यह लघु पोस्ट कुछ लेज़र स्टेशन एन्हांसमेंट का वर्णन करती है जो हमने अपने प्रयोगों को दूरस्थ रूप से चलाने में सक्षम बनाने के लिए किए हैं।
सेटअप समस्याएं
हमारा लेज़र फ़ॉल्ट इंजेक्शन प्लेटफ़ॉर्म एक माइक्रोस्कोप से बना है जिसका उपयोग परीक्षण के तहत एक डिवाइस पर लेज़र स्रोत को केंद्रित करने के लिए किया जाता है। यह लक्षित चिप की आंतरिक संरचना का निरीक्षण करने और लेजर बीम आकार को समायोजित करने के लिए इन्फ्रारेड कैमरे से लैस है। सौभाग्य से, यह एक मोटरयुक्त चरण से लैस है जो हमारे कस्टम सॉफ़्टवेयर एप्लिकेशन से चिप में लेजर बीम को स्थानांतरित करने की अनुमति देता है। हमारे द्वारा विकसित सभी उपकरण लिनक्स ऑपरेटिंग सिस्टम पर चलते हैं, और इसलिए SSH कनेक्शन के माध्यम से उनका उपयोग करना संभव है, बशर्ते आपके पास अच्छा इंटरनेट कनेक्शन हो। हमने माइक्रोस्कोप कैमरा लाइव छवि से निपटने में कुछ विलंबता मुद्दों का सामना किया, जिसे हमने SSH संपीड़न विकल्प को चालू करके जल्दी से हल कर लिया (-C) जो डिफ़ॉल्ट रूप से सक्षम नहीं है और आवश्यक स्ट्रीमिंग बैंडविड्थ को बहुत कम कर देता है। बहरहाल, उस समय सीटू हस्तक्षेप में अभी भी कुछ तत्वों की आवश्यकता थी:
- कैमरे के प्रकाश स्रोत को नियंत्रित करना: एक समर्पित उपकरण कैमरा विज़ुअलाइज़ेशन के लिए चिप को रोशन करने के लिए इन्फ्रारेड लाइट प्रदान करता है।
- मैकेनिकल कैमरा शटर को खोलना या बंद करना: यह शटर माइक्रोस्कोप का हिस्सा है और लेजर का उपयोग करते समय बंद होना चाहिए।
- माइक्रोस्कोप उद्देश्य को बदलना: 4 अलग-अलग ऑप्टिकल उद्देश्यों को यांत्रिक घूर्णन बुर्ज पर लगाया जाता है और विभिन्न माइक्रोस्कोप आवर्धन की अनुमति देता है।
नीचे विस्तार से बताया गया है कि शटर और प्रकाश स्रोत को दूर से नियंत्रित करने के लिए हमने अपनी परीक्षण बेंच को कैसे अनुकूलित किया। विशेष रूप से, हम उन अनुकूलनों की लागत को सीमित करना चाहते थे, और इसे जल्द से जल्द उपलब्ध कराना चाहते थे।
