03 Mei 2023 (Berita Nanowerk) Sejak istilah “robot lunak” diadopsi pada tahun 2008, para insinyur di bidangnya telah membangun beragam representasi mesin fleksibel yang berguna dalam eksplorasi, penggerak, rehabilitasi, dan bahkan luar angkasa. Salah satu sumber inspirasi: cara hewan bergerak di alam liar. Sebuah tim peneliti MIT telah mengambil langkah lebih jauh dengan mengembangkan hal ini Kebun Binatang Lembut, sebuah platform yang terinspirasi oleh bio yang memungkinkan para insinyur mempelajari desain bersama robot lunak. Kerangka kerja ini mengoptimalkan algoritma yang terdiri dari desain, yang menentukan seperti apa robot itu nantinya; dan kontrol, atau sistem yang memungkinkan gerakan robot, meningkatkan cara pengguna secara otomatis menghasilkan garis besar untuk mesin potensial.
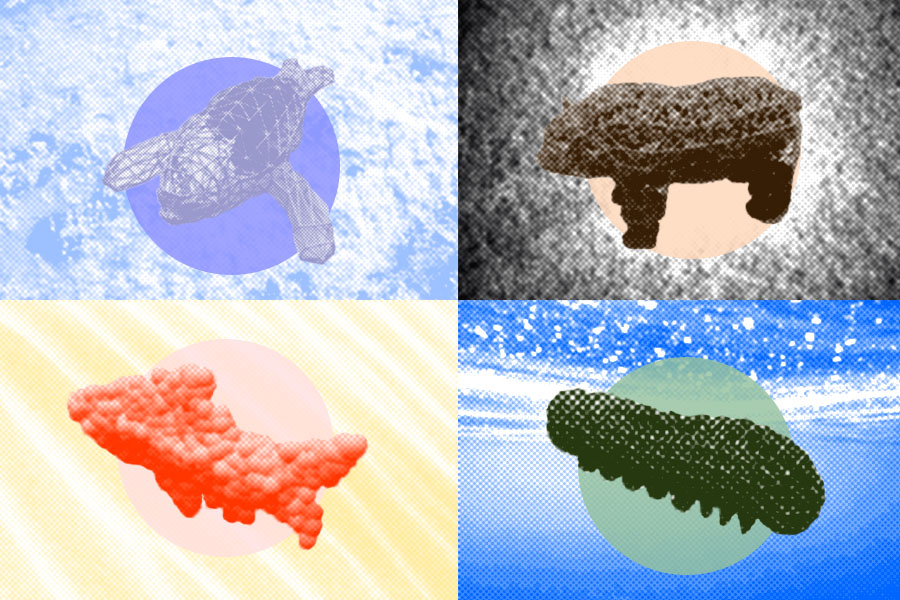 Para peneliti mengembangkan sistem untuk desain bersama robot lunak, yang berarti bersama-sama mencari dan mengoptimalkan desain robot – bentuk robot, di mana menempatkan otot di tubuh robot, seberapa lembut robot di berbagai bagian tubuh; dan berdasarkan desain robot, cara mengendalikannya untuk mencapai target tugas. (Gambar: Alex Shipps/MIT CSAIL dan para peneliti) Berjalan-jalan di alam liar, platform ini menampilkan model hewan 3-D seperti beruang panda, ikan, hiu, dan ulat sebagai desain yang dapat mensimulasikan tugas robotika lunak seperti penggerak , belokan lincah, dan mengikuti jalur di lingkungan yang berbeda. Baik di salju, gurun, tanah liat, atau air, platform ini menunjukkan kinerja yang seimbang dari berbagai desain di medan yang berbeda.
