29 مه 2023 (اخبار نانوورک) محققان دپارتمان علوم مکانیک و مهندسی زیستی در دانشگاه اوزاکا نوع جدیدی از ربات راه رفتن را اختراع کرده اند که از بی ثباتی دینامیکی برای جهت یابی بهره می برد. با تغییر انعطاف پذیری کوپلینگ ها، می توان ربات را بدون نیاز به سیستم های کنترل محاسباتی پیچیده به چرخش درآورد. این کار ممکن است به ایجاد ربات های نجاتی که قادر به عبور از زمین های ناهموار هستند کمک کند. اکثر جانوران روی زمین یک سیستم حرکتی قوی با استفاده از پاها ایجاد کردهاند که تحرک بالایی برای آنها در طیف وسیعی از محیطها فراهم میکند. تا حدودی ناامیدکننده است، مهندسانی که سعی کرده اند این رویکرد را تکرار کنند، اغلب دریافته اند که ربات های پا به طرز شگفت انگیزی شکننده هستند. شکستگی حتی یک پا به دلیل استرس مکرر می تواند توانایی این ربات ها را به شدت محدود کند. علاوه بر این، کنترل تعداد زیادی از مفاصل به طوری که ربات بتواند محیط های پیچیده را عرضی کند، نیاز به نیروی کامپیوتر زیادی دارد. بهبود در این طرح برای ساخت رباتهای مستقل یا نیمه خودمختار که میتوانند به عنوان وسایل نقلیه اکتشافی یا نجات و ورود به مناطق خطرناک عمل کنند، بسیار مفید خواهد بود.
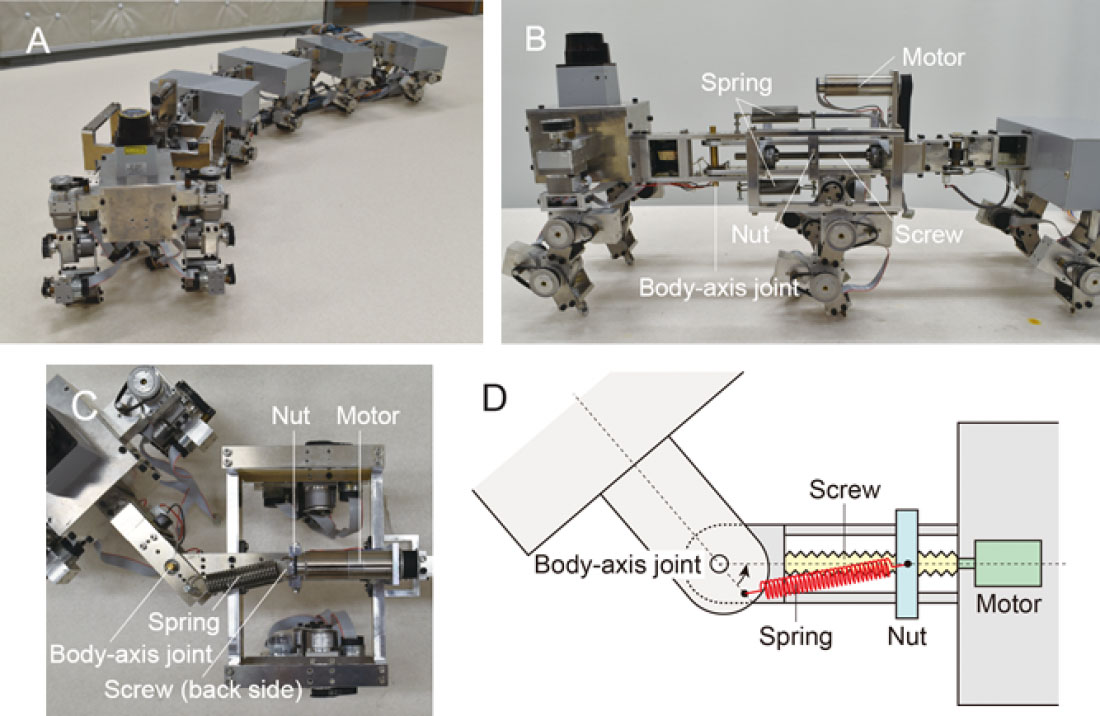 ربات Myriapod (A) و مکانیسم انعطاف پذیری محور بدنه متغیر (B. نمای جلو، C. نمای بالا، D. شماتیک از نمای بالا). (تصویر: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اکنون محققان دانشگاه اوزاکا یک ربات بیومیمتیک "myriapod" ساخته اند که از یک ناپایداری طبیعی بهره می برد که می تواند راه رفتن مستقیم را به حرکت منحنی تبدیل کند. در مطالعه ای که اخیراً در رباتیک نرم (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”محققان دانشگاه اوزاکا ربات خود را توصیف می کنند که از شش بخش (با دو پایه متصل به هر بخش) و مفاصل انعطاف پذیر تشکیل شده است. با استفاده از یک پیچ قابل تنظیم، انعطاف پذیری کوپلینگ ها را می توان با موتورها در طول حرکت راه رفتن تغییر داد. محققان نشان دادند که افزایش انعطاف پذیری مفاصل منجر به وضعیتی به نام "انشعاب چنگال" می شود که در آن راه رفتن مستقیم ناپایدار می شود. در عوض، ربات به سمت راست یا چپ به راه رفتن در