मेटा क्वेस्ट हेडसेट को चलती गाड़ियों में काम करने लायक बनाने पर काम कर रहा है।
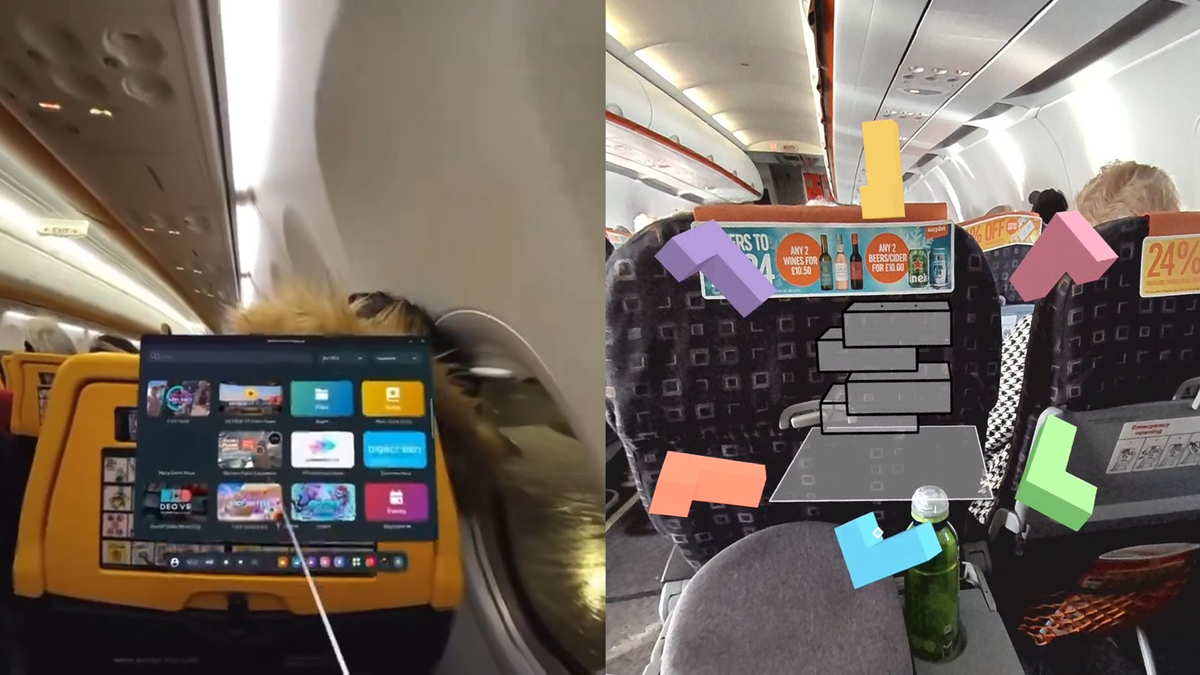
यूएक्स डिजाइनर एंड्रयू फॉक्स ने एक वीडियो दोबारा पोस्ट किया एक्स के लिए फेसबुक उपयोगकर्ता Netsvietaiev ऑलेक्ज़ेंडर का की कोशिश कर रहा एक हवाई जहाज पर पासथ्रू मोड में क्वेस्ट 3 का उपयोग करना, लेकिन इंटरफ़ेस दूर चला जाने के कारण असमर्थ होना।
मेटा के सीटीओ एंड्रयू बोसवर्थ उत्तर दिया पोस्ट में संक्षेप में बताएं कि ऐसा क्यों हो रहा था, और यह कहकर समाप्त किया कि मेटा "इस पर काम कर रहा है"।
नहीं, हम आपके हेडसेट की गति के सापेक्ष वस्तुओं को स्थानीयकृत रखने के लिए IMU का उपयोग करते हैं, इसलिए चलते हुए वाहन एक चुनौती का प्रतिनिधित्व करते हैं (जब वे किसी भी दिशा में गति करते हैं)। हम कैमरों का भी उपयोग करते हैं, बेशक, वे एक साथ काम करते हैं क्योंकि आईएमयू उच्च आवृत्ति लेकिन कम सटीकता वाला है। इस पर काम करते हुए!
- बोज़ (@boztank) जनवरी ७,२०२१
तो चलती गाड़ियों में यह बहाव वास्तव में क्यों होता है?