“Kerangka kerja kami dapat membantu pengguna menemukan konfigurasi terbaik untuk bentuk robot, memungkinkan mereka merancang algoritma robotika lunak yang dapat melakukan banyak hal berbeda,” kata mahasiswa PhD MIT Tsun-Hsuan Wang, afiliasi dari Laboratorium Ilmu Komputer dan Kecerdasan Buatan ( CSAIL) yang merupakan peneliti utama proyek tersebut. “Intinya, ini membantu kita memahami strategi terbaik bagi robot untuk berinteraksi dengan lingkungannya.” SoftZoo lebih komprehensif dibandingkan platform serupa, yang sudah mensimulasikan desain dan kontrol, karena memodelkan pergerakan yang bereaksi terhadap fitur fisik berbagai bioma. Fleksibilitas kerangka ini berasal dari mesin multifisika yang dapat dibedakan, yang memungkinkan simulasi beberapa aspek sistem fisik pada saat yang sama, seperti bayi anjing laut yang berputar di atas es atau ulat yang beringsut melintasi lingkungan lahan basah. Diferensiabilitas mesin mengoptimalkan desain bersama dengan mengurangi jumlah simulasi yang seringkali mahal yang diperlukan untuk memecahkan masalah kontrol komputasi dan desain. Hasilnya, pengguna dapat merancang dan menggerakkan robot lunak dengan algoritma tertentu yang lebih canggih.
Kemampuan sistem untuk mensimulasikan interaksi dengan medan yang berbeda menggambarkan pentingnya morfologi, cabang biologi yang mempelajari bentuk, ukuran, dan bentuk organisme yang berbeda. Tergantung pada lingkungannya, beberapa struktur biologis lebih optimal dibandingkan yang lain, seperti membandingkan cetak biru mesin yang menyelesaikan tugas serupa.
Garis besar biologis ini dapat menginspirasi kehidupan buatan yang lebih terspesialisasi dan spesifik pada medan tertentu. “Geometri ubur-ubur yang bergelombang memungkinkannya melakukan perjalanan secara efisien melintasi perairan yang luas, menginspirasi para peneliti untuk mengembangkan robot lunak generasi baru dan membuka kemungkinan tak terbatas tentang kemampuan makhluk buatan yang dibudidayakan seluruhnya dalam silico,” kata Wang. “Selain itu, capung dapat melakukan manuver yang sangat lincah yang tidak dapat dilakukan oleh makhluk terbang lainnya karena mereka memiliki struktur khusus pada sayapnya yang mengubah pusat massanya saat terbang. Platform kami mengoptimalkan pergerakan dengan cara yang sama seperti capung yang secara alami lebih mahir dalam bekerja di lingkungan sekitarnya.” Robot sebelumnya kesulitan menavigasi lingkungan yang berantakan karena tubuh mereka tidak sesuai dengan lingkungannya. Namun, dengan SoftZoo, para perancang dapat mengembangkan otak dan tubuh robot secara bersamaan, mengoptimalkan mesin darat dan air agar lebih sadar dan terspesialisasi. Dengan meningkatnya kecerdasan perilaku dan morfologi, robot akan lebih berguna dalam menyelesaikan misi penyelamatan dan melakukan eksplorasi. Misalnya, jika seseorang hilang saat banjir, robot tersebut berpotensi melintasi perairan dengan lebih efisien karena dioptimalkan menggunakan metode yang ditunjukkan pada platform SotftZoo.
“SoftZoo menyediakan simulasi sumber terbuka untuk perancang robot lunak, membantu mereka membangun robot dunia nyata dengan lebih mudah dan fleksibel sekaligus mempercepat kemampuan penggerak mesin di berbagai lingkungan,” tambah rekan penulis studi Chuang Gan, seorang ilmuwan riset di MIT -IBM Watson AI Lab yang akan segera menjadi asisten profesor di Universitas Massachusetts di Amherst.
“Pendekatan komputasi untuk merancang bersama tubuh robot lunak dan otaknya (yaitu pengontrolnya) membuka pintu untuk dengan cepat menciptakan mesin khusus yang dirancang untuk tugas tertentu,” tambah Daniela Rus, direktur CSAIL dan Andrew dan Erna Viterbi Profesor di Departemen Teknik Elektro dan Ilmu Komputer (EECS) MIT, yang merupakan penulis lain dari karya tersebut.
Sebelum robot jenis apa pun dibuat, kerangka tersebut dapat menjadi pengganti pengujian lapangan terhadap pemandangan yang tidak wajar. Misalnya, menilai perilaku robot mirip beruang di gurun mungkin merupakan tantangan bagi tim peneliti yang bekerja di dataran perkotaan Boston. Sebaliknya, insinyur robotika lunak dapat menggunakan model 3-D di SoftZoo untuk mensimulasikan desain yang berbeda dan mengevaluasi seberapa efektif algoritma yang mengendalikan robot mereka dalam navigasi. Pada gilirannya, hal ini akan menghemat waktu dan sumber daya peneliti.