یک الگوی منحنی تغییر می کند. به طور معمول، مهندسان سعی می کنند از ایجاد بی ثباتی جلوگیری کنند. با این حال، استفاده کنترل شده از آنها می تواند مانور کارآمد را امکان پذیر کند. شینیا آئوی، نویسنده این مطالعه میگوید: «ما از توانایی برخی حشرات بسیار چابک الهام گرفتهایم که به آنها اجازه میدهد تا بیثباتی دینامیکی را در حرکت خود کنترل کنند تا تغییرات حرکتی سریع ایجاد کنند. از آنجایی که این رویکرد مستقیماً حرکت محور بدن را هدایت نمیکند، بلکه انعطافپذیری را کنترل میکند، میتواند پیچیدگی محاسباتی و همچنین انرژی مورد نیاز را تا حد زیادی کاهش دهد.
ربات Myriapod (A) و مکانیسم انعطاف پذیری محور بدنه متغیر (B. نمای جلو، C. نمای بالا، D. شماتیک از نمای بالا). (تصویر: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اکنون محققان دانشگاه اوزاکا یک ربات بیومیمتیک "myriapod" ساخته اند که از یک ناپایداری طبیعی بهره می برد که می تواند راه رفتن مستقیم را به حرکت منحنی تبدیل کند. در مطالعه ای که اخیراً در رباتیک نرم (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”محققان دانشگاه اوزاکا ربات خود را توصیف می کنند که از شش بخش (با دو پایه متصل به هر بخش) و مفاصل انعطاف پذیر تشکیل شده است. با استفاده از یک پیچ قابل تنظیم، انعطاف پذیری کوپلینگ ها را می توان با موتورها در طول حرکت راه رفتن تغییر داد. محققان نشان دادند که افزایش انعطاف پذیری مفاصل منجر به وضعیتی به نام "انشعاب چنگال" می شود که در آن راه رفتن مستقیم ناپایدار می شود. در عوض، ربات به سمت راست یا چپ به راه رفتن در یک الگوی منحنی تغییر می کند. به طور معمول، مهندسان سعی می کنند از ایجاد بی ثباتی جلوگیری کنند. با این حال، استفاده کنترل شده از آنها می تواند مانور کارآمد را امکان پذیر کند. شینیا آئوی، نویسنده این مطالعه میگوید: «ما از توانایی برخی حشرات بسیار چابک الهام گرفتهایم که به آنها اجازه میدهد تا بیثباتی دینامیکی را در حرکت خود کنترل کنند تا تغییرات حرکتی سریع ایجاد کنند. از آنجایی که این رویکرد مستقیماً حرکت محور بدن را هدایت نمیکند، بلکه انعطافپذیری را کنترل میکند، میتواند پیچیدگی محاسباتی و همچنین انرژی مورد نیاز را تا حد زیادی کاهش دهد.