प्रकाश स्रोत को नियंत्रित करना
अर्धचालकों का सिलिकॉन सब्सट्रेट इन्फ्रारेड प्रकाश के लिए अर्ध-पारदर्शी है, और इन्फ्रारेड कैमरे के साथ, इसलिए सर्किट की आंतरिक संरचना का निरीक्षण करना संभव है। अवलोकन को संभव बनाने के लिए, सर्किट को इन्फ्रारेड प्रकाश स्रोत से प्रकाशित किया जाना चाहिए। हमारे लेज़र माइक्रोस्कोप को एक समर्पित प्रकाश स्रोत उपकरण के साथ भेजा गया था, a हयाशी LA-150CE, जिसमें प्रकाश की तीव्रता को समायोजित करने के लिए एक पावर स्विच और एक नॉब है, जैसा कि नीचे दर्शाया गया है। जब एक लेज़र परीक्षण अभियान शुरू किया जाता है, तो हम आमतौर पर प्रकाश स्रोत को बंद कर देते हैं क्योंकि यह घटकों के साथ हस्तक्षेप कर सकता है, खासकर जब नमूने पतले होते हैं।

उपकरण के पीछे देखने पर, हमें एक "रिमोट" स्विच मिला और एक बाहरी कनेक्टर उपलब्ध था। हम समझ गए हैं कि यह प्रकाश स्रोत कुछ पिछली सहस्राब्दी कनेक्टर के माध्यम से रिमोट कंट्रोल क्षमता प्रदान करता है। वेब पर बहुत कम दस्तावेज मिल सकते हैं, लेकिन हमने हयाशी कैटलॉग में पहचान की है कि वहां मौजूद है लैन नियंत्रण इकाई इस प्रकाश स्रोत के साथ संगत। हालांकि यह उत्पाद बंद कर दिया गया है। साथ ही, LAN कनेक्टिविटी बहुत सुविधाजनक नहीं है। उसी कैटलॉग में, हमें प्रकाश स्रोत के कनेक्टर के लिए विनिर्देश मिले। हालांकि यह बहुत विस्तृत नहीं है, यह इसे आजमाने के लिए पर्याप्त था।
हयाशी उत्पादों की सूची से रिमोट कंट्रोल पिनआउट: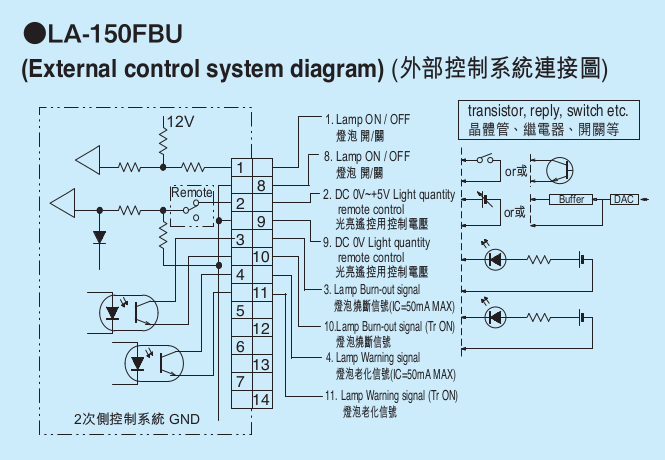
यह इंटरफ़ेस दो मुख्य रोचक विशेषताएं प्रदान करता है:
- डिजिटल पिन 1 और 8 का उपयोग दीपक को छोटा करके चालू और बंद करने के लिए किया जा सकता है या नहीं। पिन 8 वास्तव में जमीन है, इसलिए केवल पिन 1 ही वास्तव में प्रासंगिक है।