Namun, keterbatasan teknik fabrikasi saat ini menghalangi terwujudnya desain robot lunak ini. “Transfer dari simulasi ke robot fisik masih belum terpecahkan dan memerlukan studi lebih lanjut,” kata Wang. “Model otot, kekakuan yang bervariasi secara spasial, dan sensorisasi di SoftZoo tidak dapat direalisasikan secara langsung dengan teknik fabrikasi saat ini, jadi kami sedang mengatasi tantangan ini.” Di masa depan, perancang platform sedang mengincar aplikasi dalam mekanika manusia, seperti manipulasi, mengingat kemampuannya untuk menguji kontrol robot. Untuk mendemonstrasikan potensi ini, tim Wang merancang lengan 3-D yang melemparkan bola salju ke depan.
Para peneliti mengembangkan sistem untuk desain bersama robot lunak, yang berarti bersama-sama mencari dan mengoptimalkan desain robot – bentuk robot, di mana menempatkan otot di tubuh robot, seberapa lembut robot di berbagai bagian tubuh; dan berdasarkan desain robot, cara mengendalikannya untuk mencapai target tugas. (Gambar: Alex Shipps/MIT CSAIL dan para peneliti) Berjalan-jalan di alam liar, platform ini menampilkan model hewan 3-D seperti beruang panda, ikan, hiu, dan ulat sebagai desain yang dapat mensimulasikan tugas robotika lunak seperti penggerak , belokan lincah, dan mengikuti jalur di lingkungan yang berbeda. Baik di salju, gurun, tanah liat, atau air, platform ini menunjukkan kinerja yang seimbang dari berbagai desain di medan yang berbeda.
“Kerangka kerja kami dapat membantu pengguna menemukan konfigurasi terbaik untuk bentuk robot, memungkinkan mereka merancang algoritma robotika lunak yang dapat melakukan banyak hal berbeda,” kata mahasiswa PhD MIT Tsun-Hsuan Wang, afiliasi dari Laboratorium Ilmu Komputer dan Kecerdasan Buatan ( CSAIL) yang merupakan peneliti utama proyek tersebut. “Intinya, ini membantu kita memahami strategi terbaik bagi robot untuk berinteraksi dengan lingkungannya.” SoftZoo lebih komprehensif dibandingkan platform serupa, yang sudah mensimulasikan desain dan kontrol, karena memodelkan pergerakan yang bereaksi terhadap fitur fisik berbagai bioma. Fleksibilitas kerangka ini berasal dari mesin multifisika yang dapat dibedakan, yang memungkinkan simulasi beberapa aspek sistem fisik pada saat yang sama, seperti bayi anjing laut yang berputar di atas es atau ulat yang beringsut melintasi lingkungan lahan basah. Diferensiabilitas mesin mengoptimalkan desain bersama dengan mengurangi jumlah simulasi yang seringkali mahal yang diperlukan untuk memecahkan masalah kontrol komputasi dan desain. Hasilnya, pengguna dapat merancang dan menggerakkan robot lunak dengan algoritma tertentu yang lebih canggih.
Kemampuan sistem untuk mensimulasikan interaksi dengan medan yang berbeda menggambarkan pentingnya morfologi, cabang biologi yang mempelajari bentuk, ukuran, dan bentuk organisme yang berbeda. Tergantung pada lingkungannya, beberapa struktur biologis lebih optimal dibandingkan yang lain, seperti membandingkan cetak biru mesin yang menyelesaikan tugas serupa.
