মেটা কোয়েস্ট হেডসেটগুলি চলন্ত যানবাহনে কাজ করার জন্য কাজ করছে।
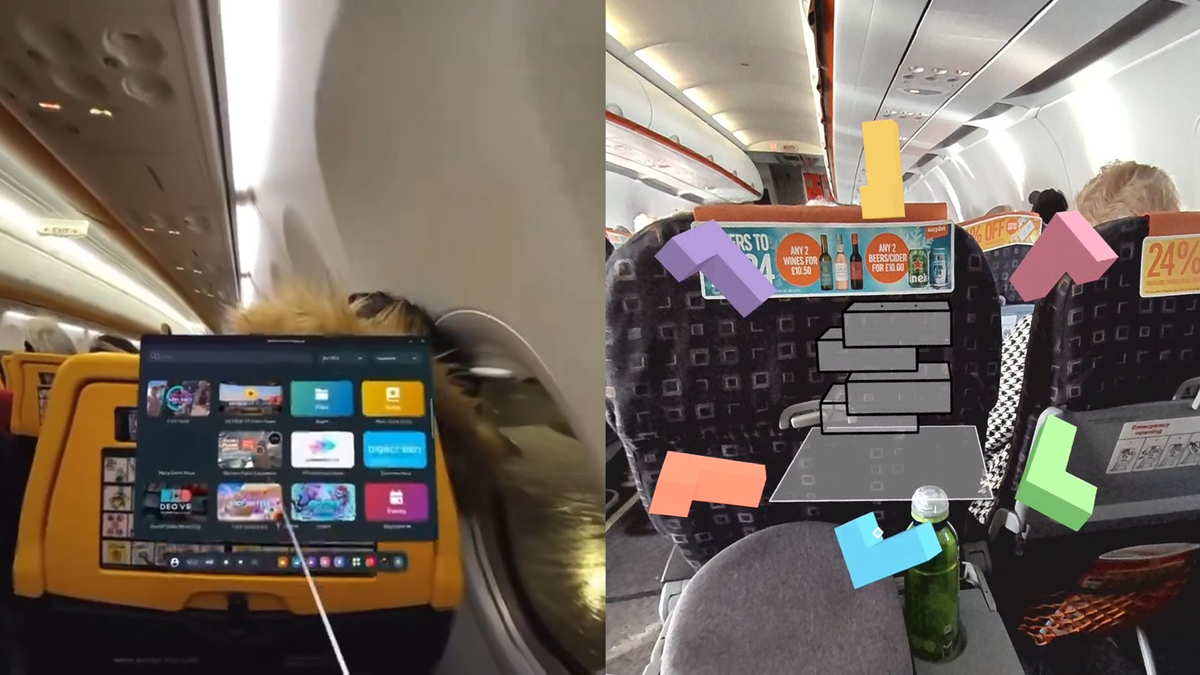
ইউএক্স ডিজাইনার অ্যান্ড্রু ফক্স একটি ভিডিও পুনরায় পোস্ট করেছেন৷ এক্স পর্যন্ত ফেসবুক ব্যবহারকারী Netsvietaiev Oleksandr চেষ্টা একটি বিমানে পাসথ্রু মোডে কোয়েস্ট 3 ব্যবহার করতে, কিন্তু ইন্টারফেসটি দূরে সরে যাওয়ার কারণে তা করতে অক্ষম।
মেটার সিটিও অ্যান্ড্রু বসওয়ার্থ বললেন কেন এটি ঘটছে তা সংক্ষিপ্ত করার জন্য পোস্টে, এবং মেটা "এটি নিয়ে কাজ করছে" বলে শেষ করে৷
না, আমরা আপনার হেডসেট গতির সাপেক্ষে বস্তুগুলিকে স্থানীয়করণ করতে একটি IMU ব্যবহার করি যাতে চলমান যানবাহনগুলি একটি চ্যালেঞ্জের প্রতিনিধিত্ব করে (যখন তারা যে কোনও দিকে ত্বরান্বিত হয়)। আমরা ক্যামেরাগুলিও ব্যবহার করি, অবশ্যই, তারা একসাথে কাজ করে কারণ IMU উচ্চতর ফ্রিকোয়েন্সি কিন্তু কম নির্ভুলতা। চেষ্টা করছি!
- বোজ (@ বোজট্যাঙ্ক) জানুয়ারী 24, 2024
তাহলে চলন্ত যানবাহনে এই ড্রিফিং আসলে কেন ঘটে?
