29 mai 2023 (Actualités Nanowerk) Des chercheurs du Département des sciences mécaniques et de bio-ingénierie de l'Université d'Osaka ont inventé un nouveau type de robot marcheur qui profite de l'instabilité dynamique pour naviguer. En modifiant la flexibilité des accouplements, le robot peut tourner sans avoir recours à des systèmes de contrôle informatiques complexes. Ce travail pourrait contribuer à la création de robots de sauvetage capables de traverser des terrains accidentés.
La plupart des animaux sur Terre ont développé un système de locomotion robuste utilisant des pattes qui leur offre un haut degré de mobilité dans un large éventail d'environnements. De manière quelque peu décevante, les ingénieurs qui ont tenté de reproduire cette approche ont souvent constaté que les robots à pattes sont étonnamment fragiles. La rupture d’une seule jambe en raison de contraintes répétées peut sérieusement limiter la capacité de fonctionnement de ces robots.
De plus, contrôler un grand nombre d’articulations afin que le robot puisse traverser des environnements complexes nécessite beaucoup de puissance informatique. Des améliorations de cette conception seraient extrêmement utiles pour construire des robots autonomes ou semi-autonomes qui pourraient servir de véhicules d’exploration ou de sauvetage et pénétrer dans des zones dangereuses.
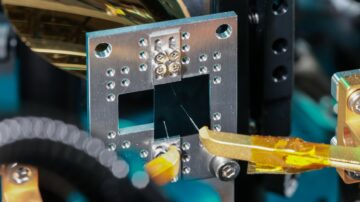
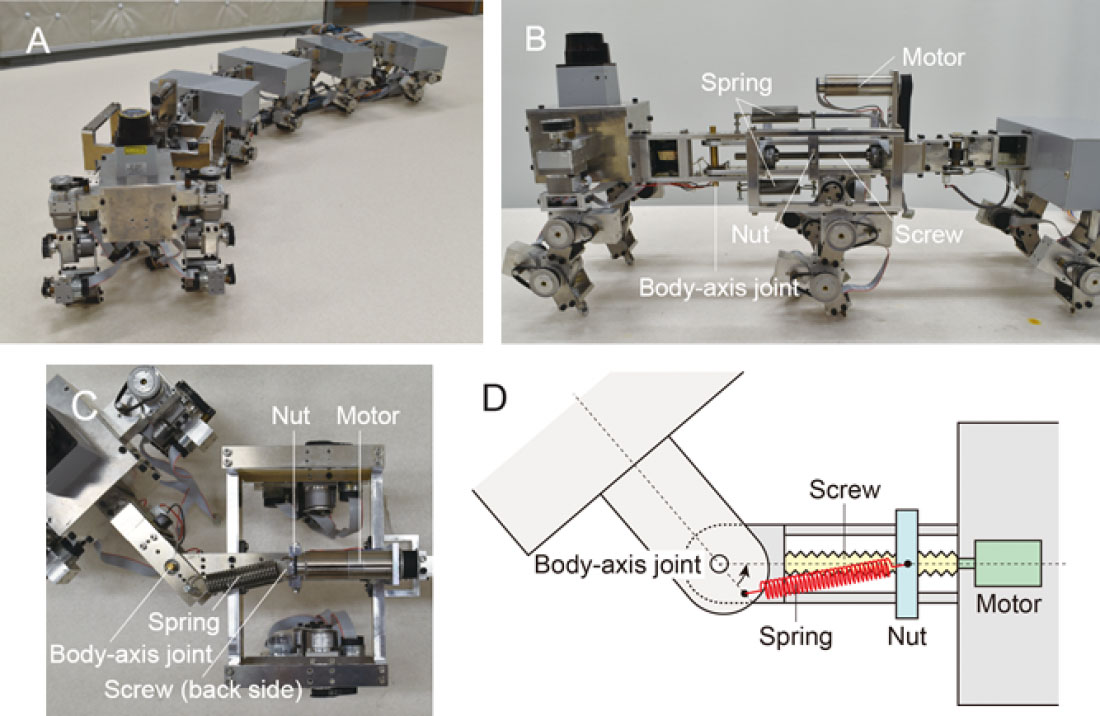 Robot myriapode (A) et mécanisme de flexibilité variable de l'axe du corps (B. Vue de face, C. Vue de dessus, D. Schémas de la vue de dessus). (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
Aujourd’hui, des chercheurs de l’Université d’Osaka ont développé un robot biomimétique « myriapode » qui tire parti d’une instabilité naturelle capable de convertir une marche droite en un mouvement courbe. Dans une étude publiée récemment dans Robotique douce (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), des chercheurs de l'Université d'Osaka décrivent leur robot composé de six segments (avec deux jambes reliées à chaque segment) et d'articulations flexibles. Grâce à une vis réglable, la flexibilité des accouplements peut être modifiée avec des moteurs pendant le mouvement de marche.
