এই সংক্ষিপ্ত পোস্টটি কিছু লেজার স্টেশন বর্ধিতকরণ বর্ণনা করে যা আমরা দূরবর্তীভাবে আমাদের পরীক্ষা চালানোর জন্য তৈরি করেছি।
সেটআপ সমস্যা
আমাদের লেজার ফল্ট ইনজেকশন প্ল্যাটফর্মটি একটি মাইক্রোস্কোপ দিয়ে তৈরি যা একটি লেজারের উত্সকে পরীক্ষার অধীনে একটি ডিভাইসে ফোকাস করতে ব্যবহৃত হয়। লক্ষ্যযুক্ত চিপের অভ্যন্তরীণ আর্কিটেকচার পর্যবেক্ষণ করতে এবং লেজার রশ্মির আকৃতি সামঞ্জস্য করতে এটি একটি ইনফ্রারেড ক্যামেরা দিয়ে সজ্জিত। সৌভাগ্যবশত, এটি একটি মোটর চালিত মঞ্চ দিয়ে সজ্জিত যা আমাদের কাস্টম সফ্টওয়্যার অ্যাপ্লিকেশন থেকে চিপ জুড়ে লেজার রশ্মি সরানোর অনুমতি দেয়। আমরা যে সমস্ত টুল ডেভেলপ করেছি তা লিনাক্স অপারেটিং সিস্টেমে চলে এবং তাই আপনার ভালো ইন্টারনেট সংযোগ থাকলে SSH সংযোগের মাধ্যমে সেগুলি ব্যবহার করা সম্ভব। আমরা মাইক্রোস্কোপ ক্যামেরার লাইভ ইমেজ নিয়ে কিছু লেটেন্সি সমস্যার সম্মুখীন হয়েছিলাম, যেটি আমরা দ্রুত SSH কম্প্রেশন বিকল্প চালু করে সমাধান করেছি (-C) যা ডিফল্টরূপে সক্ষম হয় না এবং প্রয়োজনীয় স্ট্রিমিং ব্যান্ডউইথকে ব্যাপকভাবে হ্রাস করে। তা সত্ত্বেও, সেই সময়ে কিছু উপাদান এখনও পরিস্থিতির হস্তক্ষেপের প্রয়োজন:
- ক্যামেরা আলোর উৎস নিয়ন্ত্রণ করা: একটি ডেডিকেটেড সরঞ্জাম ক্যামেরা ভিজ্যুয়ালাইজেশনের জন্য চিপকে আলোকিত করতে ইনফ্রারেড আলো সরবরাহ করে।
- যান্ত্রিক ক্যামেরার শাটার খোলা বা বন্ধ করা: এই শাটারটি মাইক্রোস্কোপের অংশ এবং লেজার ব্যবহার করার সময় অবশ্যই বন্ধ করতে হবে।
- মাইক্রোস্কোপের উদ্দেশ্য পরিবর্তন করা: 4টি ভিন্ন অপটিক্যাল উদ্দেশ্য একটি যান্ত্রিক ঘূর্ণায়মান বুরুজে মাউন্ট করা হয় এবং বিভিন্ন মাইক্রোস্কোপ ম্যাগনিফিকেশনের অনুমতি দেয়।
