Esta breve publicación describe algunas mejoras de la estación láser que hicimos para poder ejecutar nuestros experimentos de forma remota.
Problemas de configuración
Nuestra plataforma de inyección de fallas láser está hecha de un microscopio que se usa para enfocar una fuente láser hacia un dispositivo bajo prueba. Está equipado con una cámara infrarroja para observar la arquitectura interna del chip objetivo y ajustar la forma del rayo láser. Afortunadamente, está equipado con una etapa motorizada que permite mover el rayo láser a través del chip desde nuestra aplicación de software personalizada. Todas las herramientas que desarrollamos se ejecutan en el sistema operativo Linux y, por lo tanto, es posible usarlas a través de una conexión SSH, siempre que tenga una buena conexión a Internet. Enfrentamos algunos problemas de latencia relacionados con la imagen en vivo de la cámara del microscopio, que resolvimos rápidamente activando la opción de compresión SSH (-C) que no está habilitado de forma predeterminada y reduce en gran medida el ancho de banda de transmisión requerido. No obstante, en su momento algunos elementos aún requerían intervención in situ:
- Control de la fuente de luz de la cámara: un equipo dedicado proporciona luz infrarroja para iluminar el chip para la visualización de la cámara.
- Apertura o cierre del obturador mecánico de la cámara: este obturador forma parte del microscopio y debe estar cerrado cuando se utiliza el láser.
- Cambio del objetivo del microscopio: 4 objetivos ópticos diferentes están montados en una torreta giratoria mecánica y permiten diferentes aumentos del microscopio.
A continuación se detalla cómo personalizamos nuestro banco de pruebas para controlar de forma remota el obturador y la fuente de luz. En particular, queríamos limitar el costo de esas adaptaciones y ponerlas a disposición lo antes posible.
Control de la fuente de luz
El sustrato de silicio de los semiconductores es semitransparente a la luz infrarroja y, por lo tanto, con una cámara infrarroja es posible observar la estructura interna de los circuitos. Para hacer posible la observación, el circuito debe estar iluminado con una fuente de luz infrarroja. Nuestro microscopio láser se envió con un equipo de fuente de luz dedicado, un Hayashi LA-150CE, que tiene un interruptor de encendido y una perilla para ajustar la intensidad de la luz, como se muestra a continuación. Cuando se inicia una campaña de pruebas con láser, generalmente apagamos la fuente de luz, ya que puede interferir con los componentes, especialmente cuando las muestras se diluyen.

Mirando la parte trasera del equipo, encontramos que se disponía de un interruptor “remoto” y un conector externo. Entendimos que esta fuente de luz ofrece capacidad de control remoto a través de algún conector del milenio pasado. Se puede encontrar poca documentación en la web, pero identificamos en un catálogo de Hayashi que existe un Unidad de control LAN compatible con esta fuente de luz. Sin embargo, este producto está descontinuado. Además, la conectividad LAN no es muy conveniente. En el mismo catálogo, encontramos la especificación para el conector de la fuente de luz. Aunque no es muy detallado, fue suficiente para probar esto.
Pinout del control remoto del catálogo de productos Hayashi: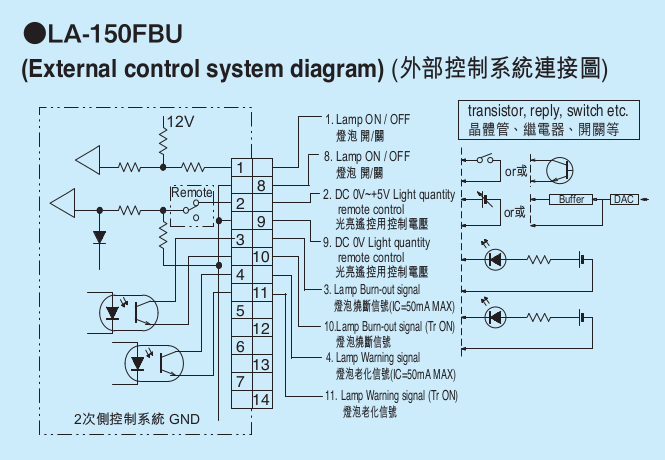
Esta interfaz proporciona dos características interesantes principales:
- Los pines digitales 1 y 8 se pueden usar para encender y apagar la lámpara acortándolos o no. El pin 8 es en realidad el suelo, por lo que solo el pin 1 es realmente relevante.
