HELSINKI - Japans SLIM lander nåede sit mål om en nøjagtig månelandende måne med kun en af to hovedpropeller i drift, sagde JAXA torsdag, mens en lille rover returnerede et billede af rumfartøjet.
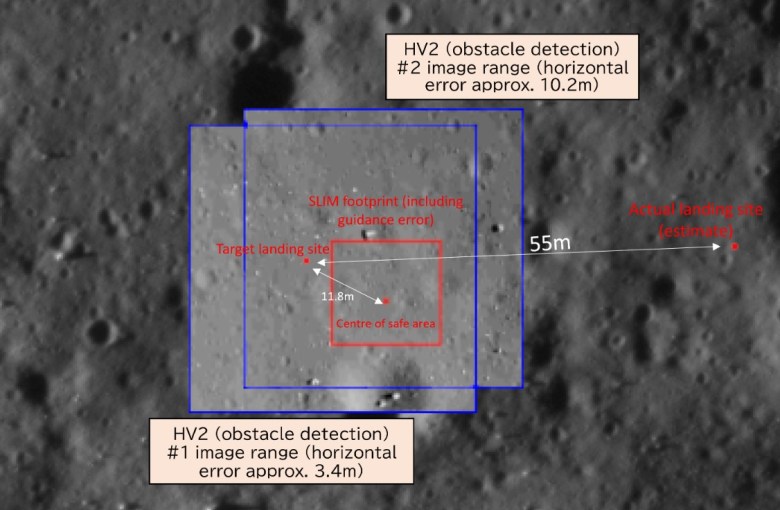
SLIM foretog en præcis landing kl. 25.24889 øst, 13.31549 syd på skråningen af Shioli-krateret, 55 meter fra målpunktet, sagde Shinichiro Sakai, SLIM-team-projektleder hos JAXA, under en pressekonference tidligt torsdag (25. januar) og opfyldte en nøgle missionskriterium.
Agenturet sigtede efter en højpræcisionslanding, defineret som værende inden for 100 meter fra målpunktet.
SLIM gjorde sit historisk månelanding 19. januar, også med succes at slippe et par små rovere ud på overfladen lige før touchdown. Den SLIM-landing gjorde Japan til det femte land, der landede på månen, men problemer med strømproduktion betød, at rumfartøjets aktive tid på overfladen var genvej. Der er dog stadig håb om, at SLIM kan genaktiveres inden udgangen af måneden.
Sakai afslørede dog, at en af de to vigtigste thrustere sandsynligvis fejlede under den sidste landingsfase. Dette foregik fra en højde på 50 meter til landing, hvilket resulterede i utilsigtet sidebevægelse ovenover.
"Under disse omstændigheder identificerer SLIM-softwaren ombord uregelmæssigt uregelmæssigheden, og mens den kontrollerer den vandrette position så meget som muligt, fortsatte SLIM nedstigningen med den anden motor og bevægede sig gradvist mod øst."
SLIM-landingen var beregnet til at ske i to trin. Først med landende thrustere nede, derefter en mindre thruster, der skyder for at vippe rumfartøjet om på siden. SLIM bliver derefter polstret af fem knusbare, 3D-printede aluminiumsgitter-landingsben.
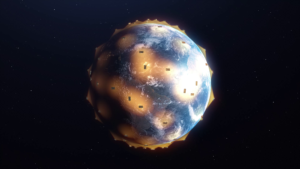
Et billede af SLIM taget af en af roverne, Transformable Lunar Robot LEV-2, afslører, at rumfartøjet er på månens overflade med sin thruster pegende opad. Årsagen til den tilsyneladende motorfejl er ved at blive undersøgt.
Landingsholdningen betød, at SLIMs solpanel vender mod vest, hvilket resulterede i, at det i første omgang ikke modtog sollys. Men JAXA siger, at der er en mulighed for, at solcellerne kan generere elektricitet i løbet af måneaftenen, efterhånden som belysningen forbedres.
"Selvom SLIMs aktiviteter på Månen oprindeligt forventedes kun at vare et par dage, vil de nødvendige forberedelser til genopretning fortsætte for at indhente yderligere tekniske og videnskabelige data," en erklæring læse.
Situationen minder om Philae-landeren som en del af Europas Rosetta-mission. Philae hoppede, da den gjorde sit landingsforsøg på Comet 67P i 2014. Den havde også problemer med belysningen, før den kortvarigt vågnede op igen.
JAXA har tidligere udtalt, at SLIM frakoblede sit batteri med 12 %, som planlagt, for at forhindre overafladning. SLIM slukkede kl. 12 Eastern (57 UTC) 1757. januar, kun to en halv time efter landing kl. 19:10 Eastern (20 UTC).
Multiband spektroskopisk kamera (MBC) monteret på SLIM var i stand til at fungere på prøvebasis og tage billeder, før strømmen blev slukket. JAXA offentliggjort et MBC-billede skabt ved at syntetisere 257 monokrome billeder i lav opløsning. MBC vil blive sat i værk, hvis SLIM kan genaktivere.
"Forberedelser er i gang for omgående at udføre 10-bånds højopløsningsspektroskopiske observationer, når solbelysningstilstanden forbedres, og SLIM genvinder sig af den strøm, der genereres af solpanelet," udtalte JAXA.
Den 2.1 kilo tunge Lunar Excursion Vehicle (LEV-1) lille rover udførte med succes aktiviteter på månens overflade, herunder udførte planlagte springbevægelser. LEV-1 opnåede direkte kommunikation med jordstationer, herunder en inter-robot test radiobølge datatransmission fra LEV-2. Billedopsamling af LEV-1 er ikke blevet bekræftet på nuværende tidspunkt, ifølge JAXA.