আমরা কীভাবে শাটার এবং আলোর উত্সকে দূরবর্তীভাবে নিয়ন্ত্রণ করতে আমাদের পরীক্ষার বেঞ্চকে কাস্টমাইজ করেছি তা নীচে বিশদ রয়েছে৷ বিশেষ করে, আমরা সেই অভিযোজনগুলির খরচ সীমিত করতে চেয়েছিলাম এবং যত তাড়াতাড়ি সম্ভব এটি উপলব্ধ করতে চেয়েছিলাম।
আলোর উৎস নিয়ন্ত্রণ
সেমিকন্ডাক্টরগুলির সিলিকন সাবস্ট্রেট ইনফ্রারেড আলো থেকে আধা-স্বচ্ছ এবং একটি ইনফ্রারেড ক্যামেরার সাহায্যে সার্কিটের অভ্যন্তরীণ কাঠামো পর্যবেক্ষণ করা সম্ভব। পর্যবেক্ষণ সম্ভব করার জন্য, সার্কিটটি একটি ইনফ্রারেড আলোর উত্স দিয়ে আলোকিত করা আবশ্যক। আমাদের লেজার মাইক্রোস্কোপ একটি ডেডিকেটেড আলোর উত্স সরঞ্জাম সহ পাঠানো হয়েছিল, a হায়াশি LA-150CE, যেটিতে একটি পাওয়ার সুইচ এবং আলোর তীব্রতা সামঞ্জস্য করার জন্য একটি নব রয়েছে, যেমনটি নীচে চিত্রিত হয়েছে৷ যখন একটি লেজার পরীক্ষার প্রচারাভিযান শুরু হয়, আমরা সাধারণত আলোর উৎস বন্ধ করে দেই কারণ এটি উপাদানগুলির সাথে হস্তক্ষেপ করতে পারে, বিশেষ করে যখন নমুনাগুলি পাতলা করা হয়।

সরঞ্জামের পিছনের দিকে তাকিয়ে, আমরা একটি "রিমোট" সুইচ এবং একটি বহিরাগত সংযোগকারী উপলব্ধ ছিল। আমরা বুঝতে পেরেছি যে এই আলোর উত্সটি কিছু বিগত সহস্রাব্দ সংযোগকারীর মাধ্যমে দূরবর্তী নিয়ন্ত্রণ ক্ষমতা প্রদান করে। ওয়েবে সামান্য ডকুমেন্টেশন পাওয়া যাবে, কিন্তু আমরা হায়াশি ক্যাটালগে চিহ্নিত করেছি সেখানে একটি আছে ল্যান কন্ট্রোল ইউনিট এই আলোর উত্সের সাথে সামঞ্জস্যপূর্ণ। যাইহোক এই পণ্য বন্ধ করা হয়. এছাড়াও, LAN সংযোগ খুব সুবিধাজনক নয়। একই ক্যাটালগে, আমরা আলোর উৎসের সংযোগকারীর স্পেসিফিকেশন পেয়েছি। যদিও এটি খুব বিস্তারিত নয়, এটি চেষ্টা করার জন্য এটি যথেষ্ট ছিল।
হায়াশি পণ্যের ক্যাটালগ থেকে রিমোট কন্ট্রোল পিনআউট: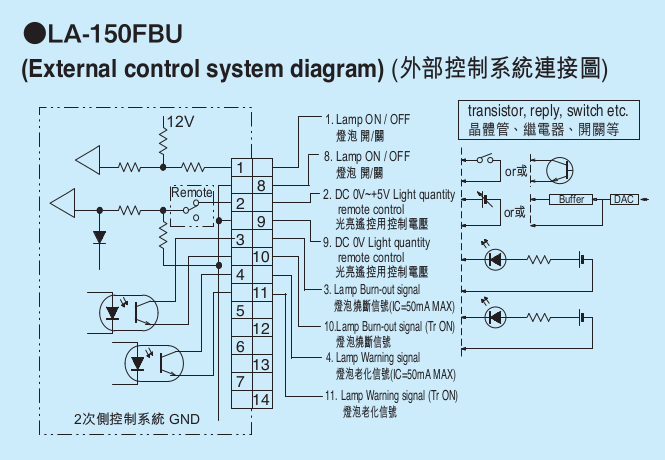