Les chercheurs ont montré que l’augmentation de la flexibilité des articulations conduisait à une situation appelée « bifurcation en fourche », dans laquelle la marche droite devient instable. Au lieu de cela, le robot passe à la marche selon un motif courbe, soit vers la droite, soit vers la gauche. Normalement, les ingénieurs essaient d’éviter de créer des instabilités. Cependant, leur utilisation contrôlée peut permettre une maniabilité efficace.
"Nous avons été inspirés par la capacité de certains insectes extrêmement agiles qui leur permettent de contrôler l'instabilité dynamique de leur propre mouvement et d'induire des changements de mouvement rapides", explique Shinya Aoi, auteur de l'étude. Étant donné que cette approche ne dirige pas directement le mouvement de l’axe du corps, mais contrôle plutôt la flexibilité, elle peut réduire considérablement à la fois la complexité informatique ainsi que les besoins énergétiques.
Robot myriapode (A) et mécanisme de flexibilité variable de l'axe du corps (B. Vue de face, C. Vue de dessus, D. Schémas de la vue de dessus). (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
Aujourd’hui, des chercheurs de l’Université d’Osaka ont développé un robot biomimétique « myriapode » qui tire parti d’une instabilité naturelle capable de convertir une marche droite en un mouvement courbe. Dans une étude publiée récemment dans Robotique douce (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), des chercheurs de l'Université d'Osaka décrivent leur robot composé de six segments (avec deux jambes reliées à chaque segment) et d'articulations flexibles. Grâce à une vis réglable, la flexibilité des accouplements peut être modifiée avec des moteurs pendant le mouvement de marche.
Les chercheurs ont montré que l’augmentation de la flexibilité des articulations conduisait à une situation appelée « bifurcation en fourche », dans laquelle la marche droite devient instable. Au lieu de cela, le robot passe à la marche selon un motif courbe, soit vers la droite, soit vers la gauche. Normalement, les ingénieurs essaient d’éviter de créer des instabilités. Cependant, leur utilisation contrôlée peut permettre une maniabilité efficace.
"Nous avons été inspirés par la capacité de certains insectes extrêmement agiles qui leur permettent de contrôler l'instabilité dynamique de leur propre mouvement et d'induire des changements de mouvement rapides", explique Shinya Aoi, auteur de l'étude. Étant donné que cette approche ne dirige pas directement le mouvement de l’axe du corps, mais contrôle plutôt la flexibilité, elle peut réduire considérablement à la fois la complexité informatique ainsi que les besoins énergétiques.
