23. august 2023 (Nanowerk nyheder) Beføjelserne ved kunstig intelligens (AI) og roboteksperimentsystemer er gået sammen i banebrydende proof-of-concept-arbejde ved National Institute for Materials Science (NIMS) i Japan. Forskerne beskriver udviklingen og demonstrationen af deres "closed loop" automatiseringssoftware i tidsskriftet Videnskab og teknologi for avancerede materialer: Metoder ("NIMS-OS: en automatiseringssoftware til at implementere et lukket kredsløb mellem kunstig intelligens og roboteksperimenter inden for materialevidenskab"). "Det overordnede mål med vores arbejde er at tillade, at eksperimenter, der udforsker materialevidenskab, kan designes og derefter fortsætte automatisk uden menneskelig indgriben," siger fysiker og softwareingeniør Ryo Tamura ved NIMS Center for Grundlæggende Materialforskning. AI'en udfører først informationsindsamling og eksperimentelle designopgaver, som normalt udføres af mennesker, og kontrollerer derefter robotsystemerne, der kan udføre de nødvendige fysiske opgaver. Holdet demonstrerede potentialet i deres system ved at bruge det til at identificere elektrolytter, der ville være egnede til at mediere bevægelsen af ioner i lithium-metalbatterier. Softwaren, kaldet NIMS Orchestration System (NIMS-OS), indeholder to grundlæggende typer moduler. Den første bruger AI-algoritmer til at udforske arkiverede data om materialers egenskaber. Den udvælger lovende materialer og foreslår eksperimentelle procedurer, der gør det muligt for dem at opnå et ønsket mål. Den anden type modul genererer de instruktioner, der er nødvendige for at styre et robotsystem, der vil omsætte instruktionerne i praksis.
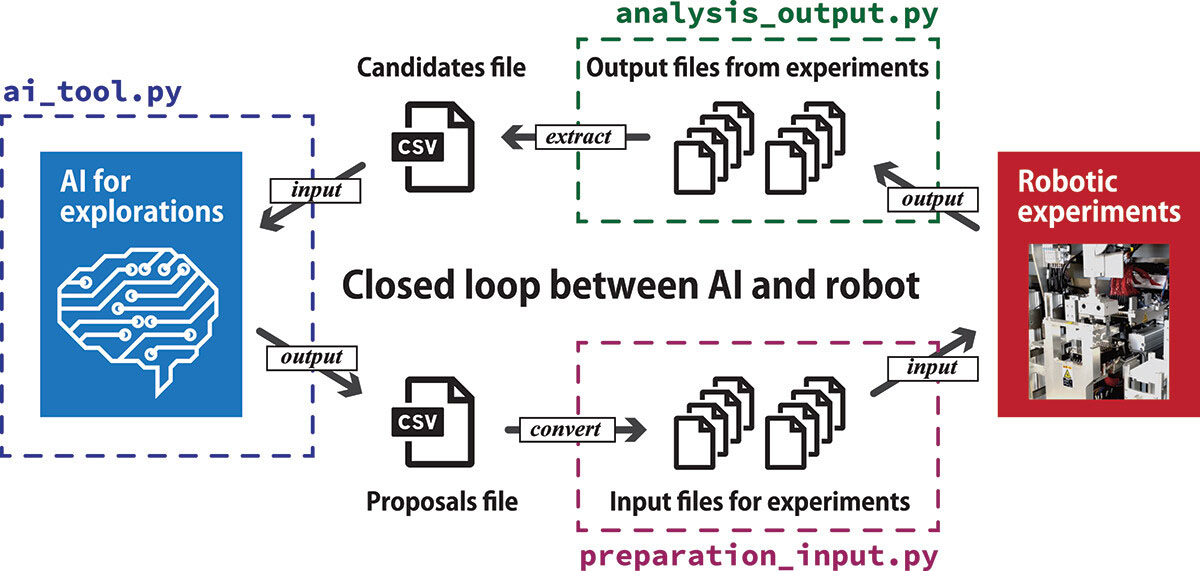 Procedurer i NIMS-OS og roller for hvert Python-script. (Billede: NIMS) For at gøre hele processen så nem at bruge som muligt for en bred vifte af forskere, designede holdet også en letanvendelig grafisk brugergrænseflade til at styre den. "Resultaterne af det indledende arbejde med robotsystemet via NIMS-OS kan tilbageføres for at forfine AI-algoritmerne, der styrer det, gennem flere test- og forbedringscyklusser," siger Tamura. I proof-of-concept-opgaven, der undersøgte muligheder for at fremstille elektrolytter, der maksimerer ydeevnen af en elektrode i et lithium-metalbatteri, brugte NIMS-OS systemer, der blev robotmæssigt samlet til elektrokemiske celler og udsat for opladnings- og afladningscyklusser for at analysere deres ydeevne. Resultaterne identificerede klart den bedre elektrolytsammensætning og indikerede, at der er plads til forbedringer i forhold til de elektrolytter, der i øjeblikket anvendes i vid udstrækning kommercielt. "Vores NIMS-OS er nu offentligt tilgængeligt som open source-software på det meget brugte GitHub-websted," siger Tamura. "Vi planlægger nu at udvikle det yderligere, så det kan arbejde sammen med mange forskellige typer roboteksperimentsystemer."