लोग अक्सर सोचते हैं कि हेडसेट, ग्लास और सेल्फ-ट्रैकिंग कंट्रोलर पर मार्कर रहित इनसाइड-आउट ट्रैकिंग सिस्टम केवल कैमरों का उपयोग करते हैं, लेकिन ऐसा नहीं है। ये सिस्टम जड़त्वीय माप इकाई (आईएमयू) पर भी उतना ही निर्भर करते हैं, एक चिप जिसमें एक छोटा एक्सेलेरोमीटर और जाइरोस्कोप होता है।
जबकि कैमरे आमतौर पर 30 हर्ट्ज या 60 हर्ट्ज पर चलते हैं, आईएमयू आमतौर पर 1000 हर्ट्ज के आसपास अपडेट प्रदान करता है, जिससे बहुत कम विलंबता सक्षम होती है। हालाँकि, IMU वास्तव में पूर्ण गति का पता नहीं लगा सकता - कम से कम सीधे तौर पर नहीं। हालांकि आईएमयू में एक्सेलेरोमीटर गुरुत्वाकर्षण के सापेक्ष त्वरण को महसूस करता है, और आप वेग प्राप्त करने के लिए समय के साथ त्वरण का अभिन्न अंग ले सकते हैं। और यदि आप समय के साथ उन वेग मानों का अभिन्न अंग लेते हैं, तो आपको मूल स्थिति से विस्थापन मिलता है।
इस प्रक्रिया को डेड रेकनिंग कहा जाता है। पल-पल, इसी तरह हर हेडसेट और कंट्रोलर खुद को ट्रैक करता है, और कैमरे या लेजर बेस स्टेशन जैसे ऑप्टिकल घटक का उपयोग केवल आईएमयू डेटा के शोर के कारण होने वाली संचयी त्रुटि को ठीक करने के लिए किया जाता है। लेकिन हवाई जहाज जैसे किसी गतिशील वाहन में, एक्सेलेरोमीटर स्वयं वाहन के त्वरण को पकड़ लेगा, यह सोचते हुए कि यह हेडसेट त्वरण है, जिसके परिणामस्वरूप अचानक और तेजी से स्थितिगत बहाव होता है जिसे आप ऊपर फॉक्स के वीडियो में देख सकते हैं।
ऐप्पल विज़न प्रो में एक ट्रैवल मोड है, लेकिन यह स्पष्ट नहीं है कि यह वास्तव में क्या करता है।
यह स्पष्ट नहीं है कि बोसवर्थ का यह कहने का वास्तव में क्या मतलब है कि मेटा समस्या पर "काम" कर रहा है।
वर्तमान में क्वेस्ट पर 6DoF स्थितीय ट्रैकिंग को अक्षम करना संभव है, और हेडसेट वापस 3DoF रोटेशन-ओनली ट्रैकिंग पर आ जाएगा, लेकिन यह पासथ्रू को भी अक्षम कर देता है। तो मेटा शायद स्थितिगत ट्रैकिंग अक्षम होने पर पासथ्रू की अनुमति देने की योजना बना रहा होगा।
वैकल्पिक रूप से, मेटा शायद सिस्टम को पूरी तरह से कैमरे के दृश्यों पर भरोसा करने और आईएमयू को अनदेखा करने का निर्देश देकर, चलती वाहनों में स्थितीय ट्रैकिंग कार्य करने के लिए काम कर रहा है। पिछले साल मेटा एक शोध परियोजना का प्रदर्शन किया क्वेस्ट प्रो को चलती हुई बीएमडब्ल्यू में चलाना, लेकिन इसमें कार के अपने ऑनबोर्ड आईएमयू के साथ इंटरफेसिंग शामिल थी।
इस बीच, ऐप्पल विज़न प्रो में हवाई जहाज़ पर उपयोग के लिए ट्रैवल मोड है, और ऐप्पल ने इस उपयोग के मामले का विपणन किया है, लेकिन वर्तमान में यह अज्ञात है कि ऐप्पल का ट्रैवल मोड वास्तव में क्या करता है। Apple ने केवल यह कहा है कि वह "दृश्यों को स्थिर करेगा"। मैं न्यूयॉर्क में विज़न प्रो लेने के बाद अपनी घर यात्रा पर इस सुविधा का परीक्षण करने की योजना बना रहा हूं।