Garis besar biologis ini dapat menginspirasi kehidupan buatan yang lebih terspesialisasi dan spesifik pada medan tertentu. “Geometri ubur-ubur yang bergelombang memungkinkannya melakukan perjalanan secara efisien melintasi perairan yang luas, menginspirasi para peneliti untuk mengembangkan robot lunak generasi baru dan membuka kemungkinan tak terbatas tentang kemampuan makhluk buatan yang dibudidayakan seluruhnya dalam silico,” kata Wang. “Selain itu, capung dapat melakukan manuver yang sangat lincah yang tidak dapat dilakukan oleh makhluk terbang lainnya karena mereka memiliki struktur khusus pada sayapnya yang mengubah pusat massanya saat terbang. Platform kami mengoptimalkan pergerakan dengan cara yang sama seperti capung yang secara alami lebih mahir dalam bekerja di lingkungan sekitarnya.” Robot sebelumnya kesulitan menavigasi lingkungan yang berantakan karena tubuh mereka tidak sesuai dengan lingkungannya. Namun, dengan SoftZoo, para perancang dapat mengembangkan otak dan tubuh robot secara bersamaan, mengoptimalkan mesin darat dan air agar lebih sadar dan terspesialisasi. Dengan meningkatnya kecerdasan perilaku dan morfologi, robot akan lebih berguna dalam menyelesaikan misi penyelamatan dan melakukan eksplorasi. Misalnya, jika seseorang hilang saat banjir, robot tersebut berpotensi melintasi perairan dengan lebih efisien karena dioptimalkan menggunakan metode yang ditunjukkan pada platform SotftZoo.
“SoftZoo menyediakan simulasi sumber terbuka untuk perancang robot lunak, membantu mereka membangun robot dunia nyata dengan lebih mudah dan fleksibel sekaligus mempercepat kemampuan penggerak mesin di berbagai lingkungan,” tambah rekan penulis studi Chuang Gan, seorang ilmuwan riset di MIT -IBM Watson AI Lab yang akan segera menjadi asisten profesor di Universitas Massachusetts di Amherst.
“Pendekatan komputasi untuk merancang bersama tubuh robot lunak dan otaknya (yaitu pengontrolnya) membuka pintu untuk dengan cepat menciptakan mesin khusus yang dirancang untuk tugas tertentu,” tambah Daniela Rus, direktur CSAIL dan Andrew dan Erna Viterbi Profesor di Departemen Teknik Elektro dan Ilmu Komputer (EECS) MIT, yang merupakan penulis lain dari karya tersebut.
Sebelum robot jenis apa pun dibuat, kerangka tersebut dapat menjadi pengganti pengujian lapangan terhadap pemandangan yang tidak wajar. Misalnya, menilai perilaku robot mirip beruang di gurun mungkin merupakan tantangan bagi tim peneliti yang bekerja di dataran perkotaan Boston. Sebaliknya, insinyur robotika lunak dapat menggunakan model 3-D di SoftZoo untuk mensimulasikan desain yang berbeda dan mengevaluasi seberapa efektif algoritma yang mengendalikan robot mereka dalam navigasi. Pada gilirannya, hal ini akan menghemat waktu dan sumber daya peneliti.
Namun, keterbatasan teknik fabrikasi saat ini menghalangi terwujudnya desain robot lunak ini. “Transfer dari simulasi ke robot fisik masih belum terpecahkan dan memerlukan studi lebih lanjut,” kata Wang. “Model otot, kekakuan yang bervariasi secara spasial, dan sensorisasi di SoftZoo tidak dapat direalisasikan secara langsung dengan teknik fabrikasi saat ini, jadi kami sedang mengatasi tantangan ini.” Di masa depan, perancang platform sedang mengincar aplikasi dalam mekanika manusia, seperti manipulasi, mengingat kemampuannya untuk menguji kontrol robot. Untuk mendemonstrasikan potensi ini, tim Wang merancang lengan 3-D yang melemparkan bola salju ke depan.
Para peneliti mengembangkan sistem untuk desain bersama robot lunak, yang berarti bersama-sama mencari dan mengoptimalkan desain robot – bentuk robot, di mana menempatkan otot di tubuh robot, seberapa lembut robot di berbagai bagian tubuh; dan berdasarkan desain robot, cara mengendalikannya untuk mencapai target tugas. (Gambar: Alex Shipps/MIT CSAIL dan para peneliti) Berjalan-jalan di alam liar, platform ini menampilkan model hewan 3-D seperti beruang panda, ikan, hiu, dan ulat sebagai desain yang dapat mensimulasikan tugas robotika lunak seperti penggerak , belokan lincah, dan mengikuti jalur di lingkungan yang berbeda. Baik di salju, gurun, tanah liat, atau air, platform ini menunjukkan kinerja yang seimbang dari berbagai desain di medan yang berbeda.
