03 mai 2023 (Actualités Nanowerk) Depuis l'adoption du terme « robotique douce » en 2008, les ingénieurs du domaine ont construit diverses représentations de machines flexibles utiles dans l'exploration, la locomotion, la réhabilitation et même l'espace. Une source d'inspiration : la façon dont les animaux se déplacent dans la nature. Une équipe de chercheurs du MIT est allée plus loin en développant DouxZoo, une plateforme bio-inspirée qui permet aux ingénieurs d'étudier la co-conception de robots mous. Le cadre optimise les algorithmes qui consistent en la conception, qui détermine à quoi ressemblera le robot ; et le contrôle, ou le système qui permet le mouvement robotique, améliorant la façon dont les utilisateurs génèrent automatiquement des contours pour des machines potentielles.
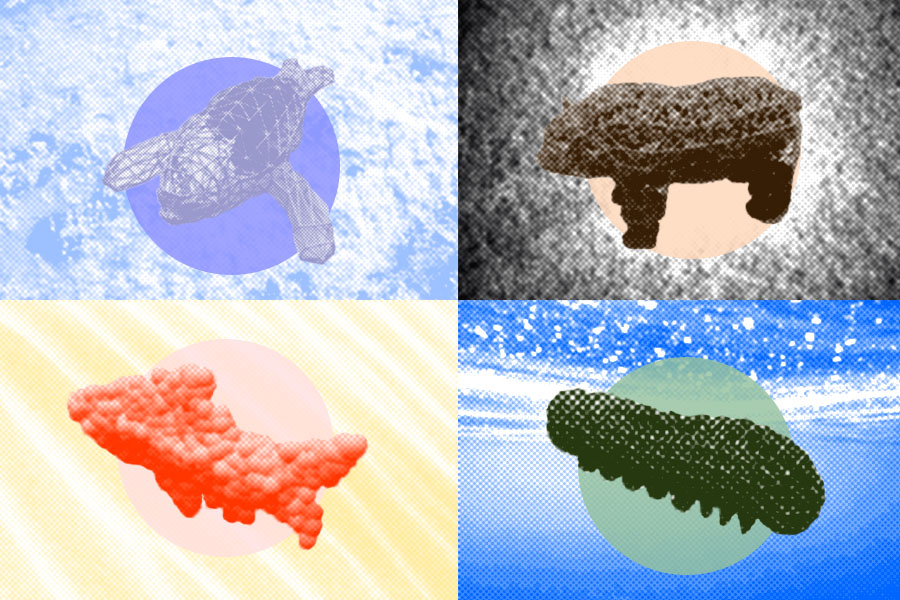 Les chercheurs ont développé un système de co-conception de robots mous, ce qui signifie rechercher et optimiser conjointement la conception de robots - la forme du robot, où mettre les muscles dans le corps du robot, la douceur du robot dans différentes régions du corps ; et en fonction de la conception du robot, la manière de le contrôler pour accomplir une tâche cible. (Image : Alex Shipps/MIT CSAIL et les chercheurs) En se promenant du côté sauvage, la plate-forme propose des modèles 3D d'animaux tels que des pandas, des poissons, des requins et des chenilles en tant que conceptions pouvant simuler des tâches de robotique douce comme la locomotion , virage agile et suivi de chemin dans différents environnements. Que ce soit par la neige, le désert, l'argile ou l'eau, la plate-forme démontre les compromis de performance de diverses conceptions sur différents terrains.