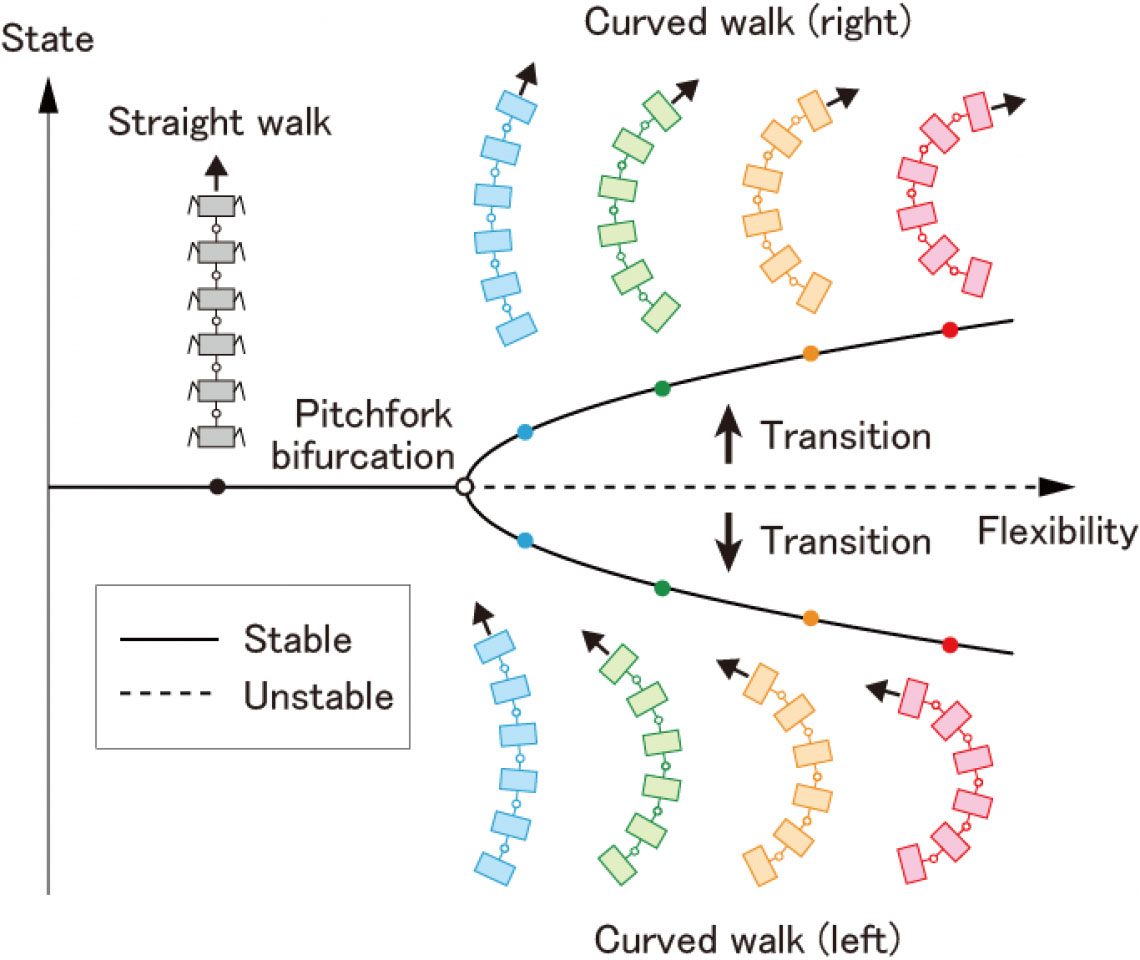 الگوهای راه رفتن پایدار و ناپایدار بسته به انعطاف پذیری محور بدن. (تصویر: CC BY-NC، 2023، Aoi et al., Soft Robotics) این تیم توانایی ربات را برای رسیدن به مکان های خاص آزمایش کردند و دریافتند که می تواند با طی کردن مسیرهای منحنی به سمت اهداف حرکت کند. مائو آداچی، یکی دیگر از نویسندگان مطالعه، می گوید: «ما می توانیم کاربردها را در سناریوهای مختلف، مانند جستجو و نجات، کار در محیط های خطرناک یا اکتشاف در سیارات دیگر پیش بینی کنیم. نسخه های آینده ممکن است شامل بخش های اضافی و مکانیسم های کنترلی باشد.