- एनालॉग पिन 2 प्रकाश की तीव्रता को 0 V (न्यूनतम तीव्रता) से 5 V (अधिकतम तीव्रता) तक के सिग्नल के साथ नियंत्रित करता है। जब रिमोट मोड सक्षम होता है, तो फ्रंट पैनल पोटेंशियोमीटर बायपास हो जाता है और प्रकाश की तीव्रता सीधे इस पिन द्वारा नियंत्रित होती है।
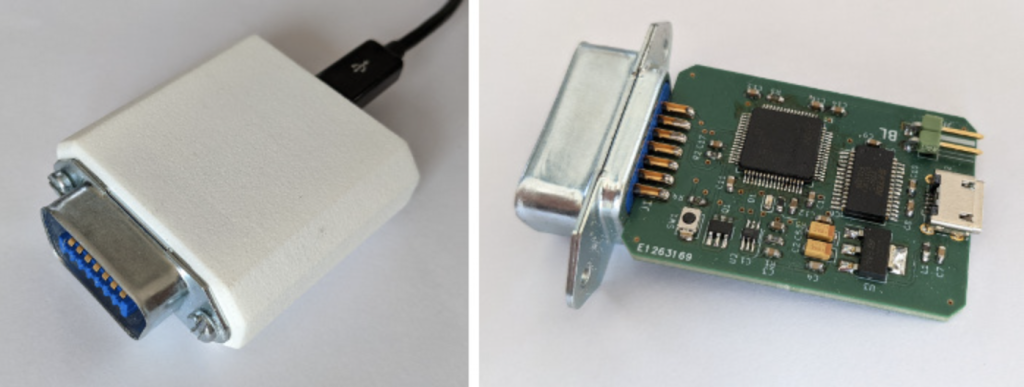
हमने अपने खुद के खरोंच से निर्माण करने का फैसला किया हयाशी लाइट रिमोट कंट्रोलर निम्नलिखित भागों का उपयोग करना:
- एम्बेडेड एप्लिकेशन कोड को होस्ट करने के लिए एक STM32 माइक्रोकंट्रोलर,
- USB से डोंगल को नियंत्रित करने की अनुमति देने के लिए एक FT232 USB-से-सीरियल कनवर्टर,
- प्रकाश की तीव्रता को नियंत्रित करने के लिए 5621 से 0V एनालॉग सिग्नल जनरेशन के लिए AD5B डिजिटल-टू-एनालॉग कन्वर्टर।
हमने पीसीबी का उपयोग करके डिजाइन किया है Kicad. ईमानदार होने के लिए, यह डिज़ाइन थोड़ा बड़ा हो सकता है: वर्तमान आवश्यकता के लिए माइक्रोकंट्रोलर बहुत बड़ा है, और FT232 को हटाया जा सकता है क्योंकि STM32 उपकरणों में पहले से ही USB क्षमताएं हैं, सॉफ़्टवेयर विकास समय की कीमत पर। हमारा लक्ष्य इसे जल्दी और गंदा बनाना था और हमारे पहले से डिज़ाइन किए गए कुछ आरेखों का पुन: उपयोग करना था।
मज़े के लिए, और क्योंकि हम मानते हैं कि यह एक बहुत ही आशाजनक भाषा है, हमने रस्ट में माइक्रोकंट्रोलर फ़र्मवेयर विकसित किया है।
हमने अंत में उपयोग करके एक साधारण प्लास्टिक बाड़े को डिजाइन किया FreeCAD, और इसके साथ प्रिंट किया sculpteo.
अप्रत्याशित रूप से, इस परियोजना का सबसे कठिन हिस्सा कनेक्टर की पहचान करना था (पुरुष पक्ष के लिए एम्फेनोल से संदर्भ 5710140), और इसे खरीदना भी था क्योंकि यह अप्रचलित है और अब कई आपूर्तिकर्ताओं द्वारा बेचा नहीं जाता है। पार्ट सप्लायर सर्च इंजन ऑक्टोपार्ट मदद कर सकते है।
सभी योजनाबद्ध और डिज़ाइन फ़ाइलें हमारे पर उपलब्ध हैं गिटहब भंडार.