এই ইন্টারফেস দুটি প্রধান আকর্ষণীয় বৈশিষ্ট্য প্রদান করে:
- ডিজিটাল পিন 1 এবং 8 তাদের ছোট করে বা না করে বাতি চালু এবং বন্ধ করতে ব্যবহার করা যেতে পারে। পিন 8 আসলে স্থল, তাই শুধুমাত্র পিন 1 সত্যিই প্রাসঙ্গিক।
- এনালগ পিন 2 0 V (সর্বনিম্ন তীব্রতা) থেকে 5 V (সর্বোচ্চ তীব্রতা) পর্যন্ত একটি সংকেত সহ আলোর তীব্রতা নিয়ন্ত্রণ করে। যখন রিমোট মোড সক্রিয় থাকে, তখন সামনের প্যানেল পটেনটিওমিটারটি বাইপাস হয় এবং আলোর তীব্রতা সরাসরি এই পিন দ্বারা নিয়ন্ত্রিত হয়।
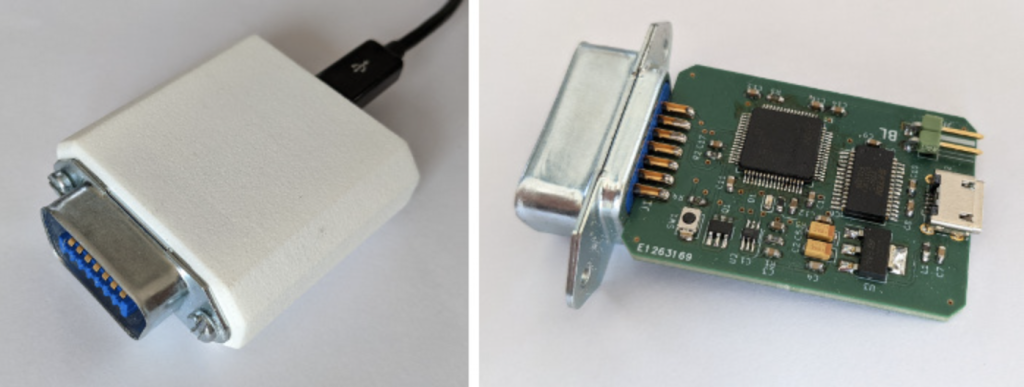
আমরা স্ক্র্যাচ থেকে আমাদের নিজস্ব নির্মাণ করার সিদ্ধান্ত নিয়েছে হায়াশি লাইট রিমোট কন্ট্রোলার নিম্নলিখিত অংশ ব্যবহার করে:
- এমবেডেড অ্যাপ্লিকেশন কোড হোস্ট করার জন্য একটি STM32 মাইক্রোকন্ট্রোলার,
- একটি FT232 ইউএসবি-টু-সিরিয়াল কনভার্টার যা ইউএসবি থেকে ডঙ্গল নিয়ন্ত্রণ করার অনুমতি দেয়,
- আলোর তীব্রতা নিয়ন্ত্রণ করতে 5621 থেকে 0V অ্যানালগ সংকেত প্রজন্মের জন্য একটি AD5B ডিজিটাল-টু-অ্যানালগ কনভার্টার।
আমরা পিসিবি ব্যবহার করে ডিজাইন করেছি KiCad. সত্যি কথা বলতে, এই ডিজাইনটি কিছুটা বড় হতে পারে: মাইক্রোকন্ট্রোলারটি বর্তমান প্রয়োজনের জন্য অনেক বড়, এবং সফ্টওয়্যার ডেভেলপমেন্ট সময়ের খরচে STM232 ডিভাইসের ইতিমধ্যেই USB ক্ষমতা থাকায় FT32 সরিয়ে দেওয়া হতে পারে। আমাদের লক্ষ্য ছিল এটিকে দ্রুত এবং নোংরা করা এবং আমাদের ইতিমধ্যে ডিজাইন করা কিছু স্কিম্যাটিকগুলি পুনরায় ব্যবহার করা।
মজার জন্য, এবং আমরা বিশ্বাস করি যে এটি একটি খুব প্রতিশ্রুতিশীল ভাষা, আমরা মরিচা-এ মাইক্রোকন্ট্রোলার ফার্মওয়্যার তৈরি করেছি।
আমরা অবশেষে ব্যবহার করে একটি সাধারণ প্লাস্টিকের ঘের ডিজাইন করেছি FreeCAD, এবং এটি দিয়ে মুদ্রিত ভাস্কর্য.