الگوهای راه رفتن پایدار و ناپایدار بسته به انعطاف پذیری محور بدن. (تصویر: CC BY-NC، 2023، Aoi et al., Soft Robotics) این تیم توانایی ربات را برای رسیدن به مکان های خاص آزمایش کردند و دریافتند که می تواند با طی کردن مسیرهای منحنی به سمت اهداف حرکت کند. مائو آداچی، یکی دیگر از نویسندگان مطالعه، می گوید: «ما می توانیم کاربردها را در سناریوهای مختلف، مانند جستجو و نجات، کار در محیط های خطرناک یا اکتشاف در سیارات دیگر پیش بینی کنیم. نسخه های آینده ممکن است شامل بخش های اضافی و مکانیسم های کنترلی باشد.
ربات Myriapod (A) و مکانیسم انعطاف پذیری محور بدنه متغیر (B. نمای جلو، C. نمای بالا، D. شماتیک از نمای بالا). (تصویر: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اکنون محققان دانشگاه اوزاکا یک ربات بیومیمتیک "myriapod" ساخته اند که از یک ناپایداری طبیعی بهره می برد که می تواند راه رفتن مستقیم را به حرکت منحنی تبدیل کند. در مطالعه ای که اخیراً در رباتیک نرم (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”محققان دانشگاه اوزاکا ربات خود را توصیف می کنند که از شش بخش (با دو پایه متصل به هر بخش) و مفاصل انعطاف پذیر تشکیل شده است. با استفاده از یک پیچ قابل تنظیم، انعطاف پذیری کوپلینگ ها را می توان با موتورها در طول حرکت راه رفتن تغییر داد. محققان نشان دادند که افزایش انعطاف پذیری مفاصل منجر به وضعیتی به نام "انشعاب چنگال" می شود که در آن راه رفتن مستقیم ناپایدار می شود. در عوض، ربات به سمت راست یا چپ به راه رفتن در یک الگوی منحنی تغییر می کند. به طور معمول، مهندسان سعی می کنند از ایجاد بی ثباتی جلوگیری کنند. با این حال، استفاده کنترل شده از آنها می تواند مانور کارآمد را امکان پذیر کند. شینیا آئوی، نویسنده این مطالعه میگوید: «ما از توانایی برخی حشرات بسیار چابک الهام گرفتهایم که به آنها اجازه میدهد تا بیثباتی دینامیکی را در حرکت خود کنترل کنند تا تغییرات حرکتی سریع ایجاد کنند. از آنجایی که این رویکرد مستقیماً حرکت محور بدن را هدایت نمیکند، بلکه انعطافپذیری را کنترل میکند، میتواند پیچیدگی محاسباتی و همچنین انرژی مورد نیاز را تا حد زیادی کاهش دهد.
الگوهای راه رفتن پایدار و ناپایدار بسته به انعطاف پذیری محور بدن. (تصویر: CC BY-NC، 2023، Aoi et al., Soft Robotics) این تیم توانایی ربات را برای رسیدن به مکان های خاص آزمایش کردند و دریافتند که می تواند با طی کردن مسیرهای منحنی به سمت اهداف حرکت کند. مائو آداچی، یکی دیگر از نویسندگان مطالعه، می گوید: «ما می توانیم کاربردها را در سناریوهای مختلف، مانند جستجو و نجات، کار در محیط های خطرناک یا اکتشاف در سیارات دیگر پیش بینی کنیم. نسخه های آینده ممکن است شامل بخش های اضافی و مکانیسم های کنترلی باشد.
- محتوای مبتنی بر SEO و توزیع روابط عمومی. امروز تقویت شوید.
- PlatoAiStream. Web3 Data Intelligence دانش تقویت شده دسترسی به اینجا.
- ضرب کردن آینده با آدرین اشلی. دسترسی به اینجا.
- خرید و فروش سهام در شرکت های PRE-IPO با PREIPO®. دسترسی به اینجا.
