29 Μαΐου 2023 (Ειδήσεις Nanowerk) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
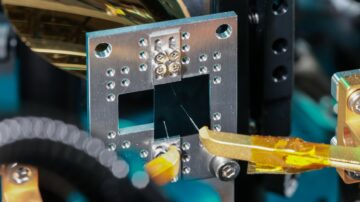
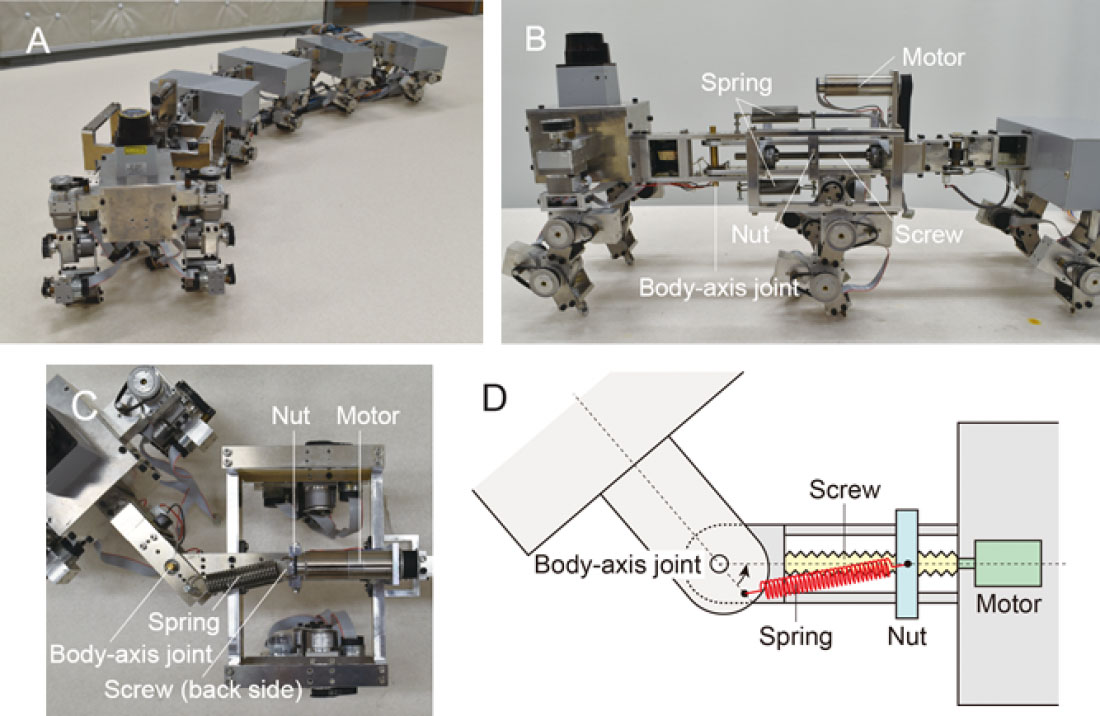 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Μαλακή ρομποτική (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Μαλακή ρομποτική (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
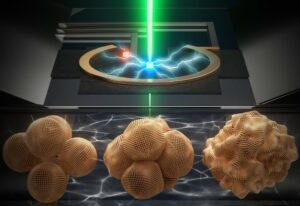
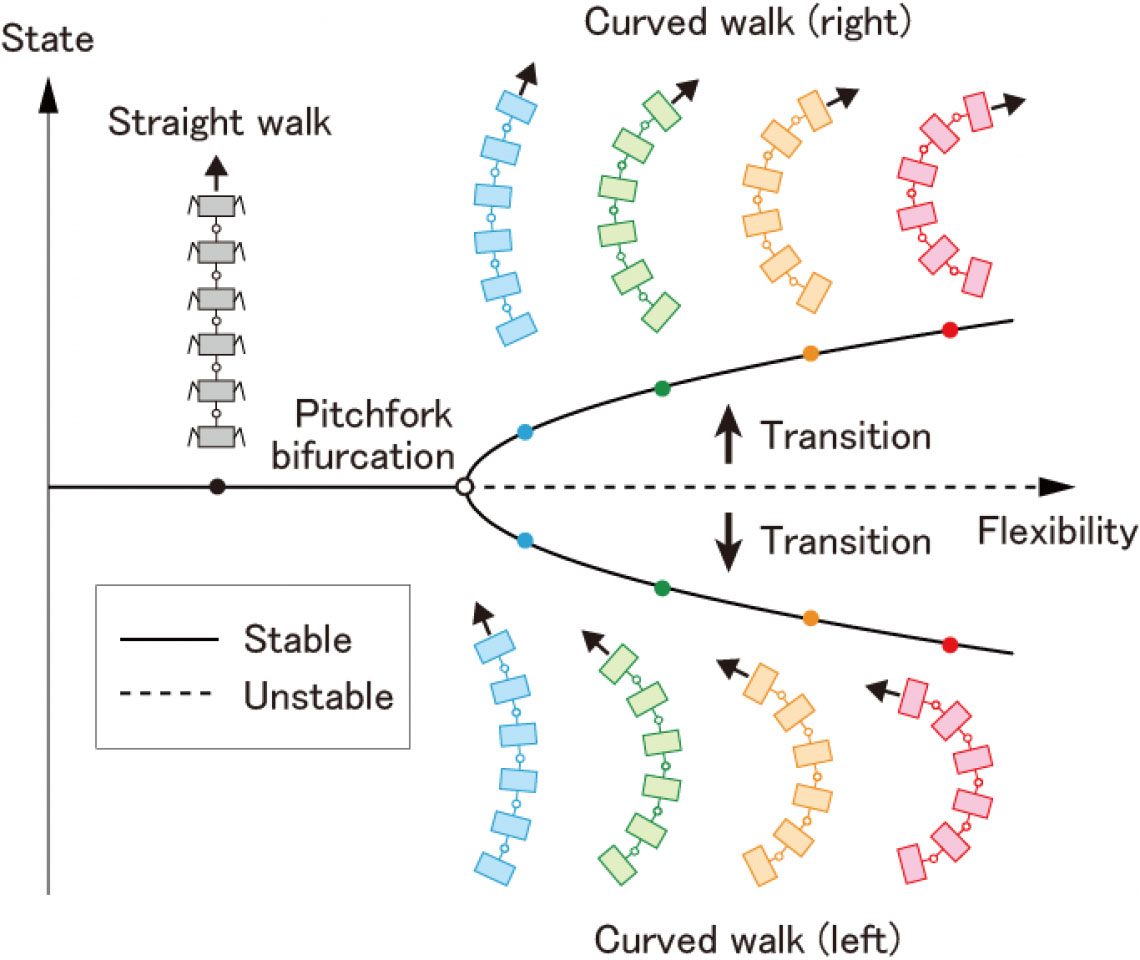 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Μαλακή ρομποτική (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- SEO Powered Content & PR Distribution. Ενισχύστε σήμερα.
- PlatoAiStream. Web3 Data Intelligence. Ενισχύθηκε η γνώση. Πρόσβαση εδώ.
- Minting the Future με την Adryenn Ashley. Πρόσβαση εδώ.
- Αγορά και πώληση μετοχών σε εταιρείες PRE-IPO με το PREIPO®. Πρόσβαση εδώ.
- πηγή: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :δεν
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- ικανότητα
- Ικανός
- Πράξη
- Επιπλέον
- Πρόσθετος
- ρυθμιζόμενο
- Πλεονέκτημα
- ευκίνητος
- AL
- επιτρέπει
- an
- και
- αγελάδων
- Άλλος
- εφαρμογές