Procedurer i NIMS-OS og roller for hvert Python-script. (Billede: NIMS) For at gøre hele processen så nem at bruge som muligt for en bred vifte af forskere, designede holdet også en letanvendelig grafisk brugergrænseflade til at styre den. "Resultaterne af det indledende arbejde med robotsystemet via NIMS-OS kan tilbageføres for at forfine AI-algoritmerne, der styrer det, gennem flere test- og forbedringscyklusser," siger Tamura. I proof-of-concept-opgaven, der undersøgte muligheder for at fremstille elektrolytter, der maksimerer ydeevnen af en elektrode i et lithium-metalbatteri, brugte NIMS-OS systemer, der blev robotmæssigt samlet til elektrokemiske celler og udsat for opladnings- og afladningscyklusser for at analysere deres ydeevne. Resultaterne identificerede klart den bedre elektrolytsammensætning og indikerede, at der er plads til forbedringer i forhold til de elektrolytter, der i øjeblikket anvendes i vid udstrækning kommercielt. "Vores NIMS-OS er nu offentligt tilgængeligt som open source-software på det meget brugte GitHub-websted," siger Tamura. "Vi planlægger nu at udvikle det yderligere, så det kan arbejde sammen med mange forskellige typer roboteksperimentsystemer."
Procedurer i NIMS-OS og roller for hvert Python-script. (Billede: NIMS) For at gøre hele processen så nem at bruge som muligt for en bred vifte af forskere, designede holdet også en letanvendelig grafisk brugergrænseflade til at styre den. "Resultaterne af det indledende arbejde med robotsystemet via NIMS-OS kan tilbageføres for at forfine AI-algoritmerne, der styrer det, gennem flere test- og forbedringscyklusser," siger Tamura. I proof-of-concept-opgaven, der undersøgte muligheder for at fremstille elektrolytter, der maksimerer ydeevnen af en elektrode i et lithium-metalbatteri, brugte NIMS-OS systemer, der blev robotmæssigt samlet til elektrokemiske celler og udsat for opladnings- og afladningscyklusser for at analysere deres ydeevne. Resultaterne identificerede klart den bedre elektrolytsammensætning og indikerede, at der er plads til forbedringer i forhold til de elektrolytter, der i øjeblikket anvendes i vid udstrækning kommercielt. "Vores NIMS-OS er nu offentligt tilgængeligt som open source-software på det meget brugte GitHub-websted," siger Tamura. "Vi planlægger nu at udvikle det yderligere, så det kan arbejde sammen med mange forskellige typer roboteksperimentsystemer."
- SEO Powered Content & PR Distribution. Bliv forstærket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk dig selv. Adgang her.
- PlatoAiStream. Web3 intelligens. Viden forstærket. Adgang her.
- PlatoESG. Automotive/elbiler, Kulstof, CleanTech, Energi, Miljø, Solenergi, Affaldshåndtering. Adgang her.
- PlatoHealth. Bioteknologiske og kliniske forsøgs intelligens. Adgang her.
- ChartPrime. Løft dit handelsspil med ChartPrime. Adgang her.
- BlockOffsets. Modernisering af miljømæssig offset-ejerskab. Adgang her.