“Kerangka kerja kami dapat membantu pengguna menemukan konfigurasi terbaik untuk bentuk robot, memungkinkan mereka merancang algoritma robotika lunak yang dapat melakukan banyak hal berbeda,” kata mahasiswa PhD MIT Tsun-Hsuan Wang, afiliasi dari Laboratorium Ilmu Komputer dan Kecerdasan Buatan ( CSAIL) yang merupakan peneliti utama proyek tersebut. “Intinya, ini membantu kita memahami strategi terbaik bagi robot untuk berinteraksi dengan lingkungannya.” SoftZoo lebih komprehensif dibandingkan platform serupa, yang sudah mensimulasikan desain dan kontrol, karena memodelkan pergerakan yang bereaksi terhadap fitur fisik berbagai bioma. Fleksibilitas kerangka ini berasal dari mesin multifisika yang dapat dibedakan, yang memungkinkan simulasi beberapa aspek sistem fisik pada saat yang sama, seperti bayi anjing laut yang berputar di atas es atau ulat yang beringsut melintasi lingkungan lahan basah. Diferensiabilitas mesin mengoptimalkan desain bersama dengan mengurangi jumlah simulasi yang seringkali mahal yang diperlukan untuk memecahkan masalah kontrol komputasi dan desain. Hasilnya, pengguna dapat merancang dan menggerakkan robot lunak dengan algoritma tertentu yang lebih canggih.
Kemampuan sistem untuk mensimulasikan interaksi dengan medan yang berbeda menggambarkan pentingnya morfologi, cabang biologi yang mempelajari bentuk, ukuran, dan bentuk organisme yang berbeda. Tergantung pada lingkungannya, beberapa struktur biologis lebih optimal dibandingkan yang lain, seperti membandingkan cetak biru mesin yang menyelesaikan tugas serupa.
Garis besar biologis ini dapat menginspirasi kehidupan buatan yang lebih terspesialisasi dan spesifik pada medan tertentu. “Geometri ubur-ubur yang bergelombang memungkinkannya melakukan perjalanan secara efisien melintasi perairan yang luas, menginspirasi para peneliti untuk mengembangkan robot lunak generasi baru dan membuka kemungkinan tak terbatas tentang kemampuan makhluk buatan yang dibudidayakan seluruhnya dalam silico,” kata Wang. “Selain itu, capung dapat melakukan manuver yang sangat lincah yang tidak dapat dilakukan oleh makhluk terbang lainnya karena mereka memiliki struktur khusus pada sayapnya yang mengubah pusat massanya saat terbang. Platform kami mengoptimalkan pergerakan dengan cara yang sama seperti capung yang secara alami lebih mahir dalam bekerja di lingkungan sekitarnya.” Robot sebelumnya kesulitan menavigasi lingkungan yang berantakan karena tubuh mereka tidak sesuai dengan lingkungannya. Namun, dengan SoftZoo, para perancang dapat mengembangkan otak dan tubuh robot secara bersamaan, mengoptimalkan mesin darat dan air agar lebih sadar dan terspesialisasi. Dengan meningkatnya kecerdasan perilaku dan morfologi, robot akan lebih berguna dalam menyelesaikan misi penyelamatan dan melakukan eksplorasi. Misalnya, jika seseorang hilang saat banjir, robot tersebut berpotensi melintasi perairan dengan lebih efisien karena dioptimalkan menggunakan metode yang ditunjukkan pada platform SotftZoo.
“SoftZoo menyediakan simulasi sumber terbuka untuk perancang robot lunak, membantu mereka membangun robot dunia nyata dengan lebih mudah dan fleksibel sekaligus mempercepat kemampuan penggerak mesin di berbagai lingkungan,” tambah rekan penulis studi Chuang Gan, seorang ilmuwan riset di MIT -IBM Watson AI Lab yang akan segera menjadi asisten profesor di Universitas Massachusetts di Amherst.
“Pendekatan komputasi untuk merancang bersama tubuh robot lunak dan otaknya (yaitu pengontrolnya) membuka pintu untuk dengan cepat menciptakan mesin khusus yang dirancang untuk tugas tertentu,” tambah Daniela Rus, direktur CSAIL dan Andrew dan Erna Viterbi Profesor di Departemen Teknik Elektro dan Ilmu Komputer (EECS) MIT, yang merupakan penulis lain dari karya tersebut.
