29 مايو 2023 (أخبار Nanowerk) اخترع باحثون من قسم العلوم الميكانيكية والهندسة الحيوية بجامعة أوساكا نوعًا جديدًا من الروبوتات المشيية التي تستفيد من عدم الاستقرار الديناميكي للتنقل. ومن خلال تغيير مرونة أدوات التوصيل، يمكن جعل الروبوت يدور دون الحاجة إلى أنظمة تحكم حسابية معقدة. قد يساعد هذا العمل في إنشاء روبوتات إنقاذ قادرة على اجتياز التضاريس غير المستوية. لقد طورت معظم الحيوانات على وجه الأرض نظامًا قويًا للحركة باستخدام الأرجل التي توفر لها درجة عالية من الحركة في نطاق واسع من البيئات. ومن المخيب للآمال إلى حد ما أن المهندسين الذين حاولوا تكرار هذا النهج وجدوا في كثير من الأحيان أن الروبوتات ذات الأرجل هشة بشكل مدهش. يمكن أن يؤدي انهيار ساق واحدة بسبب الإجهاد المتكرر إلى الحد بشدة من قدرة هذه الروبوتات على العمل. بالإضافة إلى ذلك، فإن التحكم في عدد كبير من المفاصل حتى يتمكن الروبوت من عبور البيئات المعقدة يتطلب الكثير من قوة الكمبيوتر. ستكون التحسينات في هذا التصميم مفيدة للغاية لبناء روبوتات مستقلة أو شبه مستقلة يمكنها العمل كمركبات استكشاف أو إنقاذ ودخول المناطق الخطرة.
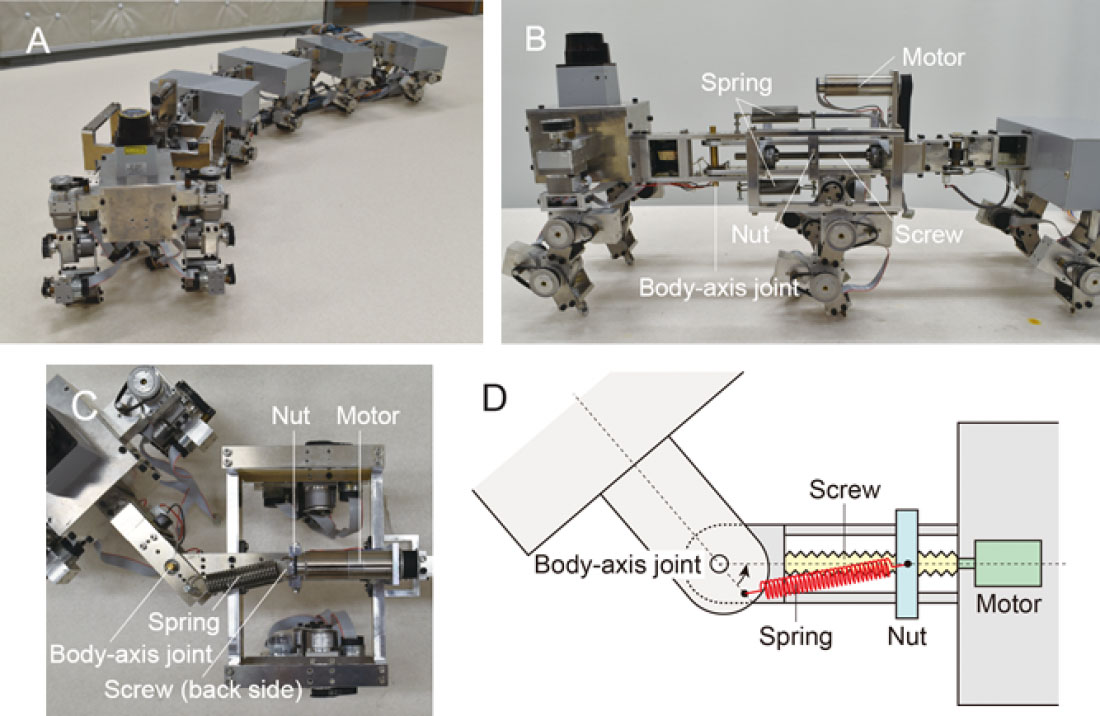 روبوت Myriapod (A) وآلية مرونة محور الجسم المتغير (B. منظر أمامي، C. منظر علوي، D. مخططات منظر علوي). (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) الآن، قام باحثون من جامعة أوساكا بتطوير روبوت "myriapod" المحاكاة الحيوية الذي يستفيد من عدم الاستقرار الطبيعي الذي يمكنه تحويل المشي المستقيم إلى حركة منحنية. وفي دراسة نشرت مؤخرا في روبوتات لينة (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)، يصف باحثون من جامعة أوساكا الروبوت الخاص بهم، والذي يتكون من ستة أجزاء (مع ساقين متصلتين بكل قطعة) ومفاصل مرنة. باستخدام برغي قابل للتعديل، يمكن تعديل مرونة الوصلات باستخدام المحركات أثناء حركة المشي. وأظهر الباحثون أن زيادة مرونة المفاصل أدت إلى حالة تسمى "تشعب المذراة"، حيث يصبح المشي المستقيم غير مستقر. وبدلاً من