LEV-1 er i standbytilstand på månens overflade. "Mens evnen til at genoptage aktiviteten er afhængig af solenergiproduktion fra ændringer i solens retning, vil bestræbelserne blive opretholdt for at fortsætte med at modtage signaler fra LEV-1," sagde JAXA.
Den baseball-størrelse, 0.25 kg LEV-2 rover, med tilnavnet SORA-Q, blev kørt på månens overflade og afbildet SLIM. "Vi er i øjeblikket ved at analysere andre data, herunder kørelogs, og planlægger at offentliggøre resultaterne i fremtiden," bemærkede JAXA i en erklæring på roveren.
LEV-2 er udviklet i fællesskab af JAXA, Tomy, Sony og Doshisha University. Det er den mindste og letteste måne-rover nogensinde, ifølge JAXA.
"LEV-2 "SORA-Q", som blev udviklet ved at kombinere legetøjsteknologi, den nyeste sensorrobotteknologi og JAXA's rumteknologi, og har fremragende autonome betjenings- og bevægelsesegenskaber," sagde Kazuyuki Funaki, direktør for JAXA Space Exploration Innovation Hub.
Solnedgang over Shioli-krateret forventes omkring tidlig UTC 31. januar. Hverken SLIM eller dets rovere bærer radioisotopvarmerenheder. De forventes derfor ikke at overleve månens nattetid, hvor temperaturerne vil falde til omkring minus 130 Celsius.
- SEO Powered Content & PR Distribution. Bliv forstærket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk dig selv. Adgang her.
- PlatoAiStream. Web3 intelligens. Viden forstærket. Adgang her.
- PlatoESG. Kulstof, CleanTech, Energi, Miljø, Solenergi, Affaldshåndtering. Adgang her.
- PlatoHealth. Bioteknologiske og kliniske forsøgs intelligens. Adgang her.
- Kilde: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :har
- :er
- :ikke
- ][s
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- I stand
- over
- Ifølge
- præcis
- opnået
- erhverve
- erhvervede
- erhvervelse
- Handling
- aktiv
- aktiviteter
- aktivitet
- Efter
- agentur
- Rettet
- også
- an
- analysere
- ,
- tilsyneladende
- ER
- omkring
- Array
- AS
- At
- forsøg
- holdning
- autonom
- autonomt
- grundlag
- batteri
- BE
- været
- før
- være
- kortvarigt
- men
- by
- værelse
- CAN
- kapacitet
- fange
- fanget
- bære
- Årsag
- Celler
- Celsius
- Ændringer
- karakteristika
- omstændigheder
- kombinerer
- Kommunikation
- betingelse
- Adfærd
- gennemført
- Konference
- BEKRÆFTET
- fortsæt
- fortsatte
- styring
- land
- oprettet
- For øjeblikket
- polstret
- data
- Dage
- definerede
- udviklet
- direkte
- retning
- Direktør
- afbrudt
- ned
- drevet
- kørsel
- Drop
- i løbet af
- Tidligt
- Øst
- østlige
- indsats
- elektricitet
- ende
- Engine (Motor)
- Europas
- aften
- NOGENSINDE
- fremragende
- henrettet
- eksisterer
- forventet
- udforskning
- vender
- mislykkedes
- få
- femte
- endelige
- fyring
- Fornavn
- fem
- Til
- fra
- opfyldelse
- yderligere
- fremtiden
- generere
- genereret
- generation
- mål
- gradvist
- Ground
- Halvdelen
- høj opløsning
- håber
- Vandret
- HOURS
- Men
- HTML
- HTTPS
- Hub
- identificerer
- if
- billede
- billeder
- forbedrer
- in
- Herunder
- indiske
- i første omgang
- Innovation
- beregnet
- ind
- spørgsmål
- IT
- ITS
- Jan
- Japan
- Japans
- jpg
- lige
- bare en
- Nøgle
- Land
- landing
- Efternavn
- seneste
- ben
- Sandsynlig
- Lunar
- lavet
- Main
- Making
- leder
- max-bredde
- MBC
- betød
- Mission
- monokrom
- Måned
- Moon
- bevægelse
- flyttet
- bevægelser
- meget
- Navigation
- nødvendig
- Ingen
- heller ikke
- bemærkede
- nu
- observationer
- forekomme
- of
- off
- on
- Ombord
- engang
- ONE
- kun
- betjene
- drift
- drift
- ordrer
- oprindeligt
- Andet
- i løbet af
- par
- del
- fase
- Billeder
- Place
- fly
- planlagt
- plato
- Platon Data Intelligence
- PlatoData
- Punkt
- position
- Muligheden
- mulig
- magt
- strøm
- brug
- trykke
- forhindre
- tidligere
- problemer
- projekt
- offentliggøre
- sætte
- Radio
- modtagende
- Genopretter
- opsving
- frigive
- resterne
- minder
- resulterer
- Resultater
- Genoptag
- Revealed
- afslører
- robot
- robotteknik
- rover
- Said
- videnskabelig
- sensor
- side
- signaler
- Situationen
- Slope
- lille
- mindre
- Software
- sol
- Solceller
- Solar Power
- Sony
- Syd
- Space
- rumforskning
- rumfartøjer
- Tilstand
- erklærede
- Stater
- Stationer
- Steps
- Succesfuld
- Sol
- sollys
- overflade
- overlever
- taget
- mål
- hold
- Teknisk
- Teknologier
- prøve
- at
- Fremtiden
- derefter
- Der.
- Disse
- de
- denne
- torsdag
- Dermed
- tid
- tip
- til
- tog
- mod
- legetøj
- retssag
- Drejede
- to
- undervejs
- enheder
- universitet
- opad
- UTC
- køretøj
- var
- Wave
- var
- hvornår
- som
- mens
- vilje
- med
- inden for
- arbejder
- zephyrnet