- एसईओ संचालित सामग्री और पीआर वितरण। आज ही प्रवर्धित हो जाओ।
- प्लेटोडेटा.नेटवर्क वर्टिकल जेनरेटिव एआई। स्वयं को शक्तिवान बनाएं। यहां पहुंचें।
- प्लेटोआईस्ट्रीम। Web3 इंटेलिजेंस। ज्ञान प्रवर्धित। यहां पहुंचें।
- प्लेटोईएसजी. कार्बन, क्लीनटेक, ऊर्जा, पर्यावरण, सौर, कचरा प्रबंधन। यहां पहुंचें।
- प्लेटोहेल्थ। बायोटेक और क्लिनिकल परीक्षण इंटेलिजेंस। यहां पहुंचें।
- स्रोत: https://www.uploadvr.com/meta-working-on-quest-3-moving-vehicle-airplane-support/
- :हैस
- :है
- :नहीं
- $यूपी
- 1
- 24
- 9
- a
- ऊपर
- पूर्ण
- में तेजी लाने के
- त्वरण
- शुद्धता
- वास्तव में
- बाद
- हवाई जहाज
- हवाई जहाज
- अनुमति देना
- भी
- an
- और
- एंड्रयू
- कोई
- Apple
- हैं
- चारों ओर
- AS
- At
- दूर
- वापस
- आधार
- BE
- क्योंकि
- जा रहा है
- बीएमडब्ल्यू
- लेकिन
- by
- बुलाया
- कैमरा
- कैमरों
- कर सकते हैं
- कार
- मामला
- के कारण होता
- चुनौती
- टुकड़ा
- COM
- अंग
- शामिल हैं
- नियंत्रक
- सही
- सका
- पाठ्यक्रम
- सीटीओ
- वर्तमान में
- तिथि
- मृत
- डिजाइनर
- पता लगाना
- दिशा
- सीधे
- विकलांग
- विस्थापन
- कर देता है
- भी
- समर्थकारी
- पूरी तरह से
- त्रुटि
- प्रत्येक
- ठीक ठीक
- फेसबुक
- गिरना
- Feature
- के लिए
- लोमड़ी
- आवृत्ति
- से
- मिल
- चश्मा
- गंभीरता
- होना
- हो रहा है
- हेडसेट
- हेडसेट
- उच्चतर
- होम
- कैसे
- तथापि
- HTTPS
- i
- if
- IMU
- in
- अभिन्न
- इंटरफेस
- शामिल
- प्रतिसाद नहीं
- IT
- खुद
- यात्रा
- जेपीजी
- केवल
- रखना
- लेज़र
- पिछली बार
- पिछले साल
- विलंब
- कम से कम
- पसंद
- कम
- बनाना
- निर्माण
- साधन
- माप
- मेटा
- हो सकता है
- मोड
- पल
- प्रस्ताव
- आंदोलन
- चलती
- बहुत
- my
- नया
- न्यूयॉर्क
- वस्तुओं
- of
- अक्सर
- on
- जहाज
- केवल
- or
- मूल
- के ऊपर
- अपना
- निकासी
- शायद
- चुनना
- चयन
- योजना
- विमानों
- की योजना बना
- प्लेटो
- प्लेटो डेटा इंटेलिजेंस
- प्लेटोडाटा
- स्थिति
- संभव
- पद
- प्रति
- मुसीबत
- प्रक्रिया
- प्रदान करता है
- खोज
- खोज 3
- खोज समर्थक
- उपवास
- सापेक्ष
- भरोसा करना
- प्रतिनिधित्व
- अनुसंधान
- परिणाम
- रन
- s
- कहा
- कहावत
- देखना
- So
- किसी न किसी तरह
- स्थिर
- स्टेशनों
- ऐसा
- अचानक
- संक्षेप में प्रस्तुत करना
- प्रणाली
- सिस्टम
- T
- लेना
- परीक्षण
- कि
- RSI
- फिर
- इन
- वे
- सोचना
- विचारधारा
- इसका
- उन
- हालांकि?
- पहर
- सेवा मेरे
- एक साथ
- ट्रैकिंग
- पटरियों
- यात्रा
- आम तौर पर
- असमर्थ
- अस्पष्ट
- इकाई
- अज्ञात
- अपडेट
- UploadVR
- उपयोग
- उदाहरण
- प्रयुक्त
- उपयोगकर्ता
- मान
- वाहन
- वाहन
- वेग
- वीडियो
- दृष्टि
- दृश्यों
- था
- we
- क्या
- कब
- कौन कौन से
- क्यों
- मर्जी
- साथ में
- काम
- एक साथ काम करो
- काम कर रहे
- वर्ष
- यॉर्क
- इसलिए आप
- आपका
- जेफिरनेट