli dan Jual Saham di Perusahaan PRE-IPO dengan PREIPO®. Akses Di Sini.
- Sumber: https://www.ledger.com/blog/laser-improvements
- :memiliki
- :adalah
- :bukan
- :Di mana
- 1
- 14
- 24
- 3d
- 8
- a
- Sanggup
- mengakses
- tepat
- di seluruh
- sebenarnya
- Adaptasi
- menambahkan
- penyesuaian
- Setelah
- selaras
- Semua
- mengizinkan
- memungkinkan
- sudah
- juga
- an
- dan
- Apa pun
- lagi
- Aplikasi
- arsitektur
- ADALAH
- AS
- At
- secara otomatis
- tersedia
- Bandwidth
- BE
- Balok
- karena
- sebelum
- Percaya
- di bawah
- antara
- Besar
- Bit
- tubuh
- membeli
- Rusak
- membangun
- built-in
- membakar
- tapi
- by
- kamar
- Kampanye
- Kampanye
- CAN
- kemampuan
- katalog
- keping
- kelas
- Penyelesaian
- tertutup
- penutupan
- kode
- cocok
- komponen
- terhubung
- koneksi
- Konektivitas
- kontak
- kontrol
- dikendalikan
- pengawas
- mengendalikan
- kontrol
- Mudah
- benar
- Biaya
- bisa
- terbaru
- adat
- disesuaikan
- mati
- berurusan
- memutuskan
- dedicated
- Default
- Mendesain
- dirancang
- terperinci
- mengembangkan
- dikembangkan
- Pengembangan
- alat
- Devices
- MELAKUKAN
- berbeda
- sulit
- langsung
- dokumentasi
- tidak
- dilakukan
- turun
- seri
- selama
- mudah
- Mudah
- elemen
- tertanam
- diaktifkan
- energi
- Perangkat tambahan
- cukup
- peralatan
- lengkap
- terutama
- akhirnya
- ada
- ada
- mahal
- eksperimen
- luar
- dihadapi
- kesalahan
- Fitur
- Fitur
- beberapa
- File
- Akhirnya
- Menemukan
- Pertama
- pertama kali
- Fokus
- berikut
- Untuk
- kekuatan
- terlupakan
- Untung
- ditemukan
- pecahan
- dari
- depan
- kesenangan
- celah
- generasi
- tujuan
- baik
- sangat
- Tanah
- terjadi
- Sulit
- Memiliki
- membantu
- Memukul
- tuan rumah
- Seterpercayaapakah Olymp Trade? Kesimpulan
- Namun
- HTTPS
- manusia
- diidentifikasi
- mengidentifikasi
- gambar
- in
- terpadu
- menarik
- Antarmuka
- mengganggu
- intern
- Internet
- koneksi internet
- intervensi
- isu
- masalah
- IT
- hanya
- laboratorium
- bahasa
- laser
- Latensi
- masalah latensi
- Buku besar
- Perpustakaan
- cahaya
- MEMBATASI
- Terbatas
- linux
- sedikit
- hidup
- Kunci
- Panjang
- Lot
- murah
- terbuat
- Utama
- membuat
- Membuat
- panduan
- banyak
- max-width
- maksimum
- Mungkin..
- mekanis
- Mikroskop
- masa seribu tahun
- minimum
- mode
- saat
- lebih
- paling
- Motor
- pindah
- bergerak
- harus
- Perlu
- membutuhkan
- tidak
- sekarang
- tujuan
- target
- mengamati
- usang
- of
- lepas
- Penawaran
- sering
- on
- hanya
- Buka
- operasi
- sistem operasi
- pilihan
- or
- urutan
- kami
- di luar
- pandemi
- panel
- bagian
- tertentu
- bagian
- lalu
- path
- fisik
- pin
- Tempat
- plastik
- Platform
- plato
- Kecerdasan Data Plato
- Data Plato
- posisi
- mungkin
- Pos
- kekuasaan
- Sumber Daya listrik
- didukung
- mencegah
- Produk
- Produk
- proyek
- menjanjikan
- memberikan
- disediakan
- menyediakan
- membeli
- Ular sanca
- Cepat
- segera
- mulai
- benar-benar
- mengurangi
- tercermin
- relevan
- terpencil
- Dihapus
- menggantikan
- penggantian
- wajib
- membutuhkan
- mengakibatkan
- menggunakan kembali
- Run
- Karat
- sama
- Pencarian
- terpilih
- Semikonduktor
- penyiapan
- Bentuknya
- Share
- dikirimkan
- penembakan
- Pendek
- Korsleting
- Korslet
- sisi
- Sinyal
- Silikon
- Sederhana
- sejak
- tunggal
- kecil
- So
- Perangkat lunak
- pengembangan perangkat lunak
- terjual
- larutan
- beberapa
- Segera
- sumber
- spesifikasi
- Berputar
- musim semi
- Tahap
- mulai
- stasiun
- Masih
- STM32
- Streaming
- struktur
- seperti itu
- pemasok
- menyediakan
- Beralih
- sistem
- ditargetkan
- mengatakan
- uji
- pengujian
- dari
- bahwa
- Grafik
- Mereka
- Sana.
- karena itu
- mereka
- ini
- itu
- meskipun?
- Melalui
- waktu
- untuk
- terlalu
- mengambil
- alat
- mencoba
- Berbalik
- Putar
- dua
- bawah
- dipahami
- sayangnya
- sampai
- us
- usb
- menggunakan
- bekas
- menggunakan
- biasanya
- sangat
- visualisasi
- ingin
- adalah
- we
- jaringan
- berat
- BAIK
- adalah
- ketika
- yang
- akan
- dengan
- kerja
- bekerja dari jarak jauh
- namun
- kamu
- zephyrnet.dll
- nol