অপ্রত্যাশিতভাবে, এই প্রকল্পের সবচেয়ে কঠিন অংশ ছিল সংযোগকারীকে চিহ্নিত করা (পুরুষ পক্ষের জন্য অ্যামফেনল থেকে রেফারেন্স 5710140), এবং এটি ক্রয় করা কারণ এটি অপ্রচলিত এবং অনেক সরবরাহকারীর দ্বারা আর বিক্রি হয় না। অংশ সরবরাহকারী সার্চ ইঞ্জিন অক্টোপার্ট সাহায্য করতে পারি.
সমস্ত স্কিম্যাটিক্স এবং ডিজাইন ফাইল আমাদের পাওয়া যায় GitHub সংগ্রহস্থল.
ক্যামেরার শাটার নিয়ন্ত্রণ করা
মাইক্রোস্কোপে, লেজার রশ্মি এবং ক্যামেরা একই অপটিক্যাল পথ ভাগ করে। যখন লেজারের শুটিং হয়, আলোর একটি ভগ্নাংশ সিলিকন দ্বারা প্রতিফলিত হয় এবং ক্যামেরায় আঘাত করবে। সেন্সরের ক্ষতি রোধ করতে যা দীর্ঘমেয়াদে মৃত পিক্সেলে পরিণত হতে পারে, ক্যামেরার সামনে একটি অপটিক্যাল যান্ত্রিক শাটার বন্ধ করা যেতে পারে। শাটারটি ম্যানুয়াল এবং কার্যকর করার জন্য সামান্য থেকে কোন শক্তির প্রয়োজন হয় না।
রিমোট কন্ট্রোল সম্ভব করার জন্য, আমরা একটি ছোট স্টেপার মোটর কিনেছি এবং একটি পোলুলু থেকে TIC T834 স্টেপার মোটর কন্ট্রোলার. আমরা মোটর দিয়ে শাটার সরানোর জন্য 3D গিয়ার এবং মাইক্রোস্কোপে মাউন্ট করার জন্য একটি বডি তৈরি এবং প্রিন্ট করেছি।
TIC T834-এর মোটরকে শক্তি সরবরাহ করার জন্য একটি শক্তির উৎসের প্রয়োজন, কিন্তু আমাদের মোটর যেহেতু অনেক বেশি কারেন্ট টানে না, তাই আমরা মোটরটিকে পাওয়ার জন্য T834-এর USB পাওয়ার সাপ্লাই ছোট করে দিয়েছি। TIC কন্ট্রোলারগুলি সেটআপ এবং ব্যবহার করা খুব সহজ, এটি ভালভাবে নথিভুক্ত এবং আমাদের সফ্টওয়্যার সরঞ্জামগুলি থেকে মোটর নিয়ন্ত্রণ করতে আমাদের খুব কম সময় লেগেছে। আমরা পাইথনে একটি ক্ষুদ্র নিয়ামক শ্রেণী তৈরি করেছি যা এখন আমাদের সাথে একত্রিত হয়েছে pystages গ্রন্থাগার।
স্টিপার মোটর কন্ট্রোলারদের বর্তমান মোটর অবস্থান খুঁজে বের করতে হবে যখন এটি চালিত হয়। এটি একটি প্রারম্ভিক পদ্ধতির মাধ্যমে করা হয় যেখানে মোটরটি ঘুরতে থাকবে যতক্ষণ না একটি যোগাযোগ সুইচ কন্ট্রোলারকে বলে যে মোটরটি শূন্য অবস্থানে রয়েছে। আমরা T834 এর সাথে সরাসরি সংযুক্ত একটি সাধারণ সুইচ ব্যবহার করেছি যাতে এই বৈশিষ্ট্যটি অন্তর্নির্মিত রয়েছে।
আমরা মুদ্রিত 3D বডি পার্ট খুব সঠিক ছিল না এবং দুটি গিয়ার প্রথমবার সঠিকভাবে কাজ করছিল না। তাপ ব্যবহার করে আমরা গিয়ারের মধ্যে ফাঁক সংশোধন করতে প্লাস্টিকের অংশটিকে সামান্য বাঁকতে পারি। কিছু সমন্বয় করার পরে, আমরা দূরবর্তীভাবে ক্যামেরা শাটারটি পুরোপুরি খুলতে এবং বন্ধ করতে সক্ষম হয়েছি!