"Notre cadre peut aider les utilisateurs à trouver la meilleure configuration pour la forme d'un robot, leur permettant de concevoir des algorithmes de robotique souple qui peuvent faire beaucoup de choses différentes", explique Tsun-Hsuan Wang, doctorant au MIT, affilié au Laboratoire d'informatique et d'intelligence artificielle ( CSAIL) qui est chercheur principal du projet. "Essentiellement, cela nous aide à comprendre les meilleures stratégies pour que les robots interagissent avec leur environnement." SoftZoo est plus complet que des plates-formes similaires, qui simulent déjà la conception et le contrôle, car il modélise le mouvement qui réagit aux caractéristiques physiques de divers biomes. La polyvalence du cadre provient d'un moteur multiphysique différentiable, qui permet de simuler plusieurs aspects d'un système physique en même temps, comme un bébé phoque tournant sur la glace ou une chenille traversant un milieu humide. La différentiabilité du moteur optimise la co-conception en réduisant le nombre de simulations souvent coûteuses nécessaires pour résoudre les problèmes de contrôle informatique et de conception. En conséquence, les utilisateurs peuvent concevoir et déplacer des robots mous avec des algorithmes plus sophistiqués et spécifiés.
La capacité du système à simuler des interactions avec différents terrains illustre l'importance de la morphologie, une branche de la biologie qui étudie les formes, les tailles et les formes de différents organismes. Selon l'environnement, certaines structures biologiques sont plus optimales que d'autres, un peu comme comparer des plans pour des machines qui accomplissent des tâches similaires.
Ces contours biologiques peuvent inspirer une vie artificielle plus spécialisée et spécifique au terrain. "La géométrie légèrement ondulante d'une méduse lui permet de se déplacer efficacement à travers de grandes étendues d'eau, inspirant les chercheurs à développer de nouvelles races de robots mous et ouvrant des possibilités illimitées de ce dont les créatures artificielles cultivées entièrement in silico peuvent être capables", explique Wang. "De plus, les libellules peuvent effectuer des manœuvres très agiles que d'autres créatures volantes ne peuvent pas effectuer car elles ont des structures spéciales sur leurs ailes qui changent leur centre de masse lorsqu'elles volent. Notre plate-forme optimise la locomotion de la même manière qu'une libellule est naturellement plus apte à travailler dans son environnement. » Les robots avaient auparavant du mal à naviguer dans des environnements encombrés parce que leur corps n'était pas conforme à leur environnement. Avec SoftZoo, cependant, les concepteurs pourraient développer simultanément le cerveau et le corps du robot, co-optimisant les machines terrestres et aquatiques pour être plus conscients et spécialisés. Avec une intelligence comportementale et morphologique accrue, les robots seraient alors plus utiles pour mener à bien des missions de sauvetage et mener des explorations. Si une personne disparaissait lors d'une inondation, par exemple, le robot pourrait potentiellement traverser les eaux plus efficacement car il a été optimisé à l'aide de méthodes démontrées dans la plate-forme SotftZoo.
"SoftZoo fournit une simulation open source pour les concepteurs de robots mous, les aidant à construire des robots du monde réel beaucoup plus facilement et de manière flexible tout en accélérant les capacités de locomotion des machines dans divers environnements", ajoute le co-auteur de l'étude Chuang Gan, chercheur au MIT. -IBM Watson AI Lab qui sera bientôt professeur assistant à l'Université du Massachusetts à Amherst.
"Cette approche informatique de co-conception des corps de robots mous et de leurs cerveaux (c'est-à-dire leurs contrôleurs) ouvre la porte à la création rapide de machines personnalisées conçues pour une tâche spécifique", ajoute Daniela Rus, directrice de CSAIL et Andrew and Erna Viterbi Professeur au Département de génie électrique et d'informatique (EECS) du MIT, qui est un autre auteur de l'ouvrage.
Avant la construction de tout type de robot, le cadre pourrait remplacer les tests sur le terrain de scènes non naturelles. Par exemple, évaluer le comportement d'un robot ressemblant à un ours dans un désert peut être difficile pour une équipe de recherche travaillant dans les plaines urbaines de Boston. Au lieu de cela, les ingénieurs en robotique douce pourraient utiliser des modèles 3D dans SoftZoo pour simuler différentes conceptions et évaluer l'efficacité des algorithmes contrôlant leurs robots lors de la navigation. En retour, cela permettrait aux chercheurs d'économiser du temps et des ressources.