- El pin analógico 2 controla la intensidad de la luz con una señal que va desde 0 V (intensidad mínima) a 5 V (intensidad máxima). Cuando el modo remoto está habilitado, el potenciómetro del panel frontal se omite y la intensidad de la luz se controla directamente mediante este pin.
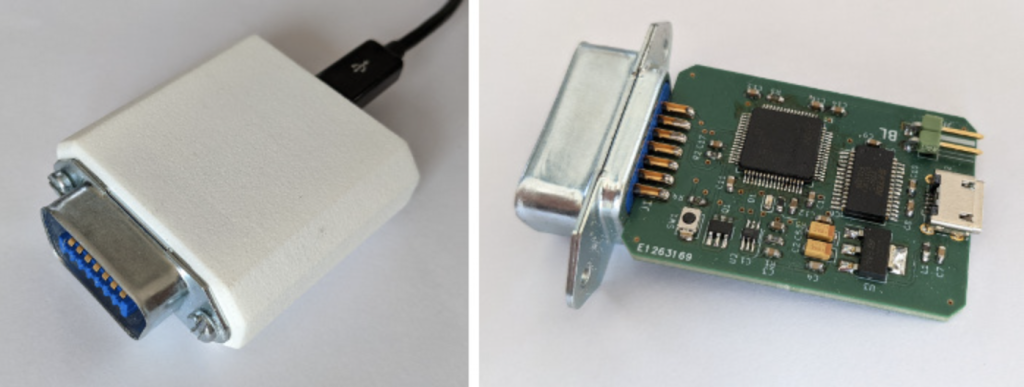
Decidimos construir desde cero nuestro propio Controlador remoto de luz Hayashi usando las siguientes partes:
- Un microcontrolador STM32 para alojar el código de la aplicación integrada,
- Un convertidor de USB a serie FT232 para permitir controlar el dongle desde el USB,
- Un convertidor de digital a analógico AD5621B para la generación de señales analógicas de 0 a 5 V para controlar la intensidad de la luz.
Diseñamos la PCB usando KiCad. Para ser honesto, este diseño puede estar un poco sobredimensionado: el microcontrolador es demasiado grande para la necesidad actual, y el FT232 puede eliminarse ya que los dispositivos STM32 ya tienen capacidades USB, a costa del tiempo de desarrollo del software. Nuestro objetivo era hacerlo rápido y sucio y reutilizar algunos de nuestros esquemas ya diseñados.
Por diversión, y porque creemos que este es un lenguaje muy prometedor, desarrollamos el firmware del microcontrolador en Rust.
Finalmente diseñamos una caja de plástico simple usando FreeCAD, y lo imprimimos con esculpir.
Inesperadamente, la parte más difícil de este proyecto fue identificar el conector (referencia 5710140 de Amphenol para el lado macho), y también comprarlo ya que está obsoleto y muchos proveedores ya no lo venden. El buscador de proveedores de piezas octoparte va a ayudar.
Todos los esquemas y archivos de diseño están disponibles en nuestro Repositorio GitHub.
Controlar el obturador de la cámara
En el microscopio, el rayo láser y la cámara comparten el mismo camino óptico. Cuando el láser dispara, una fracción de la luz es reflejada por el silicio e incide en la cámara. Para evitar daños en el sensor que pueden resultar en píxeles muertos a largo plazo, se puede cerrar un obturador óptico mecánico frente a la cámara. El obturador es manual y requiere poca o ninguna fuerza para ser accionado.
Para hacer posible el control remoto, compramos un pequeño motor paso a paso y un Controlador de motor paso a paso TIC T834 de Polulu. Desarrollamos e imprimimos engranajes 3D y un cuerpo para ser montado en el microscopio, con el fin de mover el obturador con el motor.