যান্ত্রিক নকশা আমাদের পাওয়া যায় GitHub সংগ্রহস্থল.
সর্বশেষ ভাবনা
আলোর উত্স এবং ক্যামেরা শাটারের নিয়ন্ত্রণকে একীভূত করা আমাদের দূরবর্তীভাবে অনেক লেজার পরীক্ষার প্রচার চালানোর অনুমতি দিয়েছে। এটি আগের তুলনায় আরও সুবিধাজনক, কারণ শাটার বন্ধ করা এবং আলো বন্ধ করা এখন লেজার চালু হলে স্বয়ংক্রিয়ভাবে করা যেতে পারে, যেখানে এটি আগে মানুষের শারীরিক হস্তক্ষেপের প্রয়োজন ছিল এবং সহজেই ভুলে যাওয়া যেতে পারে।
উদ্দেশ্য বুরুজ নিয়ন্ত্রণের বিষয়ে, ইতিমধ্যেই মোটর চালিত টারেট বিদ্যমান, কিন্তু দুর্ভাগ্যবশত সেগুলি বেশ ব্যয়বহুল, এবং এটি প্রতিস্থাপন করা কঠিন হতে পারে। এই মুহুর্তের জন্য, আমরা কোন সহজ এবং কম খরচে সমাধান খুঁজে পাইনি। একটি বাহ্যিক মোটর দিয়ে বুরুজ ঘোরানো কঠিন, বিশেষত কারণ সেখানে একটি স্প্রিং আছে যা বুরুজটিকে লক করে দেয় যখন উদ্দেশ্যটি মাইক্রোস্কোপের সাথে সংযুক্ত থাকে। এছাড়াও, মোটর চালিত পর্যায়ে আমরা যে ওজন যোগ করতে পারি তা সীমিত। এই মুহুর্তে এটি এখনও একটি উন্মুক্ত সমস্যা, তবে এটি দূরবর্তীভাবে কাজ করতে বাধা দেয় না, আমরা শুধুমাত্র একটি নির্বাচিত বিবর্ধনের মধ্যে সীমাবদ্ধ।
অবশেষে, নমুনাটি ভাঙ্গা হয়ে গেলে প্রতিস্থাপনের জন্য এখনও ল্যাবে অ্যাক্সেসের প্রয়োজন। ভাগ্যক্রমে, এটা খুব প্রায়ই ঘটবে না। আমরা অবশেষে একটি একক কন্যাবোর্ডে অনেকগুলি সার্কিট মাল্টিপ্লেক্স করতে পারি, তাই আমরা শারীরিক প্রতিস্থাপনের প্রয়োজনের আগে কয়েকটি ডিভাইস বার্ন করতে পারি, তবুও আমরা এমন একটি সমাধান বিকাশ করিনি।

- এসইও চালিত বিষয়বস্তু এবং পিআর বিতরণ। আজই পরিবর্ধিত পান।
- প্লেটোএআইস্ট্রিম। Web3 ডেটা ইন্টেলিজেন্স। জ্ঞান প্রসারিত. এখানে প্রবেশ করুন.
- অ্যাড্রিয়েন অ্যাশলির সাথে ভবিষ্যত মিন্টিং। এখানে প্রবেশ করুন.
- PREIPO® এর সাথে PRE-IPO কোম্পানিতে শেয়ার কিনুন এবং বিক্রি করুন। এখানে প্রবেশ করুন.