Pourtant, les limites des techniques de fabrication actuelles empêchent de donner vie à ces conceptions de robots mous. "Le transfert de la simulation au robot physique reste non résolu et nécessite une étude plus approfondie", déclare Wang. "Les modèles musculaires, la rigidité spatialement variable et la sensorisation dans SoftZoo ne peuvent pas être réalisés directement avec les techniques de fabrication actuelles, nous travaillons donc sur ces défis." A l'avenir, les concepteurs de la plateforme lorgnent sur des applications en mécanique humaine, comme la manipulation, compte tenu de sa capacité à tester le contrôle robotique. Pour démontrer ce potentiel, l'équipe de Wang a conçu un bras 3D lançant une boule de neige vers l'avant.
Les chercheurs ont développé un système de co-conception de robots mous, ce qui signifie rechercher et optimiser conjointement la conception de robots - la forme du robot, où mettre les muscles dans le corps du robot, la douceur du robot dans différentes régions du corps ; et en fonction de la conception du robot, la manière de le contrôler pour accomplir une tâche cible. (Image : Alex Shipps/MIT CSAIL et les chercheurs) En se promenant du côté sauvage, la plate-forme propose des modèles 3D d'animaux tels que des pandas, des poissons, des requins et des chenilles en tant que conceptions pouvant simuler des tâches de robotique douce comme la locomotion , virage agile et suivi de chemin dans différents environnements. Que ce soit par la neige, le désert, l'argile ou l'eau, la plate-forme démontre les compromis de performance de diverses conceptions sur différents terrains.
"Notre cadre peut aider les utilisateurs à trouver la meilleure configuration pour la forme d'un robot, leur permettant de concevoir des algorithmes de robotique souple qui peuvent faire beaucoup de choses différentes", explique Tsun-Hsuan Wang, doctorant au MIT, affilié au Laboratoire d'informatique et d'intelligence artificielle ( CSAIL) qui est chercheur principal du projet. "Essentiellement, cela nous aide à comprendre les meilleures stratégies pour que les robots interagissent avec leur environnement." SoftZoo est plus complet que des plates-formes similaires, qui simulent déjà la conception et le contrôle, car il modélise le mouvement qui réagit aux caractéristiques physiques de divers biomes. La polyvalence du cadre provient d'un moteur multiphysique différentiable, qui permet de simuler plusieurs aspects d'un système physique en même temps, comme un bébé phoque tournant sur la glace ou une chenille traversant un milieu humide. La différentiabilité du moteur optimise la co-conception en réduisant le nombre de simulations souvent coûteuses nécessaires pour résoudre les problèmes de contrôle informatique et de conception. En conséquence, les utilisateurs peuvent concevoir et déplacer des robots mous avec des algorithmes plus sophistiqués et spécifiés.
La capacité du système à simuler des interactions avec différents terrains illustre l'importance de la morphologie, une branche de la biologie qui étudie les formes, les tailles et les formes de différents organismes. Selon l'environnement, certaines structures biologiques sont plus optimales que d'autres, un peu comme comparer des plans pour des machines qui accomplissent des tâches similaires.
Ces contours biologiques peuvent inspirer une vie artificielle plus spécialisée et spécifique au terrain. "La géométrie légèrement ondulante d'une méduse lui permet de se déplacer efficacement à travers de grandes étendues d'eau, inspirant les chercheurs à développer de nouvelles races de robots mous et ouvrant des possibilités illimitées de ce dont les créatures artificielles cultivées entièrement in silico peuvent être capables", explique Wang. "De plus, les libellules peuvent effectuer des manœuvres très agiles que d'autres créatures volantes ne peuvent pas effectuer car elles ont des structures spéciales sur leurs ailes qui changent leur centre de masse lorsqu'elles volent. Notre plate-forme optimise la locomotion de la même manière qu'une libellule est naturellement plus apte à travailler dans son environnement. » Les robots avaient auparavant du mal à naviguer dans des environnements encombrés parce que leur corps n'était pas conforme à leur environnement. Avec SoftZoo, cependant, les concepteurs pourraient développer simultanément le cerveau et le corps du robot, co-optimisant les machines terrestres et aquatiques pour être plus conscients et spécialisés. Avec une intelligence comportementale et morphologique accrue, les robots seraient alors plus utiles pour mener à bien des missions de sauvetage et mener des explorations. Si une personne disparaissait lors d'une inondation, par exemple, le robot pourrait potentiellement traverser les eaux plus efficacement car il a été optimisé à l'aide de méthodes démontrées dans la plate-forme SotftZoo.