कैमरा शटर नियंत्रित करना
माइक्रोस्कोप में, लेजर बीम और कैमरा एक ही ऑप्टिकल पथ साझा करते हैं। जब लेज़र शूटिंग कर रहा होता है, तो प्रकाश का एक अंश सिलिकॉन द्वारा परावर्तित होता है और कैमरे से टकराएगा। सेंसर क्षति को रोकने के लिए जिसके परिणामस्वरूप लंबे समय तक मृत पिक्सेल हो सकते हैं, कैमरे के सामने एक ऑप्टिकल मैकेनिकल शटर को बंद किया जा सकता है। शटर मैनुअल है और इसे क्रियान्वित करने के लिए बहुत कम या बिना किसी बल की आवश्यकता होती है।
रिमोट कंट्रोल को संभव बनाने के लिए, हमने एक छोटी स्टेपर मोटर खरीदी और ए Polulu से TIC T834 स्टेपर मोटर कंट्रोलर. मोटर के साथ शटर को स्थानांतरित करने के लिए, हमने माइक्रोस्कोप पर घुड़सवार होने के लिए 3डी गियर और एक शरीर को विकसित और मुद्रित किया।
TIC T834 को मोटर को ऊर्जा प्रदान करने के लिए एक शक्ति स्रोत की आवश्यकता होती है, लेकिन जैसा कि हमारी मोटर बहुत अधिक करंट नहीं खींचती है, हमने मोटर को भी बिजली देने के लिए T834 की USB बिजली आपूर्ति को छोटा कर दिया। TIC नियंत्रकों को सेटअप करना और उपयोग करना बहुत आसान है, यह अच्छी तरह से प्रलेखित है और हमें अपने सॉफ़्टवेयर टूल से मोटर को नियंत्रित करने में बहुत कम समय लगा। हमने पायथन में एक छोटा नियंत्रक वर्ग विकसित किया है जो अब हमारे में एकीकृत है pystages पुस्तकालय।
स्टेपर मोटर नियंत्रकों को चालू होने पर वर्तमान मोटर स्थिति का पता लगाने की आवश्यकता होती है। यह एक इनिशियलाइज़ेशन प्रक्रिया के साथ किया जाता है जहाँ मोटर तब तक घूमती रहेगी जब तक कोई संपर्क स्विच नियंत्रक को नहीं बताता कि मोटर शून्य स्थिति पर है। हमने T834 से सीधे जुड़े एक साधारण स्विच का उपयोग किया जिसमें यह सुविधा अंतर्निहित है।
हमने जो 3डी बॉडी पार्ट प्रिंट किया था, वह बहुत सटीक नहीं था और पहली बार में दोनों गियर ठीक से काम नहीं कर रहे थे। गियर के बीच की खाई को ठीक करने के लिए गर्मी का उपयोग करके हम प्लास्टिक के हिस्से को थोड़ा मोड़ सकते हैं। कुछ समायोजन के बाद, हम दूरस्थ रूप से कैमरा शटर को पूरी तरह से खोलने और बंद करने में सक्षम थे!
यांत्रिक डिजाइन हमारे पर उपलब्ध है गिटहब भंडार.
अंतिम विचार
प्रकाश स्रोत और कैमरा शटर के नियंत्रण को एकीकृत करने से हमें कई लेजर परीक्षण अभियान दूरस्थ रूप से चलाने की अनुमति मिली। यह पहले की तुलना में अधिक सुविधाजनक भी है, क्योंकि शटर को बंद करना और प्रकाश को बंद करना अब लेजर चालू होने पर स्वचालित रूप से किया जा सकता है, जबकि इसके लिए पहले मानव शारीरिक हस्तक्षेप की आवश्यकता होती थी और इसे आसानी से भुलाया जा सकता था।
उद्देश्यों के बुर्ज के नियंत्रण के संबंध में, मोटर चालित बुर्ज पहले से मौजूद हैं, लेकिन दुर्भाग्य से वे काफी महंगे हैं, और इसे बदलना मुश्किल हो सकता है। फिलहाल, हमें कोई सरल और कम लागत वाला समाधान नहीं मिला। एक बाहरी मोटर के साथ बुर्ज को घुमाना कठिन है, विशेष रूप से क्योंकि वहाँ एक स्प्रिंग है जो बुर्ज को लॉक कर देता है जब उद्देश्य माइक्रोस्कोप से जुड़ा होता है। इसके अलावा, हम मोटराइज्ड स्टेज में जो वजन जोड़ सकते हैं वह सीमित है। इस समय यह अभी भी एक खुला मुद्दा है, लेकिन यह दूर से काम करने से नहीं रोकता है, हम केवल एक चयनित आवर्धन तक सीमित हैं।