- উত্স: https://www.ledger.com/blog/laser-improvements
- : আছে
- : হয়
- :না
- :কোথায়
- 1
- 14
- 24
- 3d
- 8
- a
- সক্ষম
- প্রবেশ
- সঠিক
- দিয়ে
- প্রকৃতপক্ষে
- অভিযোজনের
- যোগ
- সমন্বয়
- পর
- প্রান্তিককৃত
- সব
- অনুমতি
- অনুমতি
- ইতিমধ্যে
- এছাড়াও
- an
- এবং
- কোন
- আর
- আবেদন
- স্থাপত্য
- রয়েছি
- AS
- At
- স্বয়ংক্রিয়ভাবে
- সহজলভ্য
- ব্যান্ডউইথ
- BE
- মরীচি
- কারণ
- আগে
- বিশ্বাস করা
- নিচে
- মধ্যে
- বিশাল
- বিট
- শরীর
- কেনা
- ভাঙা
- নির্মাণ করা
- বিল্ট-ইন
- পোড়া
- কিন্তু
- by
- ক্যামেরা
- ক্যাম্পেইন
- প্রচারাভিযান
- CAN
- ক্ষমতা
- তালিকা
- চিপ
- শ্রেণী
- ঘনিষ্ঠ
- বন্ধ
- বন্ধ
- কোড
- উপযুক্ত
- উপাদান
- সংযুক্ত
- সংযোগ
- কানেক্টিভিটি
- যোগাযোগ
- নিয়ন্ত্রণ
- নিয়ন্ত্রিত
- নিয়ামক
- নিয়ামক
- নিয়ন্ত্রণগুলি
- সুবিধাজনক
- ঠিক
- মূল্য
- পারা
- বর্তমান
- প্রথা
- কাস্টমাইজড
- মৃত
- ডিলিং
- সিদ্ধান্ত নিয়েছে
- নিবেদিত
- ডিফল্ট
- নকশা
- পরিকল্পিত
- বিশদ
- বিকাশ
- উন্নত
- উন্নয়ন
- যন্ত্র
- ডিভাইস
- DID
- বিভিন্ন
- কঠিন
- সরাসরি
- ডকুমেন্টেশন
- না
- সম্পন্ন
- নিচে
- আঁকা
- সময়
- সহজে
- সহজ
- উপাদান
- এম্বেড করা
- সক্ষম করা
- শক্তি
- উন্নত বৈশিষ্ট্য
- যথেষ্ট
- উপকরণ
- সজ্জিত
- বিশেষত
- অবশেষে
- থাকা
- বিদ্যমান
- ব্যয়বহুল
- পরীক্ষা-নিরীক্ষা
- বহিরাগত
- মুখোমুখি
- ফল্ট
- বৈশিষ্ট্য
- বৈশিষ্ট্য
- কয়েক
- নথি পত্র
- পরিশেষে
- আবিষ্কার
- প্রথম
- প্রথমবার
- কেন্দ্রবিন্দু
- অনুসরণ
- জন্য
- বল
- বিস্মৃত
- ভাগ্যক্রমে
- পাওয়া
- ভগ্নাংশ
- থেকে
- সদর
- মজা
- ফাঁক
- প্রজন্ম
- লক্ষ্য
- ভাল
- অতিশয়
- স্থল
- ঘটা
- কঠিন
- আছে
- সাহায্য
- আঘাত
- নিমন্ত্রণকর্তা
- কিভাবে
- যাহোক
- HTTPS দ্বারা
- মানবীয়
- চিহ্নিত
- চিহ্নিতকরণের
- ভাবমূর্তি
- in
- সংহত
- মজাদার
- ইন্টারফেস
- হস্তক্ষেপ
- অভ্যন্তরীণ
- Internet
- ইন্টারনেট সংযোগ
- হস্তক্ষেপ
- সমস্যা
- সমস্যা
- IT
- মাত্র
- গবেষণাগার
- ভাষা
- লেজার
- অদৃশ্যতা
- বিলম্ব সমস্যা
- খতিয়ান
- লাইব্রেরি
- আলো
- LIMIT টি
- সীমিত
- লিনাক্স
- সামান্য
- জীবিত
- লক্স
- দীর্ঘ
- অনেক
- কম খরচে
- প্রণীত
- প্রধান
- করা
- মেকিং
- ম্যানুয়াল
- অনেক
- সর্বোচ্চ প্রস্থ
- সর্বাধিক
- মে..