- Kilde: https://www.nanowerk.com/news2/robotics/newsid=63531.php
- :er
- 10
- 2023
- 23
- 7
- 8
- a
- opnå
- fremskreden
- Avancerede materialer
- AI
- sigte
- algoritmer
- tillade
- også
- an
- analysere
- ,
- ER
- kunstig
- kunstig intelligens
- AS
- samlet
- At
- automatisk
- Automation
- til rådighed
- tilbage
- grundlæggende
- batterier
- batteri
- BE
- Bedre
- mellem
- by
- kaldet
- CAN
- Celler
- center
- opladning
- tydeligt
- lukket
- lukning
- Kom
- kommercielt
- sammensætning
- indeholder
- kontrol
- kontrol
- For øjeblikket
- cykler
- data
- Dato
- demonstreret
- beskrive
- Design
- konstrueret
- ønskes
- udvikle
- Udvikling
- forskellige
- færdig
- hver
- let
- nem at bruge
- elektrolyt
- elektrolytter
- ingeniør
- udføre
- eksperiment
- eksperimenterende
- eksperimenter
- udforske
- udforsket
- Udforskning
- Fed
- Fornavn
- Til
- yderligere
- indsamling
- genererer
- GitHub
- Have
- HTTPS
- menneskelig
- Mennesker
- identificeret
- identificere
- billede
- gennemføre
- in
- angivet
- oplysninger
- initial
- Institut
- anvisninger
- Intelligens
- grænseflade
- indgriben
- ind
- IT
- Japan
- tidsskrift
- jpg
- lave
- Making
- mange
- materialer
- Maksimer
- Mellemøsten
- modul
- Moduler
- bevægelse
- national
- behov
- ingen
- Normalt
- nu
- of
- on
- open source
- Open source software
- Indstillinger
- orkestrering
- vores
- samlet
- ydeevne
- udfører
- PHP
- fysisk
- Banebrydende
- fly
- plato
- Platon Data Intelligence
- PlatoData
- mulig
- potentiale
- beføjelser
- praksis
- procedurer
- Fortsæt
- behandle
- lovende
- egenskaber
- foreslår
- offentligt
- sætte
- Python
- rækkevidde
- raffinere
- påkrævet
- forskning
- forskere
- Resultater
- roller
- Værelse
- siger
- Videnskab
- scripts
- Anden
- flere
- Software
- Software Engineer
- egnede
- systemet
- Systemer
- Opgaver
- opgaver
- hold
- Teknologier
- prøve
- at
- oplysninger
- deres
- Them
- derefter
- Der.
- Gennem
- til
- sammen
- to
- typen
- typer
- brug
- anvendte
- Bruger
- Brugergrænseflade
- bruger
- ved brug af
- udnyttet
- via
- Hjemmeside
- var
- Hele
- bred
- Bred rækkevidde
- bredt
- vilje
- med
- Arbejde
- arbejde sammen
- ville
- zephyrnet
Mere fra Nanoværk
Enkeltkædede polymer-nanopartikler kunne give en lovende tilgang i kampen mod malaria
Kildeknude: 1777884
Tidsstempel: December 19, 2022


Kunstig intelligens katalyserer genaktiveringsforskning og afslører sjældne DNA-sekvenser
Kildeknude: 2665318
Tidsstempel: Maj 19, 2023

Nanorobotic system præsenterer nye muligheder for at målrette svampeinfektioner
Kildeknude: 2680882
Tidsstempel: Maj 26, 2023

Forskere observerer ekstremt sammenpressede retningsbestemte THz-bølger i tynde halvlederkrystaller
Kildeknude: 2634890
Tidsstempel: Maj 4, 2023
Belysning af oprindelsen af den fotovoltaiske effekt i organisk-uorganiske perovskitter
Kildeknude: 3036090
Tidsstempel: December 26, 2023
Forskere beskriver aldrig før sete egenskaber i en familie af superledende Kagome-metaller
Kildeknude: 1952937
Tidsstempel: Februar 11, 2023
Nano-dråber går på ski ved høje temperaturer (m/video)
Kildeknude: 2875099
Tidsstempel: September 11, 2023
Kobberbaserede 2D-katalysatorer omdanner effektivt kuldioxid til metan
Kildeknude: 2899864
Tidsstempel: September 25, 2023