- πλησιάζω
- ΕΙΝΑΙ
- περιοχές
- AS
- βοηθήσει
- At
- προσπάθεια
- συγγραφέας
- αυτονόμος
- αποφύγετε
- Άξονας
- BE
- επειδή
- γίνεται
- σώμα
- και οι δύο
- Ανάλυση
- Κτίριο
- αλλά
- by
- που ονομάζεται
- CAN
- Κέντρο
- ορισμένες
- Αλλαγές
- αλλαγή
- συγκρότημα
- περίπλοκο
- υπολογιστή
- ισχύς υπολογιστή
- συνδεδεμένος
- έλεγχος
- ελέγχεται
- τον έλεγχο
- ελέγχους
- μετατρέψετε
- θα μπορούσε να
- δημιουργία
- δημιουργία
- Επικίνδυνες
- Ημερομηνία
- Πτυχίο
- Τμήμα
- Σε συνάρτηση
- περιγράφουν
- Υπηρεσίες
- αναπτύχθηκε
- κατευθείαν
- κάνει
- δυο
- κατά την διάρκεια
- δυναμικός
- Ε & Τ
- κάθε
- γη
- αποτελεσματικός
- είτε
- ενεργοποιήσετε
- ενέργεια
- Μηχανικοί
- εισάγετε
- περιβάλλοντα
- Even
- εξελίχθηκε
- εξερεύνηση
- εξαιρετικά
- Ευελιξία
- εύκαμπτος
- Για
- Βρέθηκαν
- από
- εμπρός
- λειτουργία
- μελλοντικός
- Go
- σε μεγάλο βαθμό
- Έχω
- Ψηλά
- Ωστόσο
- HTTPS
- εικόνα
- βελτιώσεις
- in
- περιλαμβάνουν
- αύξηση
- εμπνευσμένος
- αστάθεια
- αντί
- σε
- Επινοηθείσα
- Ερευνητές
- IT
- jpg
- Είδος
- large
- Led
- αριστερά
- πόδια
- LIMIT
- θέσεις
- Παρτίδα
- που
- Κατασκευή
- Ενδέχεται..