"SoftZoo fournit une simulation open source pour les concepteurs de robots mous, les aidant à construire des robots du monde réel beaucoup plus facilement et de manière flexible tout en accélérant les capacités de locomotion des machines dans divers environnements", ajoute le co-auteur de l'étude Chuang Gan, chercheur au MIT. -IBM Watson AI Lab qui sera bientôt professeur assistant à l'Université du Massachusetts à Amherst.
"Cette approche informatique de co-conception des corps de robots mous et de leurs cerveaux (c'est-à-dire leurs contrôleurs) ouvre la porte à la création rapide de machines personnalisées conçues pour une tâche spécifique", ajoute Daniela Rus, directrice de CSAIL et Andrew and Erna Viterbi Professeur au Département de génie électrique et d'informatique (EECS) du MIT, qui est un autre auteur de l'ouvrage.
Avant la construction de tout type de robot, le cadre pourrait remplacer les tests sur le terrain de scènes non naturelles. Par exemple, évaluer le comportement d'un robot ressemblant à un ours dans un désert peut être difficile pour une équipe de recherche travaillant dans les plaines urbaines de Boston. Au lieu de cela, les ingénieurs en robotique douce pourraient utiliser des modèles 3D dans SoftZoo pour simuler différentes conceptions et évaluer l'efficacité des algorithmes contrôlant leurs robots lors de la navigation. En retour, cela permettrait aux chercheurs d'économiser du temps et des ressources.
Pourtant, les limites des techniques de fabrication actuelles empêchent de donner vie à ces conceptions de robots mous. "Le transfert de la simulation au robot physique reste non résolu et nécessite une étude plus approfondie", déclare Wang. "Les modèles musculaires, la rigidité spatialement variable et la sensorisation dans SoftZoo ne peuvent pas être réalisés directement avec les techniques de fabrication actuelles, nous travaillons donc sur ces défis." A l'avenir, les concepteurs de la plateforme lorgnent sur des applications en mécanique humaine, comme la manipulation, compte tenu de sa capacité à tester le contrôle robotique. Pour démontrer ce potentiel, l'équipe de Wang a conçu un bras 3D lançant une boule de neige vers l'avant.
Les chercheurs ont développé un système de co-conception de robots mous, ce qui signifie rechercher et optimiser conjointement la conception de robots - la forme du robot, où mettre les muscles dans le corps du robot, la douceur du robot dans différentes régions du corps ; et en fonction de la conception du robot, la manière de le contrôler pour accomplir une tâche cible. (Image : Alex Shipps/MIT CSAIL et les chercheurs) En se promenant du côté sauvage, la plate-forme propose des modèles 3D d'animaux tels que des pandas, des poissons, des requins et des chenilles en tant que conceptions pouvant simuler des tâches de robotique douce comme la locomotion , virage agile et suivi de chemin dans différents environnements. Que ce soit par la neige, le désert, l'argile ou l'eau, la plate-forme démontre les compromis de performance de diverses conceptions sur différents terrains.