- منبع: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :نه
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- توانایی
- قادر
- عمل
- اضافه
- اضافی
- تنظیم پذیر
- مزیت - فایده - سود - منفعت
- فرز
- AL
- اجازه می دهد تا
- an
- و
- حیوانات
- دیگر
- برنامه های کاربردی
- روش
- هستند
- مناطق
- AS
- همکاری
- At
- تلاش
- نویسنده
- خود مختار
- اجتناب از
- محور
- BE
- زیرا
- شود
- بدن
- هر دو
- تفکیک
- بنا
- اما
- by
- نام
- CAN
- مرکز
- معین
- تبادل
- متغیر
- پیچیده
- پیچیدگی
- کامپیوتر
- قدرت کامپیوتر
- متصل
- کنترل
- کنترل
- کنترل
- گروه شاهد
- تبدیل
- میتوانست
- ایجاد
- ایجاد
- خطرناک
- تاریخ
- درجه
- بخش
- بستگی دارد
- توصیف
- طرح
- توسعه
- مستقیما
- میکند
- دو
- در طی
- پویا
- E&T
- هر
- زمین
- موثر
- هر دو
- قادر ساختن
- انرژی
- مورد تأیید
- وارد
- محیط
- حتی
- تکامل
- اکتشاف
- خیلی
- انعطاف پذیری
- قابل انعطاف
- برای
- یافت
- از جانب
- جلو
- تابع
- آینده
- Go
- تا حد زیادی
- آیا
- زیاد
- اما
- HTTPS
- تصویر
- ارتقاء
- in
- شامل
- افزایش
- الهام بخش
- بی ثباتی
- در عوض
- به
- اختراع
- محققان
- IT
- JPG
- نوع
- بزرگ
- رهبری
- ترک کرد
- پاها
- محدود
- مکان
- خیلی
- ساخته
- ساخت
- ممکن است..
- مکانیکی
- مکانیزم
- مکانیسم
- متوسط
- تحرک
- اصلاح شده
- اکثر
- حرکت
- موتورز
- جنبش
- طبیعی
- هدایت
- نیاز
- جدید
- به طور معمول
- اکنون
- عدد
- of
- غالبا
- on
- ONE
- or
- دیگر
- روی
- خود
- الگو
- الگوهای
- سیارات
- افلاطون
- هوش داده افلاطون
- PlatoData
- قدرت
- فراهم می کند
- منتشر شده
- سریع
- محدوده
- نسبتا
- رسیدن به
- تازه
- كاهش دادن
- مکرر
- مورد نیاز
- نیاز
- نجات
- محققان
- راست
- ربات
- رباتیک
- ربات ها
- تنومند
- می گوید:
- سناریوها
- علم
- جستجو
- بخش
- بخش ها
- به شدت، شدیدا
- نشان داد
- وضعیت
- شش
- So
- نرم
- تاحدی
- خاص
- پایدار
- راست
- فشار
- مهاجرت تحصیلی
- چنین
- سیستم
- سیستم های
- طول می کشد
- مصرف
- اهداف
- تیم
- که
- La
- شان
- آنها
- اینها
- این
- به
- بالا
- نسبت به
- گذار
- امتحان
- دور زدن
- دو
- دانشگاه
- استفاده کنید
- با استفاده از
- تنوع
- وسایل نقلیه
- از طريق
- چشم انداز
- راه رفتن
- خوب
- بود
- که
- WHO
- وسیع
- دامنه گسترده
- با
- بدون
- مهاجرت کاری
- کارگر
- خواهد بود
- زفیرنت
بیشتر از نانورک


ادغام رباتهای مبتنی بر اوریگامی که حس میکنند، تصمیم میگیرند و پاسخ میدهند
گره منبع: 2565107
تمبر زمان: آوریل 4، 2023
هتروساختارهای دو بعدی / شبه دو بعدی مبتنی بر پروسکایت: ساخت و ساز، خواص و کاربردها
گره منبع: 1938788
تمبر زمان: فوریه 3، 2023

محققان خواصی را که قبلاً هرگز دیده نشده بود در خانواده ای از فلزات ابررسانا کاگوم شرح می دهند
گره منبع: 1952937
تمبر زمان: فوریه 11، 2023
مدارهای فوتونیک یکپارچه می توانند به بستن «شکاف تراهرتز» کمک کنند
گره منبع: 1899339
تمبر زمان: ژان 14، 2023

چگونه یک نانوکاتالیست مس رکورد شکن CO2 را به سوخت مایع تبدیل می کند
گره منبع: 1961058
تمبر زمان: فوریه 16، 2023