Sebelum robot jenis apa pun dibuat, kerangka tersebut dapat menjadi pengganti pengujian lapangan terhadap pemandangan yang tidak wajar. Misalnya, menilai perilaku robot mirip beruang di gurun mungkin merupakan tantangan bagi tim peneliti yang bekerja di dataran perkotaan Boston. Sebaliknya, insinyur robotika lunak dapat menggunakan model 3-D di SoftZoo untuk mensimulasikan desain yang berbeda dan mengevaluasi seberapa efektif algoritma yang mengendalikan robot mereka dalam navigasi. Pada gilirannya, hal ini akan menghemat waktu dan sumber daya peneliti.
Namun, keterbatasan teknik fabrikasi saat ini menghalangi terwujudnya desain robot lunak ini. “Transfer dari simulasi ke robot fisik masih belum terpecahkan dan memerlukan studi lebih lanjut,” kata Wang. “Model otot, kekakuan yang bervariasi secara spasial, dan sensorisasi di SoftZoo tidak dapat direalisasikan secara langsung dengan teknik fabrikasi saat ini, jadi kami sedang mengatasi tantangan ini.” Di masa depan, perancang platform sedang mengincar aplikasi dalam mekanika manusia, seperti manipulasi, mengingat kemampuannya untuk menguji kontrol robot. Untuk mendemonstrasikan potensi ini, tim Wang merancang lengan 3-D yang melemparkan bola salju ke depan.
- Konten Bertenaga SEO & Distribusi PR. Dapatkan Amplifikasi Hari Ini.
- PlatoAiStream. Kecerdasan Data Web3. Pengetahuan Diperkuat. Akses Di Sini.
- Mencetak Masa Depan bersama Adryenn Ashley. Akses Di Sini.
- Sumber: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :memiliki
- :adalah
- :bukan
- :Di mana
- $NAIK
- 10
- 11
- 12
- 8
- 9
- a
- kemampuan
- mempercepat
- Mencapai
- di seluruh
- Menambahkan
- diadopsi
- Bergabung
- tangkas
- AI
- alex
- algoritma
- Membiarkan
- memungkinkan
- sudah
- an
- dan
- Andrew
- hewan
- Lain
- Apa pun
- aplikasi
- pendekatan
- ADALAH
- ARM
- senjata
- buatan
- kecerdasan buatan
- AS
- aspek
- Menilai
- Asisten
- At
- penulis
- secara otomatis
- Bayi
- berdasarkan
- BE
- Bears
- karena
- menjadi
- sebelum
- TERBAIK
- biologi
- tubuh
- boston
- kedua
- Otak
- otak
- Cabang
- Membawa
- membangun
- Bangunan
- by
- CAN
- tidak bisa
- kemampuan
- mampu
- pusat
- tantangan
- menantang
- perubahan
- Penulis Bersama
- datang
- pembandingan
- lengkap
- menyelesaikan
- compliant
- luas
- komputer
- Komputer Ilmu
- melakukan
- konfigurasi
- kontrol
- mengendalikan
- bisa
- membuat
- CSAIL
- terbaru
- disesuaikan
- Tanggal
- mendemonstrasikan
- menunjukkan
- menunjukkan
- Departemen
- Tergantung
- GURUN
- Mendesain
- dirancang
- desainer
- desain
- ditentukan
- mengembangkan
- dikembangkan
- berkembang
- berbeda
- Kepala
- beberapa
- do
- Oleh
- Capung
- Capung
- selama
- mudah
- Efektif
- efisien
- elektro
- memungkinkan
- Mesin
- Teknik
- Insinyur
- sepenuhnya
- Lingkungan Hidup
- lingkungan
- esensi
- mengevaluasi
- Bahkan
- contoh
- mahal
- eksplorasi
- Fitur
- bidang
- Menemukan
- fleksibel
- banjir
- penerbangan
- berikut
- Untuk
- bentuk
- Depan
- Kerangka
- dari
- lebih lanjut
- masa depan
- menghasilkan
- geometri
- diberikan
- memahami
- Memiliki
- membantu
- membantu
- membantu
- Seterpercayaapakah Olymp Trade? Kesimpulan
- HTTPS
- manusia
- ES
- if
- menggambarkan
- gambar
- pentingnya
- meningkatkan
- in
- Termasuk
- Pada meningkat
- Inspirasi
- mengilhami
- menginspirasi
- sebagai gantinya
- Intelijen
- berinteraksi
- interaksi
- IT
- NYA
- jpg
- laboratorium
- laboratorium
- besar
- memimpin
- Hidup
- 'like'
- keterbatasan
- melihat
- terlihat seperti
- Mesin
- manipulasi
- banyak
- Massa
- massachusetts
- Mungkin..