ذلك، ينتقل الروبوت إلى المشي بنمط منحني، إما إلى اليمين أو إلى اليسار. عادة، يحاول المهندسون تجنب خلق حالات عدم الاستقرار. ومع ذلك، فإن الاستخدام المتحكم لها يمكن أن يتيح القدرة على المناورة بكفاءة. يقول شينيا أوي، مؤلف الدراسة: "لقد استلهمنا من قدرة بعض الحشرات شديدة الحركة التي تسمح لها بالتحكم في عدم الاستقرار الديناميكي في حركتها لإحداث تغييرات سريعة في الحركة". ونظرًا لأن هذا النهج لا يوجه حركة محور الجسم بشكل مباشر، بل يتحكم في المرونة، فإنه يمكن أن يقلل بشكل كبير من التعقيد الحسابي وكذلك متطلبات الطاقة.
روبوت Myriapod (A) وآلية مرونة محور الجسم المتغير (B. منظر أمامي، C. منظر علوي، D. مخططات منظر علوي). (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) الآن، قام باحثون من جامعة أوساكا بتطوير روبوت "myriapod" المحاكاة الحيوية الذي يستفيد من عدم الاستقرار الطبيعي الذي يمكنه تحويل المشي المستقيم إلى حركة منحنية. وفي دراسة نشرت مؤخرا في روبوتات لينة (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)، يصف باحثون من جامعة أوساكا الروبوت الخاص بهم، والذي يتكون من ستة أجزاء (مع ساقين متصلتين بكل قطعة) ومفاصل مرنة. باستخدام برغي قابل للتعديل، يمكن تعديل مرونة الوصلات باستخدام المحركات أثناء حركة المشي. وأظهر الباحثون أن زيادة مرونة المفاصل أدت إلى حالة تسمى "تشعب المذراة"، حيث يصبح المشي المستقيم غير مستقر. وبدلاً من ذلك، ينتقل الروبوت إلى المشي بنمط منحني، إما إلى اليمين أو إلى اليسار. عادة، يحاول المهندسون تجنب خلق حالات عدم الاستقرار. ومع ذلك، فإن الاستخدام المتحكم لها يمكن أن يتيح القدرة على المناورة بكفاءة. يقول شينيا أوي، مؤلف الدراسة: "لقد استلهمنا من قدرة بعض الحشرات شديدة الحركة التي تسمح لها بالتحكم في عدم الاستقرار الديناميكي في حركتها لإحداث تغييرات سريعة في الحركة". ونظرًا لأن هذا النهج لا يوجه حركة محور الجسم بشكل مباشر، بل يتحكم في المرونة، فإنه يمكن أن يقلل بشكل كبير من التعقيد الحسابي وكذلك متطلبات الطاقة.