"Notre cadre peut aider les utilisateurs à trouver la meilleure configuration pour la forme d'un robot, leur permettant de concevoir des algorithmes de robotique souple qui peuvent faire beaucoup de choses différentes", explique Tsun-Hsuan Wang, doctorant au MIT, affilié au Laboratoire d'informatique et d'intelligence artificielle ( CSAIL) qui est chercheur principal du projet. "Essentiellement, cela nous aide à comprendre les meilleures stratégies pour que les robots interagissent avec leur environnement." SoftZoo est plus complet que des plates-formes similaires, qui simulent déjà la conception et le contrôle, car il modélise le mouvement qui réagit aux caractéristiques physiques de divers biomes. La polyvalence du cadre provient d'un moteur multiphysique différentiable, qui permet de simuler plusieurs aspects d'un système physique en même temps, comme un bébé phoque tournant sur la glace ou une chenille traversant un milieu humide. La différentiabilité du moteur optimise la co-conception en réduisant le nombre de simulations souvent coûteuses nécessaires pour résoudre les problèmes de contrôle informatique et de conception. En conséquence, les utilisateurs peuvent concevoir et déplacer des robots mous avec des algorithmes plus sophistiqués et spécifiés.
La capacité du système à simuler des interactions avec différents terrains illustre l'importance de la morphologie, une branche de la biologie qui étudie les formes, les tailles et les formes de différents organismes. Selon l'environnement, certaines structures biologiques sont plus optimales que d'autres, un peu comme comparer des plans pour des machines qui accomplissent des tâches similaires.
Ces contours biologiques peuvent inspirer une vie artificielle plus spécialisée et spécifique au terrain. "La géométrie légèrement ondulante d'une méduse lui permet de se déplacer efficacement à travers de grandes étendues d'eau, inspirant les chercheurs à développer de nouvelles races de robots mous et ouvrant des possibilités illimitées de ce dont les créatures artificielles cultivées entièrement in silico peuvent être capables", explique Wang. "De plus, les libellules peuvent effectuer des manœuvres très agiles que d'autres créatures volantes ne peuvent pas effectuer car elles ont des structures spéciales sur leurs ailes qui changent leur centre de masse lorsqu'elles volent. Notre plate-forme optimise la locomotion de la même manière qu'une libellule est naturellement plus apte à travailler dans son environnement. » Les robots avaient auparavant du mal à naviguer dans des environnements encombrés parce que leur corps n'était pas conforme à leur environnement. Avec SoftZoo, cependant, les concepteurs pourraient développer simultanément le cerveau et le corps du robot, co-optimisant les machines terrestres et aquatiques pour être plus conscients et spécialisés. Avec une intelligence comportementale et morphologique accrue, les robots seraient alors plus utiles pour mener à bien des missions de sauvetage et mener des explorations. Si une personne disparaissait lors d'une inondation, par exemple, le robot pourrait potentiellement traverser les eaux plus efficacement car il a été optimisé à l'aide de méthodes démontrées dans la plate-forme SotftZoo.
"SoftZoo fournit une simulation open source pour les concepteurs de robots mous, les aidant à construire des robots du monde réel beaucoup plus facilement et de manière flexible tout en accélérant les capacités de locomotion des machines dans divers environnements", ajoute le co-auteur de l'étude Chuang Gan, chercheur au MIT. -IBM Watson AI Lab qui sera bientôt professeur assistant à l'Université du Massachusetts à Amherst.
"Cette approche informatique de co-conception des corps de robots mous et de leurs cerveaux (c'est-à-dire leurs contrôleurs) ouvre la porte à la création rapide de machines personnalisées conçues pour une tâche spécifique", ajoute Daniela Rus, directrice de CSAIL et Andrew and Erna Viterbi Professeur au Département de génie électrique et d'informatique (EECS) du MIT, qui est un autre auteur de l'ouvrage.
Avant la construction de tout type de robot, le cadre pourrait remplacer les tests sur le terrain de scènes non naturelles. Par exemple, évaluer le comportement d'un robot ressemblant à un ours dans un désert peut être difficile pour une équipe de recherche travaillant dans les plaines urbaines de Boston. Au lieu de cela, les ingénieurs en robotique douce pourraient utiliser des modèles 3D dans SoftZoo pour simuler différentes conceptions et évaluer l'efficacité des algorithmes contrôlant leurs robots lors de la navigation. En retour, cela permettrait aux chercheurs d'économiser du temps et des ressources.