TIC T834 requiere una fuente de alimentación para proporcionar energía al motor, pero como nuestro motor no consume mucha corriente, cortamos la fuente de alimentación USB del T834 para alimentar el motor también. Los controladores TIC son muy fáciles de configurar y usar, están bien documentados y nos tomó muy poco tiempo controlar el motor desde nuestras herramientas de software. Desarrollamos una pequeña clase de controlador en Python ahora integrada en nuestro pystags biblioteca.
Los controladores de motores paso a paso necesitan averiguar la posición actual del motor cuando se enciende. Esto se hace con un procedimiento de inicialización donde el motor girará hasta que un interruptor de contacto le diga al controlador que el motor está en la posición cero. Usamos un interruptor simple conectado directamente al T834 que tiene esta función incorporada.
La parte del cuerpo en 3D que imprimimos no era muy precisa y los dos engranajes no funcionaban correctamente la primera vez. Usando calor pudimos doblar ligeramente la parte de plástico para corregir el espacio entre los engranajes. ¡Después de algunos ajustes, pudimos abrir y cerrar remotamente el obturador de la cámara perfectamente!
El diseño mecánico está disponible en nuestro Repositorio GitHub.
Reflexiones finales
La integración del control de la fuente de luz y el obturador de la cámara nos permitió ejecutar muchas campañas de prueba de láser de forma remota. También es más conveniente que antes, ya que cerrar el obturador y apagar la luz ahora se puede hacer automáticamente cuando se enciende el láser, mientras que antes requería la intervención física humana y podía olvidarse fácilmente.
En cuanto al control de la torreta de objetivos, ya existen torretas motorizadas, pero desafortunadamente son bastante caras y pueden ser difíciles de reemplazar. Por el momento, no encontramos ninguna solución sencilla y de bajo coste. Girar la torreta con un motor externo es difícil, especialmente porque hay un resorte que bloquea la torreta en su lugar cuando el objetivo está alineado con el microscopio. Además, el peso que podemos añadir al escenario motorizado es limitado. Esto sigue siendo un problema abierto en este momento, pero no impide trabajar de forma remota, solo estamos limitados a una ampliación seleccionada.
Finalmente, reemplazar la muestra cuando está rota aún requiere acceso al laboratorio. Afortunadamente, no sucede con demasiada frecuencia. Eventualmente, podemos multiplexar muchos circuitos en una sola placa secundaria, por lo que podemos quemar algunos dispositivos antes de necesitar un reemplazo físico, pero no desarrollamos tal solución.

- Distribución de relaciones públicas y contenido potenciado por SEO. Consiga amplificado hoy.
- PlatoAiStream. Inteligencia de datos Web3. Conocimiento amplificado. Accede Aquí.
- Acuñando el futuro con Adryenn Ashley. Accede Aquí.
- Compra y Vende Acciones en Empresas PRE-IPO con PREIPO®. Accede Aquí.
- Fuente: https://www.ledger.com/blog/laser-improvements
- :posee
- :es
- :no
- :dónde
- 1
- 14
- 24
- 3d
- 8
- a
- Poder
- de la máquina
- preciso
- a través de
- Adaptaciones
- add
- ajustes
- Después
- alineado
- Todos
- permitir
- permite
- ya haya utilizado
- también
- an
- y
- cualquier
- nunca más
- Aplicación
- arquitectura
- somos
- AS
- At
- automáticamente
- Hoy Disponibles
- Ancho de banda
- BE
- Manga
- porque
- antes
- CREEMOS
- a continuación
- entre
- Big
- Poco
- cuerpo
- compró
- Roto
- build
- incorporado
- quemar
- pero
- by
- cámara
- Campaña
- Campañas
- PUEDEN
- capacidades
- catalogar
- chip
- clase
- Cerrar
- cerrado
- cierre
- código
- compatible
- componentes
- conectado
- conexión
- Conectividad
- contacte
- control
- controlado