- cara
- mekanika
- metode
- Tengah
- hilang
- misi
- MIT
- model
- lebih
- gerakan
- pindah
- gerakan
- banyak
- Arahkan
- Navigasi
- New
- jumlah
- objek
- of
- sering
- on
- ONE
- open source
- pembukaan
- membuka
- optimal
- dioptimalkan
- Mengoptimalkan
- mengoptimalkan
- or
- Lainnya
- Lainnya
- kami
- menguraikan
- path
- melakukan
- prestasi
- orang
- fisik
- Platform
- Platform
- plato
- Kecerdasan Data Plato
- Data Plato
- kemungkinan
- potensi
- berpotensi
- sebelumnya
- masalah
- Profesor
- proyek
- menyediakan
- menempatkan
- cepat
- bereaksi
- dunia nyata
- menyadari
- mengurangi
- daerah
- rehabilitasi
- sisa
- wajib
- membutuhkan
- menyelamatkan
- penelitian
- peneliti
- peneliti
- Sumber
- mengakibatkan
- robot
- robotika
- robot
- sama
- Save
- mengatakan
- adegan
- Ilmu
- ilmuwan
- mencari
- beberapa
- Bentuknya
- bentuk
- Hiu
- sisi
- mirip
- simulasi
- serentak
- sejak
- ukuran
- salju
- So
- Lunak
- MEMECAHKAN
- beberapa
- Segera
- mutakhir
- sumber
- Space
- khusus
- khusus
- tertentu
- ditentukan
- tumpukan
- berdiri
- Langkah
- Masih
- strategi
- mahasiswa
- studi
- Belajar
- seperti itu
- sistem
- pengambilan
- target
- tugas
- tugas
- tim
- teknik
- terestrial
- uji
- pengujian
- dari
- bahwa
- Grafik
- Masa depan
- mereka
- Mereka
- kemudian
- Ini
- mereka
- hal
- ini
- meskipun?
- Melalui
- Pelemparan
- waktu
- untuk
- perjalanan
- MENGHIDUPKAN
- Putar
- mengetik
- memahami
- universitas
- tak terbatas
- perkotaan
- us
- menggunakan
- Pengguna
- menggunakan
- berbagai
- sangat
- adalah
- air
- Waters
- Watson
- Cara..
- we
- adalah
- Apa
- ketika
- apakah
- yang
- sementara
- SIAPA
- Liar
- Margasatwa
- akan
- dengan
- Kerja
- kerja
- akan
- zephyrnet.dll
Lebih dari Nanowerk

Para ilmuwan menemukan metode baru untuk menghasilkan nanopartikel logam untuk digunakan sebagai katalis
Node Sumber: 3039388
Stempel Waktu: Desember 28, 2023

Memandu desain perangkat silikon dengan peningkatan efisiensi
Node Sumber: 2839986
Stempel Waktu: Agustus 23, 2023
Lebah dan akar robot menawarkan harapan akan lingkungan yang lebih sehat dan makanan yang cukup
Node Sumber: 1977685
Stempel Waktu: Februari 25, 2023

Bahan karbon berukuran nano dapat digunakan untuk mengobati sindrom Down
Node Sumber: 2778869
Stempel Waktu: Juli 21, 2023
Sinapsis neuromorfik yang dibuat dari bahan inti untuk TV OLED
Node Sumber: 2541090
Stempel Waktu: Mar 24, 2023

Mempercepat semikonduktor berkelanjutan dengan 'tinta multielemen'
Node Sumber: 2911790
Stempel Waktu: September 28, 2023
Nanokatalis bertenaga cahaya untuk membuat hidrogen menggunakan sinar matahari
Node Sumber: 3053672
Stempel Waktu: Jan 10, 2024
Para ilmuwan mengamati transisi ke perilaku kacau pada skala nanometer
Node Sumber: 1982382
Stempel Waktu: Februari 27, 2023

Robot dan AI bekerja sama untuk menemukan katalis yang sangat selektif
Node Sumber: 1940293
Stempel Waktu: Februari 3, 2023