লোকেরা প্রায়শই মনে করে যে হেডসেট, চশমা এবং স্ব-ট্র্যাকিং কন্ট্রোলারগুলিতে মার্কারলেস ইনসাইড-আউট ট্র্যাকিং সিস্টেমগুলি কেবল ক্যামেরা ব্যবহার করে, তবে এটি এমন নয়। এই সিস্টেমগুলি জড়তা পরিমাপ ইউনিট (IMU) এর উপর ঠিক ততটাই নির্ভর করে, একটি চিপ যাতে একটি ছোট অ্যাক্সিলোমিটার এবং জাইরোস্কোপ থাকে।
ক্যামেরাগুলি সাধারণত 30Hz বা 60Hz এ চলে, IMU সাধারণত 1000Hz এর কাছাকাছি আপডেট প্রদান করে, যা অনেক কম লেটেন্সি সক্ষম করে। যাইহোক, একটি IMU আসলে পরম আন্দোলন সনাক্ত করতে পারে না - অন্তত সরাসরি নয়। আইএমইউ-এর অ্যাক্সিলেরোমিটার যদিও অভিকর্ষের সাপেক্ষে ত্বরণ অনুধাবন করে, এবং আপনি বেগ পেতে সময়ের সাথে সাথে ত্বরণের অবিচ্ছেদ্য অংশ নিতে পারেন। এবং যদি আপনি সময়ের সাথে সাথে সেই বেগের মানগুলির অবিচ্ছেদ্য গ্রহণ করেন তবে আপনি মূল অবস্থান থেকে স্থানচ্যুতি পাবেন।
এই প্রক্রিয়াটিকে ডেড রেকনিং বলা হয়। প্রতি মুহুর্তে, প্রতিটি হেডসেট এবং কন্ট্রোলার কীভাবে নিজেকে ট্র্যাক করে, এবং ক্যামেরা বা লেজার বেস স্টেশনগুলির মতো অপটিক্যাল উপাদানগুলি শুধুমাত্র IMU ডেটার কোলাহল দ্বারা সৃষ্ট ক্রমবর্ধমান ত্রুটি সংশোধন করতে ব্যবহৃত হয়৷ কিন্তু একটি চলন্ত যান যেমন একটি বিমানে, অ্যাক্সিলেরোমিটারটি গাড়ির ত্বরণ নিজেই তুলে নেবে, এটি হেডসেট ত্বরণ বলে মনে করে, যার ফলস্বরূপ আপনি উপরের ফক্সের ভিডিওতে দেখতে পাচ্ছেন যে হঠাৎ এবং দ্রুত অবস্থানগত প্রবাহ।
অ্যাপল ভিশন প্রো এর একটি ট্র্যাভেল মোড রয়েছে, তবে এটি ঠিক কী করে তা স্পষ্ট নয়।
মেটা সমস্যাটি "কাজ করছে" বলে বসওয়ার্থের অর্থ কী তা স্পষ্ট নয়।
বর্তমানে কোয়েস্টে 6DoF অবস্থানগত ট্র্যাকিং অক্ষম করা সম্ভব, এবং হেডসেটটি 3DoF ঘূর্ণন-শুধুমাত্র ট্র্যাকিং-এ ফিরে আসবে, তবে এটি পাসথ্রুও অক্ষম করে। তাই মেটা সম্ভবত যখন অবস্থানগত ট্র্যাকিং অক্ষম করা হয় তখন পাসথ্রু অনুমতি দেওয়ার পরিকল্পনা করতে পারে।
বিকল্পভাবে, মেটা হয়তো কোনোভাবে চলমান যানবাহনে অবস্থানগত ট্র্যাকিং কাজ করতে কাজ করছে, সম্ভবত সিস্টেমকে সম্পূর্ণরূপে ক্যামেরা ভিজ্যুয়ালের উপর নির্ভর করার নির্দেশ দিয়ে এবং IMU উপেক্ষা করে। গত বছর মেটা একটি গবেষণা প্রকল্প প্রদর্শন করেছে একটি চলমান BMW-তে একটি কোয়েস্ট প্রো কাজ করা, কিন্তু এটি গাড়ির নিজস্ব অনবোর্ড আইএমইউ-এর সাথে ইন্টারফেস করার সাথে জড়িত।
এদিকে, অ্যাপল ভিশন প্রো এর বিমানে ব্যবহারের জন্য ট্র্যাভেল মোড রয়েছে এবং অ্যাপল এই ব্যবহারের ক্ষেত্রে বাজারজাত করেছে, তবে অ্যাপলের ট্র্যাভেল মোড ঠিক কী করে তা বর্তমানে অজানা। অ্যাপল কেবল বলেছে যে এটি "ভিজ্যুয়ালগুলিকে স্থিতিশীল করবে"। আমি নিউ ইয়র্কে ভিশন প্রো বাছাই করার পরে আমার বাড়ি যাত্রার সময় এই বৈশিষ্ট্যটি পরীক্ষা করার পরিকল্পনা করছি।
- এসইও চালিত বিষয়বস্তু এবং পিআর বিতরণ। আজই পরিবর্ধিত পান।
- PlatoData.Network উল্লম্ব জেনারেটিভ Ai. নিজেকে ক্ষমতায়িত করুন। এখানে প্রবেশ করুন.
- প্লেটোএআইস্ট্রিম। Web3 ইন্টেলিজেন্স। জ্ঞান প্রসারিত. এখানে প্রবেশ করুন.