Pourtant, les limites des techniques de fabrication actuelles empêchent de donner vie à ces conceptions de robots mous. "Le transfert de la simulation au robot physique reste non résolu et nécessite une étude plus approfondie", déclare Wang. "Les modèles musculaires, la rigidité spatialement variable et la sensorisation dans SoftZoo ne peuvent pas être réalisés directement avec les techniques de fabrication actuelles, nous travaillons donc sur ces défis." A l'avenir, les concepteurs de la plateforme lorgnent sur des applications en mécanique humaine, comme la manipulation, compte tenu de sa capacité à tester le contrôle robotique. Pour démontrer ce potentiel, l'équipe de Wang a conçu un bras 3D lançant une boule de neige vers l'avant.
- Contenu propulsé par le référencement et distribution de relations publiques. Soyez amplifié aujourd'hui.
- PlatoAiStream. Intelligence des données Web3. Connaissance Amplifiée. Accéder ici.
- Frapper l'avenir avec Adryenn Ashley. Accéder ici.
- La source: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :possède
- :est
- :ne pas
- :où
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- capacité
- accélérer
- atteindre
- à travers
- Ajoute
- adopté
- Affiliation
- agile
- AI
- alex
- algorithmes
- Permettre
- permet
- déjà
- an
- et les
- Andrew
- animaux
- Une autre
- tous
- applications
- une approche
- SONT
- BRAS
- Avant-Bras
- artificiel
- intelligence artificielle
- AS
- aspects
- Évaluation
- Assistante gérante
- At
- auteur
- automatiquement
- Laines pour bébés
- basé
- BE
- Ours
- car
- était
- before
- LES MEILLEURS
- biologie
- corps
- boston
- tous les deux
- Cerveau
- cerveaux
- Branche
- Apporter
- construire
- Développement
- by
- CAN
- ne peut pas
- capacités
- capable
- Canaux centraux
- globaux
- difficile
- Change
- Coauteur
- vient
- comparant
- complet
- compléter
- complet
- ordinateur
- Informatique
- conduite
- configuration
- des bactéries
- contrôle
- pourriez
- La création
- CSAIL
- Courant
- sont adaptées
- Date
- démontrer
- démontré
- démontre
- Département
- Selon
- DÉSERT
- Conception
- un
- designers
- Avec nos Bagues Halo
- détermine
- développer
- développé
- développement
- différent
- Directeur
- plusieurs
- do
- Porte
- Libellules
- Libellule
- pendant
- même
- Efficace
- efficacement
- ingénierie électrique
- permet
- Moteur
- ENGINEERING
- Les ingénieurs
- entièrement
- Environment
- environnements
- essence
- évaluer
- Pourtant, la
- exemple
- cher
- exploration
- Fonctionnalités:
- champ
- Trouvez
- flexible
- inondation
- vol
- Abonnement
- Pour
- document
- Avant
- Framework
- De
- plus
- avenir
- générer
- géométrie
- donné
- saisir
- Vous avez
- aider
- aider
- aide
- Comment
- HTTPS
- humain
- VÉLO
- if
- illustre
- image
- importance
- l'amélioration de
- in
- Y compris
- increased
- Inspiration
- inspirer
- nous inspirer
- plutôt ;
- Intelligence
- interagir
- interactions
- IT
- SES
- jpg
- laboratoire
- laboratoire
- gros
- conduire
- VIE
- comme
- limites
- Style
- ressembler
- Les machines
- Manipulation
- de nombreuses
- Masse
- Massachusetts
- Mai..