- μηχανικός
- μηχανισμός
- μηχανισμούς
- Μέσο
- κινητικότητα
- τροποποιημένο
- πλέον
- κίνηση
- Motors
- κίνηση
- Φυσικό
- Πλοηγηθείτε
- Ανάγκη
- Νέα
- Κανονικά
- τώρα
- αριθμός
- of
- συχνά
- on
- ONE
- or
- ΑΛΛΑ
- επί
- δική
- πρότυπο
- πρότυπα
- Πλανήτες
- Πλάτων
- Πληροφορία δεδομένων Plato
- Πλάτωνα δεδομένα
- δύναμη
- παρέχει
- δημοσιεύθηκε
- Γρήγορα
- σειρά
- μάλλον
- φθάσουν
- πρόσφατα
- μείωση
- επανειλημμένες
- απαιτήσεις
- Απαιτεί
- διάσωση
- ερευνητές
- δεξιά
- ρομπότ
- ρομποτική
- ρομπότ
- εύρωστος
- λέει
- σενάρια
- Επιστήμη
- Αναζήτηση
- τμήμα
- τμήματα
- σοβαρά
- έδειξε
- κατάσταση
- ΕΞΙ
- So
- Μαλακός
- κάπως
- συγκεκριμένες
- σταθερός
- ευθεία
- στρες
- Μελέτη
- τέτοιος
- σύστημα
- συστήματα
- παίρνει
- λήψη
- στόχους
- ότι
- Η
- τους
- Τους
- Αυτοί
- αυτό
- προς την
- κορυφή
- προς
- μεταβάσεις
- προσπαθώ
- ΣΤΡΟΦΗ
- δύο
- πανεπιστήμιο
- χρήση
- χρησιμοποιώντας
- ποικιλία
- Οχήματα
- μέσω
- Δες
- περπάτημα
- ΛΟΙΠΌΝ
- ήταν
- Ποιό
- Ο ΟΠΟΊΟΣ
- ευρύς
- Ευρύ φάσμα
- με
- χωρίς
- Εργασία
- εργαζόμενος
- θα
- zephyrnet
Περισσότερα από Νανοχόκ

Εξαιρετικά γρήγορος έλεγχος περιστροφών σε μικροσκόπιο
Κόμβος πηγής: 1926614
Σφραγίδα ώρας: 28 Ιανουαρίου 2023

Ενσωμάτωση ρομπότ με βάση το Origami που αισθάνονται, αποφασίζουν και ανταποκρίνονται
Κόμβος πηγής: 2565107
Σφραγίδα ώρας: 4 Απριλίου 2023
Ετεροδομές δύο/οιονεί δύο διαστάσεων με βάση περοβσκίτη: Κατασκευή, ιδιότητες και εφαρμογές
Κόμβος πηγής: 1938788
Σφραγίδα ώρας: 3 Φεβρουαρίου 2023

Αποκαλύφθηκε διαδικασία διάσπασης νερού υψηλής απόδοσης
Κόμβος πηγής: 1949683
Σφραγίδα ώρας: 10 Φεβρουαρίου 2023
Οι ερευνητές περιγράφουν λεπτομέρειες που δεν έχουν ξαναδεί ιδιότητες σε μια οικογένεια υπεραγώγιμων μετάλλων Kagome
Κόμβος πηγής: 1952937
Σφραγίδα ώρας: 11 Φεβρουαρίου 2023
Τα ολοκληρωμένα φωτονικά κυκλώματα θα μπορούσαν να συμβάλουν στο κλείσιμο του «κενού των Τεραχέρτζ»
Κόμβος πηγής: 1899339
Σφραγίδα ώρας: 14 Ιανουαρίου 2023

Οι εκπομπές άνθρακα από τα λιπάσματα θα μπορούσαν να μειωθούν έως και 80% έως το 2050
Κόμβος πηγής: 1951214
Σφραγίδα ώρας: 11 Φεβρουαρίου 2023
Νέα σιδηροηλεκτρικά για πιο αποτελεσματική μικροηλεκτρονική
Κόμβος πηγής: 2716345
Σφραγίδα ώρας: 9 Ιουνίου 2023
Πώς ένας νανοκαταλύτης χαλκού που σπάει ρεκόρ μετατρέπει το CO2 σε υγρά καύσιμα
Κόμβος πηγής: 1961058
Σφραγίδα ώρας: 16 Φεβρουαρίου 2023
Ερευνητές εκτυπώνουν 3D λειτουργικό ανθρώπινο εγκεφαλικό ιστό
Κόμβος πηγής: 3093799
Σφραγίδα ώρας: 2 Φεβρουαρίου 2024
Ανάπτυξη τεχνολογιών για τη μείωση του κόστους παραγωγής πράσινου υδρογόνου
Κόμβος πηγής: 2700260
Σφραγίδα ώρας: 2 Ιουνίου 2023
Ξεκλειδώνοντας τα μυστικά της περιστροφής με ανιχνευτές υψηλής αρμονίας
Κόμβος πηγής: 2969974
Σφραγίδα ώρας: 10 Νοεμβρίου 2023