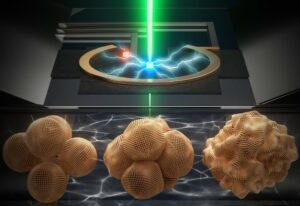
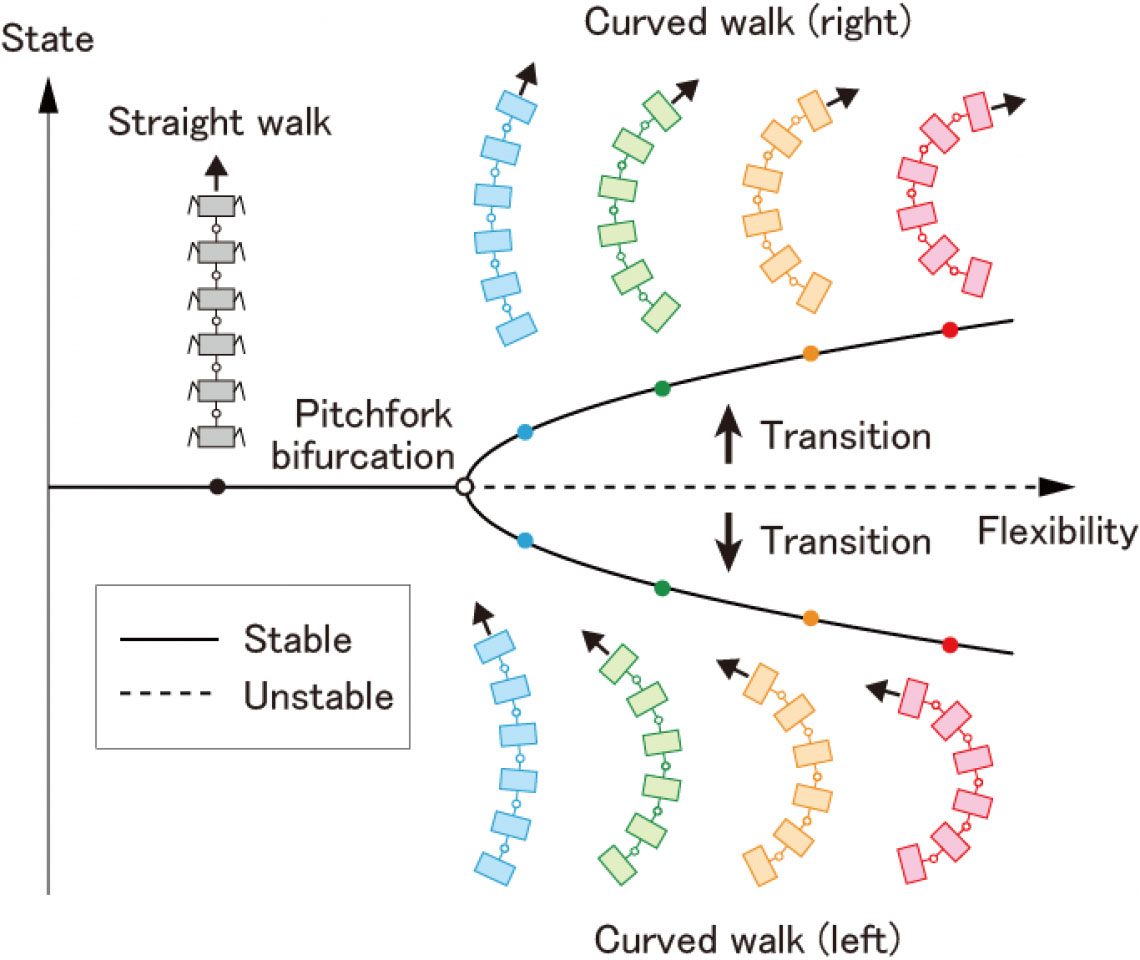 Modèles de marche stables et instables en fonction de la flexibilité de l’axe du corps. (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
L’équipe a testé la capacité du robot à atteindre des emplacements spécifiques et a découvert qu’il pouvait naviguer en empruntant des chemins courbes vers des cibles. "Nous pouvons prévoir des applications dans une grande variété de scénarios, tels que la recherche et le sauvetage, le travail dans des environnements dangereux ou l'exploration d'autres planètes", explique Mau Adachi, un autre auteur de l'étude. Les versions futures pourraient inclure des segments et des mécanismes de contrôle supplémentaires.