अंत में, जब नमूना टूट जाता है तब भी उसे बदलने के लिए प्रयोगशाला तक पहुंच की आवश्यकता होती है। सौभाग्य से, यह बहुत बार नहीं होता है। हम अंततः एक ही बेटीबोर्ड पर कई सर्किटों को मल्टीप्लेक्स कर सकते हैं, इसलिए हम भौतिक प्रतिस्थापन की आवश्यकता से पहले कुछ उपकरणों को जला सकते हैं, फिर भी हमने ऐसा कोई समाधान विकसित नहीं किया है।

- एसईओ संचालित सामग्री और पीआर वितरण। आज ही प्रवर्धित हो जाओ।
- प्लेटोआईस्ट्रीम। Web3 डेटा इंटेलिजेंस। ज्ञान प्रवर्धित। यहां पहुंचें।
- मिंटिंग द फ्यूचर डब्ल्यू एड्रिएन एशले। यहां पहुंचें।
- PREIPO® के साथ PRE-IPO कंपनियों में शेयर खरीदें और बेचें। यहां पहुंचें।
- स्रोत: https://www.ledger.com/blog/laser-improvements
- :हैस
- :है
- :नहीं
- :कहाँ
- 1
- 14
- 24
- 3d
- 8
- a
- योग्य
- पहुँच
- सही
- के पार
- वास्तव में
- रूपांतरों
- जोड़ना
- समायोजन
- बाद
- गठबंधन
- सब
- अनुमति देना
- की अनुमति देता है
- पहले ही
- भी
- an
- और
- कोई
- अब
- आवेदन
- स्थापत्य
- हैं
- AS
- At
- स्वतः
- उपलब्ध
- बैंडविड्थ
- BE
- किरण
- क्योंकि
- से पहले
- मानना
- नीचे
- के बीच
- बड़ा
- बिट
- परिवर्तन
- खरीदा
- टूटा
- निर्माण
- में निर्मित
- जलाना
- लेकिन
- by
- कैमरा
- अभियान
- अभियान
- कर सकते हैं
- क्षमताओं
- सूची
- टुकड़ा
- कक्षा
- समापन
- बंद
- समापन
- कोड
- संगत
- घटकों
- जुड़ा हुआ
- संबंध
- कनेक्टिविटी
- संपर्क करें
- नियंत्रण
- नियंत्रित
- नियंत्रक
- नियंत्रित
- नियंत्रण
- सुविधाजनक
- सही
- लागत
- सका
- वर्तमान
- रिवाज
- अनुकूलित
- मृत
- व्यवहार
- का फैसला किया
- समर्पित
- चूक
- डिज़ाइन
- बनाया गया
- विस्तृत
- विकसित करना
- विकसित
- विकास
- युक्ति
- डिवाइस
- डीआईडी
- विभिन्न
- मुश्किल
- सीधे
- दस्तावेज़ीकरण
- कर देता है
- किया
- नीचे
- खींचना
- दौरान
- आसानी
- आसान
- तत्व
- एम्बेडेड
- सक्षम
- ऊर्जा
- संवर्द्धन
- पर्याप्त
- उपकरण
- सुसज्जित
- विशेष रूप से
- अंत में
- मौजूद
- मौजूद
- महंगा
- प्रयोगों
- बाहरी
- का सामना करना पड़ा
- दोष
- Feature
- विशेषताएं
- कुछ
- फ़ाइलें
- अंत में
- खोज
- प्रथम
- पहली बार
- फोकस
- निम्नलिखित
- के लिए
- सेना
- भूल
- भाग्यवश
- पाया
- अंश
- से
- सामने
- मज़ा
- अन्तर
- पीढ़ी
- लक्ष्य
- अच्छा
- बहुत
- जमीन
- होना
- कठिन
- है
- मदद
- मारो
- मेजबान
- कैसे
- तथापि
- HTTPS
- मानव
- पहचान
- पहचान
- की छवि
- in
- एकीकृत
- दिलचस्प
- इंटरफेस
- हस्तक्षेप करना
- आंतरिक
- इंटरनेट
- इंटरनेट कनेक्शन
- हस्तक्षेप
- मुद्दा
- मुद्दों
- IT
- केवल
- प्रयोगशाला
- भाषा
- लेज़र
- विलंब
- विलंबता मुद्दे
- खाता
- पुस्तकालय
- प्रकाश
- सीमा
- सीमित
- लिनक्स
- थोड़ा
- जीना
- ताले
- लंबा
- लॉट
- कम लागत
- बनाया गया
- मुख्य
- बनाना
- निर्माण
- गाइड
- बहुत
- अधिकतम-चौड़ाई
- अधिकतम
- मई..