- প্লেটোইএসজি। কার্বন, ক্লিনটেক, শক্তি, পরিবেশ সৌর, বর্জ্য ব্যবস্থাপনা. এখানে প্রবেশ করুন.
- প্লেটো হেলথ। বায়োটেক এবং ক্লিনিক্যাল ট্রায়াল ইন্টেলিজেন্স। এখানে প্রবেশ করুন.
- উত্স: https://www.uploadvr.com/meta-working-on-quest-3-moving-vehicle-airplane-support/
- : আছে
- : হয়
- :না
- $ ইউপি
- 1
- 24
- 9
- a
- উপরে
- পরম
- দ্রুততর করা
- ত্বরণ
- সঠিকতা
- প্রকৃতপক্ষে
- পর
- বিমান
- এ্যারোপ্লেনের
- অনুমতি
- এছাড়াও
- an
- এবং
- অ্যান্ড্রু
- কোন
- আপেল
- রয়েছি
- কাছাকাছি
- AS
- At
- দূরে
- পিছনে
- ভিত্তি
- BE
- কারণ
- হচ্ছে
- বগুড়া
- কিন্তু
- by
- নামক
- ক্যামেরা
- ক্যামেরা
- CAN
- গাড়ী
- কেস
- ঘটিত
- চ্যালেঞ্জ
- চিপ
- এর COM
- উপাদান
- ধারণ
- নিয়ামক
- ঠিক
- পারা
- পথ
- CTO
- এখন
- উপাত্ত
- মৃত
- ডিজাইনার
- সনাক্ত
- অভিমুখ
- সরাসরি
- অক্ষম
- উত্পাটন
- না
- পারেন
- সক্রিয়
- সম্পূর্ণরূপে
- ভুল
- প্রতি
- ঠিক
- ফেসবুক
- পতন
- বৈশিষ্ট্য
- জন্য
- শিয়াল
- ফ্রিকোয়েন্সি
- থেকে
- পাওয়া
- চশমা
- মাধ্যাকর্ষণ
- ঘটা
- ঘটনা
- হেডসেট
- হেডসেট
- ঊর্ধ্বতন
- হোম
- কিভাবে
- যাহোক
- HTTPS দ্বারা
- i
- if
- IMU
- in
- অখণ্ড
- ইন্টারফেস
- জড়িত
- আইএসএন
- IT
- নিজেই
- যাত্রা
- JPG
- মাত্র
- রাখা
- লেজার
- গত
- গত বছর
- অদৃশ্যতা
- অন্তত
- মত
- নিম্ন
- করা
- মেকিং
- মানে
- মাপা
- মেটা
- হতে পারে
- মোড
- মুহূর্ত
- গতি
- আন্দোলন
- চলন্ত
- অনেক
- my
- নতুন
- নিউ ইয়র্ক
- বস্তু
- of
- প্রায়ই
- on
- অনবোর্ড
- কেবল
- or
- মূল
- শেষ
- নিজের
- পাসথ্রু
- সম্ভবত
- বাছাই
- অবচয়
- পরিকল্পনা
- বিমান
- পরিকল্পনা
- Plato
- প্লেটো ডেটা ইন্টেলিজেন্স
- প্লেটোডাটা
- অবস্থান
- সম্ভব
- পোস্ট
- জন্য
- সমস্যা
- প্রক্রিয়া
- উপলব্ধ
- খোঁজা
- অনুসন্ধান 3
- অনুসন্ধান প্রো
- দ্রুত
- উপর
- নির্ভর করা
- চিত্রিত করা
- গবেষণা
- ফলাফল
- চালান
- s
- বলেছেন
- উক্তি
- দেখ
- So
- একরকম
- স্থির রাখা
- স্টেশন
- এমন
- আকস্মিক
- সংক্ষিপ্ত করা
- পদ্ধতি
- সিস্টেম
- T
- গ্রহণ করা
- পরীক্ষা
- যে
- সার্জারির
- তারপর
- এইগুলো
- তারা
- মনে
- চিন্তা
- এই
- সেগুলো
- যদিও?
- সময়
- থেকে
- একসঙ্গে
- অনুসরণকরণ
- ট্র্যাক
- ভ্রমণ
- সাধারণত
- অক্ষম
- অস্পষ্ট
- একক
- অজানা
- আপডেট
- UploadVR
- ব্যবহার
- ব্যবহার ক্ষেত্রে
- ব্যবহৃত
- ব্যবহারকারী
- মানগুলি
- বাহন
- যানবাহন
- ভেলোসিটি
- ভিডিও
- দৃষ্টি
- ভিজ্যুয়াল
- ছিল
- we
- কি
- কখন
- যে
- কেন
- ইচ্ছা
- সঙ্গে
- হয়া যাই ?
- এক সাথে কাজ কর
- কাজ
- বছর
- ইয়র্ক
- আপনি
- আপনার
- zephyrnet