Modèles de marche stables et instables en fonction de la flexibilité de l’axe du corps. (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
L’équipe a testé la capacité du robot à atteindre des emplacements spécifiques et a découvert qu’il pouvait naviguer en empruntant des chemins courbes vers des cibles. "Nous pouvons prévoir des applications dans une grande variété de scénarios, tels que la recherche et le sauvetage, le travail dans des environnements dangereux ou l'exploration d'autres planètes", explique Mau Adachi, un autre auteur de l'étude. Les versions futures pourraient inclure des segments et des mécanismes de contrôle supplémentaires.
Robot myriapode (A) et mécanisme de flexibilité variable de l'axe du corps (B. Vue de face, C. Vue de dessus, D. Schémas de la vue de dessus). (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
Aujourd’hui, des chercheurs de l’Université d’Osaka ont développé un robot biomimétique « myriapode » qui tire parti d’une instabilité naturelle capable de convertir une marche droite en un mouvement courbe. Dans une étude publiée récemment dans Robotique douce (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), des chercheurs de l'Université d'Osaka décrivent leur robot composé de six segments (avec deux jambes reliées à chaque segment) et d'articulations flexibles. Grâce à une vis réglable, la flexibilité des accouplements peut être modifiée avec des moteurs pendant le mouvement de marche.
Les chercheurs ont montré que l’augmentation de la flexibilité des articulations conduisait à une situation appelée « bifurcation en fourche », dans laquelle la marche droite devient instable. Au lieu de cela, le robot passe à la marche selon un motif courbe, soit vers la droite, soit vers la gauche. Normalement, les ingénieurs essaient d’éviter de créer des instabilités. Cependant, leur utilisation contrôlée peut permettre une maniabilité efficace.
"Nous avons été inspirés par la capacité de certains insectes extrêmement agiles qui leur permettent de contrôler l'instabilité dynamique de leur propre mouvement et d'induire des changements de mouvement rapides", explique Shinya Aoi, auteur de l'étude. Étant donné que cette approche ne dirige pas directement le mouvement de l’axe du corps, mais contrôle plutôt la flexibilité, elle peut réduire considérablement à la fois la complexité informatique ainsi que les besoins énergétiques.
Modèles de marche stables et instables en fonction de la flexibilité de l’axe du corps. (Image : CC BY-NC, 2023, Aoi et al., Soft Robotics)
L’équipe a testé la capacité du robot à atteindre des emplacements spécifiques et a découvert qu’il pouvait naviguer en empruntant des chemins courbes vers des cibles. "Nous pouvons prévoir des applications dans une grande variété de scénarios, tels que la recherche et le sauvetage, le travail dans des environnements dangereux ou l'exploration d'autres planètes", explique Mau Adachi, un autre auteur de l'étude. Les versions futures pourraient inclure des segments et des mécanismes de contrôle supplémentaires.
- Contenu propulsé par le référencement et distribution de relations publiques. Soyez amplifié aujourd'hui.
- PlatoAiStream. Intelligence des données Web3. Connaissance Amplifiée. Accéder ici.
- Frapper l'avenir avec Adryenn Ashley. Accéder ici.
- Achetez et vendez des actions de sociétés PRE-IPO avec PREIPO®. Accéder ici.