- यांत्रिक
- माइक्रोस्कोप
- मिलेनियम
- न्यूनतम
- मोड
- पल
- अधिक
- अधिकांश
- मोटर
- चाल
- चलती
- चाहिए
- आवश्यकता
- ज़रूरत
- नहीं
- अभी
- उद्देश्य
- उद्देश्य
- निरीक्षण
- अप्रचलित
- of
- बंद
- ऑफर
- अक्सर
- on
- केवल
- खुला
- परिचालन
- ऑपरेटिंग सिस्टम
- विकल्प
- or
- आदेश
- हमारी
- आउट
- महामारी
- पैनल
- भाग
- विशेष
- भागों
- अतीत
- पथ
- भौतिक
- देवदार
- जगह
- प्लास्टिक
- मंच
- प्लेटो
- प्लेटो डेटा इंटेलिजेंस
- प्लेटोडाटा
- स्थिति
- संभव
- पद
- बिजली
- बिजली की आपूर्ति
- संचालित
- को रोकने के
- एस्ट्रो मॉल
- उत्पाद
- परियोजना
- होनहार
- प्रदान करना
- बशर्ते
- प्रदान करता है
- क्रय
- अजगर
- त्वरित
- जल्दी से
- लेकर
- वास्तव में
- कम कर देता है
- प्रतिबिंबित
- प्रासंगिक
- दूरस्थ
- हटाया
- की जगह
- प्रतिस्थापन
- अपेक्षित
- की आवश्यकता होती है
- परिणाम
- पुनः प्रयोग
- रन
- जंग
- वही
- Search
- चयनित
- अर्धचालक
- व्यवस्था
- आकार
- Share
- भेज दिया
- शूटिंग
- कम
- Shorted
- शॉर्ट करना
- पक्ष
- संकेत
- सिलिकॉन
- सरल
- के बाद से
- एक
- छोटा
- So
- सॉफ्टवेयर
- सॉफ्टवेयर विकास
- बेचा
- समाधान
- कुछ
- जल्दी
- स्रोत
- विनिर्देश
- स्पिन
- वसंत
- ट्रेनिंग
- शुरू
- स्टेशन
- फिर भी
- एसटीएम०१६
- स्ट्रीमिंग
- संरचना
- ऐसा
- आपूर्तिकर्ताओं
- आपूर्ति
- स्विच
- प्रणाली
- लक्षित
- बताता है
- परीक्षण
- परीक्षण
- से
- कि
- RSI
- उन
- वहाँ।
- इसलिये
- वे
- इसका
- उन
- हालांकि?
- यहाँ
- पहर
- सेवा मेरे
- भी
- ले गया
- उपकरण
- कोशिश
- बदल गया
- मोड़
- दो
- के अंतर्गत
- समझ लिया
- दुर्भाग्य से
- जब तक
- us
- USB के
- उपयोग
- प्रयुक्त
- का उपयोग
- आमतौर पर
- बहुत
- दृश्य
- जरूरत है
- था
- we
- वेब
- भार
- कुंआ
- थे
- कब
- कौन कौन से
- मर्जी
- साथ में
- काम कर रहे
- दूर से काम करना
- अभी तक
- इसलिए आप
- जेफिरनेट
- शून्य