- controlador
- CONTROL
- controles
- Conveniente
- correcta
- Cost
- podría
- Current
- personalizado
- se adaptan
- muerto
- tratar
- decidido
- a dedicados
- Predeterminado
- Diseño
- diseñado
- detallado
- desarrollar
- desarrollado
- Desarrollo
- dispositivo
- Dispositivos
- HIZO
- una experiencia diferente
- difícil
- directamente
- documentación
- sí
- hecho
- DE INSCRIPCIÓN
- dibujar
- durante
- pasan fácilmente
- de forma sencilla
- elementos
- integrado
- facilita
- energía
- mejoras
- suficientes
- equipo
- equipado
- especialmente
- finalmente
- existe
- existe
- costoso
- experimentos
- externo
- enfrentado
- fallas
- Feature
- Caracteristicas
- pocos
- archivos
- Finalmente
- Encuentre
- Nombre
- primer vez
- Focus
- siguiendo
- FORCE
- olvidado
- Afortunadamente
- encontrado
- fracción
- Desde
- frontal o trasero
- diversión
- brecha
- generación de AHSS
- objetivo
- candidato
- muy
- Polo a Tierra
- suceder
- Difícil
- Tienen
- ayuda
- Golpear
- fortaleza
- Cómo
- Sin embargo
- HTTPS
- humana
- no haber aun identificado una solucion para el problema
- identificar
- imagen
- in
- COMPLETAMENTE
- interesante
- Interfaz
- interferir
- interno
- Internet
- conexión a Internet
- intervención
- cuestiones
- IT
- solo
- el lab
- idioma
- láser
- Estado latente
- problemas de latencia
- Libro mayor
- Biblioteca
- luz
- LIMITE LAS
- Limitada
- Linux
- pequeño
- para vivir
- Cabellos
- Largo
- Lote
- de bajo costo
- hecho
- Inicio
- para lograr
- Realizar
- manual
- muchos
- max-ancho
- máximas
- Puede..
- mecánico
- Microscopio
- Millennium
- mínimo
- Moda
- momento
- más,
- MEJOR DE TU
- Motor
- movimiento
- emocionante
- debe
- ¿ Necesita ayuda
- necesidad
- no
- ahora
- objetivo
- ,
- observar
- obsoleto
- of
- off
- Ofertas
- a menudo
- on
- , solamente
- habiertos
- funcionamiento
- sistema operativo
- Optión
- or
- solicite
- nuestros
- salir
- pandemia
- panel
- parte
- particular
- partes
- pasado
- camino
- los libros físicos
- patas
- Colocar
- plástico
- plataforma
- Platón
- Inteligencia de datos de Platón
- PlatónDatos
- posición
- posible
- Publicación
- industria
- Fuente de Energía
- alimentado
- evitar
- Producto
- Productos
- proyecto
- prometedor
- proporcionar
- previsto
- proporciona un
- comprar
- Python
- Búsqueda
- con rapidez
- que van
- realmente
- reduce
- refleja
- sanaciones
- Remoto
- reemplazar
- reemplazo
- Requisitos
- requiere
- resultado
- reutilizar
- Ejecutar
- Herrumbre
- mismo
- Buscar
- seleccionado
- Semiconductores
- Configure
- Forma
- Compartir
- transportado
- disparo
- En Corto
- en corto
- cortocircuito
- lado
- Signal
- Silicio
- sencillos
- desde
- soltero
- chica
- So
- Software
- Desarrollo de software ad-hoc
- vendido
- a medida
- algo
- Pronto
- Fuente
- especificación
- Girar
- primavera
- Etapa
- fundó
- estación
- Sin embargo
- STM32
- en streaming
- estructura
- tal
- proveedores
- suministro
- Switch
- te
- afectados
- decirles
- test
- Pruebas
- que
- esa
- El
- Les
- Ahí.
- por lo tanto
- ellos
- así
- aquellos
- ¿aunque?
- A través de esta formación, el personal docente y administrativo de escuelas y universidades estará preparado para manejar los recursos disponibles que derivan de la diversidad cultural de sus estudiantes. Además, un mejor y mayor entendimiento sobre estas diferencias y similitudes culturales permitirá alcanzar los objetivos de inclusión previstos.
- equipo
- a
- demasiado
- se
- try
- Convertido
- Turning
- dos
- bajo
- entendido
- Desafortunadamente
- hasta
- us
- usb
- utilizan el
- usado
- usando
- generalmente
- muy
- visualización
- deseado
- fue
- we
- web
- peso
- WELL
- tuvieron
- cuando
- que
- seguirá
- trabajando
- trabajando de forma remota
- aún
- Usted
- zephyrnet
- cero