- যান্ত্রিক
- অণুবীক্ষণ
- সহস্র বত্সর
- সর্বনিম্ন
- মোড
- মুহূর্ত
- অধিক
- সেতু
- মোটর
- পদক্ষেপ
- চলন্ত
- অবশ্যই
- প্রয়োজন
- প্রয়োজন
- না।
- এখন
- উদ্দেশ্য
- উদ্দেশ্য
- মান্য করা
- অপ্রচলিত
- of
- বন্ধ
- অফার
- প্রায়ই
- on
- কেবল
- খোলা
- অপারেটিং
- অপারেটিং সিস্টেম
- পছন্দ
- or
- ক্রম
- আমাদের
- বাইরে
- পৃথিবীব্যাপি
- প্যানেল
- অংশ
- বিশেষ
- যন্ত্রাংশ
- গত
- পথ
- শারীরিক
- পিনের
- জায়গা
- প্লাস্টিক
- মাচা
- Plato
- প্লেটো ডেটা ইন্টেলিজেন্স
- প্লেটোডাটা
- অবস্থান
- সম্ভব
- পোস্ট
- ক্ষমতা
- পাওয়ার সাপ্লাই
- চালিত
- প্রতিরোধ
- পণ্য
- পণ্য
- প্রকল্প
- আশাপ্রদ
- প্রদান
- প্রদত্ত
- উপলব্ধ
- ক্রয়
- পাইথন
- দ্রুত
- দ্রুত
- রেঞ্জিং
- সত্যিই
- হ্রাস
- প্রতিফলিত
- প্রাসঙ্গিক
- দূরবর্তী
- অপসারিত
- প্রতিস্থাপন করা
- প্রতিস্থাপন
- প্রয়োজনীয়
- প্রয়োজন
- ফল
- পুনঃব্যবহারের
- চালান
- জং
- একই
- সার্চ
- নির্বাচিত
- সেমি কন্ডাক্টর
- সেটআপ
- আকৃতি
- শেয়ার
- জাহাজে
- শুটিং
- সংক্ষিপ্ত
- shorted
- shorting
- পাশ
- সংকেত
- সিলিকোন
- সহজ
- থেকে
- একক
- ছোট
- So
- সফটওয়্যার
- সফটওয়্যার উন্নয়ন
- বিক্রীত
- সমাধান
- কিছু
- শীঘ্রই
- উৎস
- সবিস্তার বিবরণী
- ঘূর্ণন
- বসন্ত
- পর্যায়
- শুরু
- স্টেশন
- এখনো
- এসটিএম 32
- স্ট্রিমিং
- গঠন
- এমন
- সরবরাহকারীদের
- সরবরাহ
- সুইচ
- পদ্ধতি
- লক্ষ্যবস্তু
- বলে
- পরীক্ষা
- পরীক্ষামূলক
- চেয়ে
- যে
- সার্জারির
- তাহাদিগকে
- সেখানে।
- অতএব
- তারা
- এই
- সেগুলো
- যদিও?
- দ্বারা
- সময়
- থেকে
- অত্যধিক
- গ্রহণ
- সরঞ্জাম
- চেষ্টা
- পরিণত
- বাঁক
- দুই
- অধীনে
- বোঝা
- দুর্ভাগ্যবশত
- পর্যন্ত
- us
- ইউএসবি
- ব্যবহার
- ব্যবহৃত
- ব্যবহার
- সাধারণত
- খুব
- কল্পনা
- চেয়েছিলেন
- ছিল
- we
- ওয়েব
- ওজন
- আমরা একটি
- ছিল
- কখন
- যে
- ইচ্ছা
- সঙ্গে
- কাজ
- দূর থেকে কাজ
- এখনো
- আপনি
- zephyrnet
- শূন্য