- La source: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ne pas
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- capacité
- Capable
- Agis
- ajout
- Supplémentaire
- réglable et
- Avantage
- agile
- AL
- permet
- an
- ainsi que
- animaux
- Une autre
- applications
- une approche
- SONT
- domaines
- AS
- aider
- At
- tentative
- auteur
- autonome
- éviter
- Axis
- BE
- car
- devient
- corps
- tous les deux
- Breakdown
- Développement
- mais
- by
- appelé
- CAN
- Canaux centraux
- certaines
- Modifications
- en changeant
- complexe
- complexité
- ordinateur
- puissance de l'ordinateur
- connecté
- des bactéries
- contrôlée
- contrôle
- contrôles
- convertir
- pourriez
- La création
- création
- dangereux
- Date
- Degré
- Département
- Selon
- décrire
- Conception
- développé
- directement
- deux
- pendant
- Dynamic
- E & T
- chacun
- Terre
- efficace
- non plus
- permettre
- énergie
- Les ingénieurs
- Entrer
- environnements
- Pourtant, la
- évolué
- exploration
- extrêmement
- Flexibilité
- flexible
- Pour
- trouvé
- de
- avant
- fonction
- avenir
- Go
- considérablement
- Vous avez
- Haute
- Cependant
- HTTPS
- image
- améliorations
- in
- comprendre
- croissant
- inspiré
- instabilité
- plutôt ;
- développement
- A inventé
- Les enquêteurs ont
- IT
- jpg
- Genre
- gros
- LED
- à gauche
- jambes
- LIMIT
- emplacements
- Lot
- LES PLANTES
- Fabrication
- Mai..
- mécanique
- mécanisme
- mécanismes
- Milieu
- mobilité
- modifié
- (en fait, presque toutes)
- mouvement
- Moteurs
- mouvement
- Nature
- NAVIGUER
- Besoin
- Nouveauté
- normalement
- maintenant
- nombre
- of
- souvent
- on
- ONE
- or
- Autre
- plus de
- propre
- Patron de Couture
- motifs
- Planètes
- Platon
- Intelligence des données Platon
- PlatonDonnées
- power
- fournit
- publié
- Rapide
- gamme
- plutôt
- nous joindre
- récemment
- réduire
- répété
- Exigences
- a besoin
- sauver
- chercheurs
- bon
- systèmes de robot
- robotique
- Collaboratif
- robuste
- dit
- scénarios
- Sciences
- Rechercher
- clignotant
- segments
- gravement
- montré
- situation
- SIX
- So
- Doux / Pastel
- quelque peu
- groupe de neurones
- stable
- droit
- stress
- Étude
- tel
- combustion propre
- Système
- prend
- prise
- objectifs
- équipe
- qui
- Les
- leur
- Les
- Ces
- this
- à
- top
- vers
- transitions
- Essai
- TOUR
- deux
- université
- utilisé
- en utilisant
- variété
- Véhicules
- via
- Voir
- marche
- WELL
- ont été
- qui
- WHO
- large
- Large gamme
- comprenant
- sans
- Activités principales
- de travail
- pourra
- zéphyrnet
Plus de Nanowerk


Intégration basée sur l'origami de robots qui détectent, décident et réagissent
Nœud source: 2565107
Horodatage: 4 avril 2023
Hétérostructures bi/quasi bidimensionnelles à base de pérovskite : construction, propriétés et applications
Nœud source: 1938788
Horodatage: 3 février 2023

Processus de fractionnement de l'eau à haut rendement révélé
Nœud source: 1949683
Horodatage: 10 février 2023
Des chercheurs détaillent des propriétés inédites dans une famille de métaux Kagome supraconducteurs
Nœud source: 1952937
Horodatage: 11 février 2023
Les circuits photoniques intégrés pourraient aider à combler le « fossé térahertz »
Nœud source: 1899339
Horodatage: Le 14 janvier 2023

Les émissions de carbone des engrais pourraient être réduites jusqu'à 80 % d'ici 2050
Nœud source: 1951214
Horodatage: 11 février 2023
De nouveaux ferroélectriques pour une microélectronique plus efficace
Nœud source: 2716345
Horodatage: Le 9 juin 2023
Comment un nanocatalyseur de cuivre record convertit le CO2 en carburants liquides
Nœud source: 1961058
Horodatage: 16 février 2023
Des chercheurs impriment en 3D du tissu cérébral humain fonctionnel
Nœud source: 3093799
Horodatage: 2 février 2024
Développer des technologies pour réduire le coût de la production d'hydrogène vert
Nœud source: 2700260
Horodatage: Le 2 juin 2023
Percer les secrets du spin avec des sondes à hautes harmoniques
Nœud source: 2969974
Horodatage: Le 10 novembre 2023