- veux dire
- mécanique
- méthodes
- Milieu
- manquant
- missions
- MIT
- numériques jumeaux (digital twin models)
- PLUS
- mouvement
- Bougez
- mouvement
- beaucoup
- NAVIGUER
- Navigation
- Nouveauté
- nombre
- objets
- of
- souvent
- on
- ONE
- open source
- ouverture
- ouvre
- optimaux
- optimisé
- Optimise
- l'optimisation
- or
- Autre
- Autres
- nos
- grandes lignes
- chemin
- effectuer
- performant
- personne
- Physique
- plateforme
- Plateformes
- Platon
- Intelligence des données Platon
- PlatonDonnées
- possibilités
- défaillances
- l'éventualité
- précédemment
- d'ouvrabilité
- Professeur
- Projet
- fournit
- mettre
- rapidement
- Réagit
- monde réel
- réalisé
- réduire
- régions
- réhabilitation
- reste
- conditions
- a besoin
- sauver
- un article
- chercheur
- chercheurs
- Resources
- résultat
- systèmes de robot
- robotique
- Collaboratif
- même
- Épargnez
- dit
- Scènes
- Sciences
- Scientifique
- recherche
- plusieurs
- Forme
- formes
- Sharks
- côté
- similaires
- simulation
- simultanément
- depuis
- tailles
- neige
- So
- Soft
- RÉSOUDRE
- quelques
- disponible
- sophistiqué
- Identifier
- l'espace
- spécial
- spécialisé
- groupe de neurones
- spécifié
- empiler
- Utilisation d'un
- étapes
- Encore
- les stratégies
- Étudiant
- études
- Étude
- tel
- combustion propre
- prise
- Target
- Tâche
- tâches
- équipe
- techniques
- terrestre
- tester
- Essais
- que
- qui
- La
- El futuro
- leur
- Les
- puis
- Ces
- l'ont
- des choses
- this
- bien que?
- Avec
- Lancement
- fiable
- à
- Voyage
- TOUR
- Tournant
- type
- comprendre
- université
- illimité
- mobilier urbain
- us
- utilisé
- utilisateurs
- en utilisant
- divers
- très
- était
- Eau
- Eaux
- Watson
- Façon..
- we
- ont été
- Quoi
- quand
- que
- qui
- tout en
- WHO
- Sauvage
- Faune
- sera
- comprenant
- activités principales
- de travail
- pourra
- zéphyrnet
Plus de Nanowerk

Les scientifiques découvrent une nouvelle méthode pour générer des nanoparticules métalliques destinées à être utilisées comme catalyseurs
Nœud source: 3039388
Horodatage: Le 28 décembre 2023

L'IA et le CRISPR contrôlent avec précision l'expression des gènes
Nœud source: 2747420
Horodatage: Le 3 juillet 2023
Guider la conception de dispositifs en silicium avec une efficacité améliorée
Nœud source: 2839986
Horodatage: 23 août 2023
Les abeilles et les racines robotiques offrent l'espoir d'un environnement plus sain et d'une nourriture suffisante
Nœud source: 1977685
Horodatage: 25 février 2023

Un matériau en carbone de taille nanométrique pourrait être utilisé pour traiter le syndrome de Down
Nœud source: 2778869
Horodatage: Le 21 juillet 2023
Une synapse neuromorphique créée à partir de matériaux de base pour les téléviseurs OLED
Nœud source: 2541090
Horodatage: 24 Mar 2023

Accélérer les semi-conducteurs durables avec « l’encre multi-éléments »
Nœud source: 2911790
Horodatage: Le 28 septembre 2023
Nanocatalyseur alimenté par la lumière pour produire de l'hydrogène en utilisant la lumière du soleil
Nœud source: 3053672
Horodatage: Le 10 janvier 2024
Les scientifiques observent une transition vers un comportement chaotique à l'échelle du nanomètre
Nœud source: 1982382
Horodatage: 27 février 2023

Les robots et l'IA s'associent pour découvrir des catalyseurs hautement sélectifs
Nœud source: 1940293
Horodatage: 3 février 2023