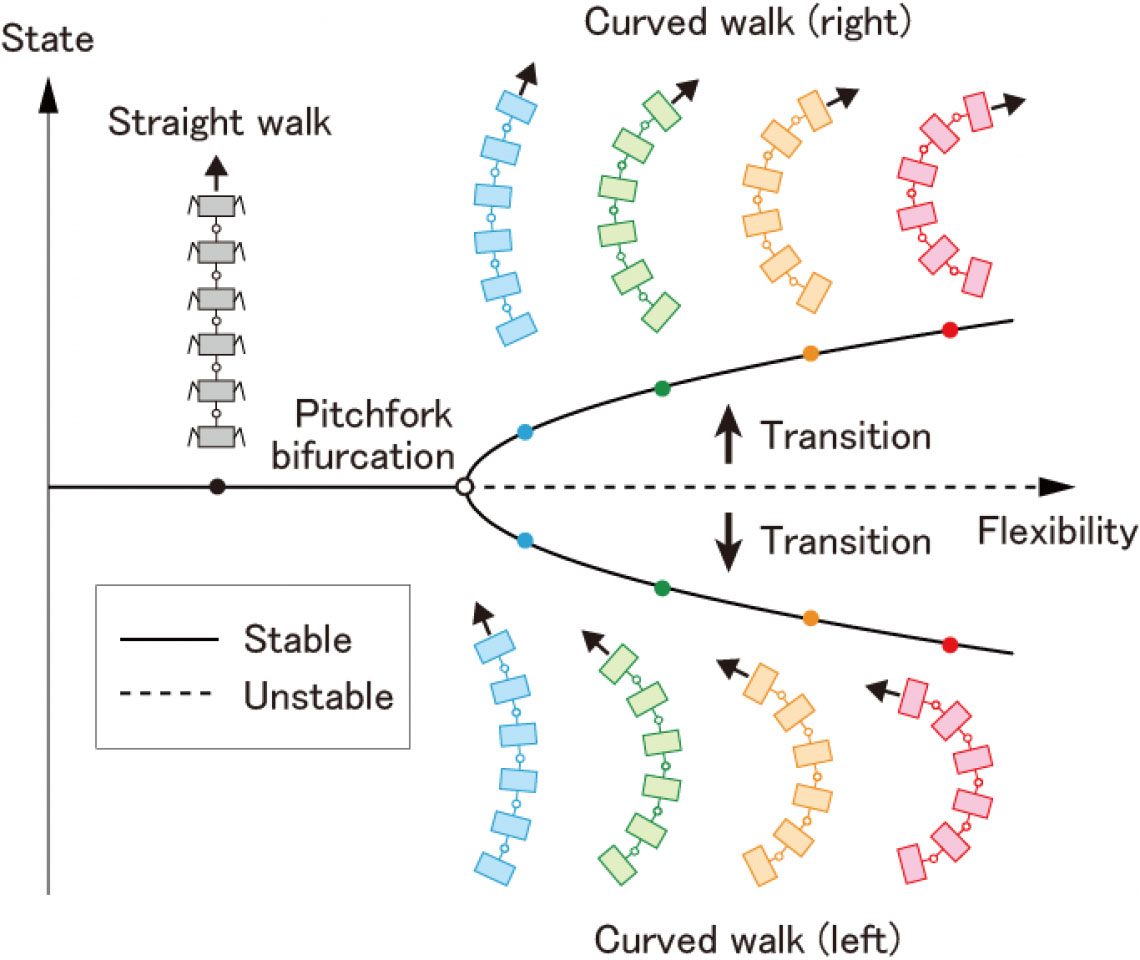 أنماط المشي المستقرة وغير المستقرة حسب مرونة محور الجسم. (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اختبر الفريق قدرة الروبوت على الوصول إلى مواقع محددة ووجد أنه يمكنه التنقل من خلال اتخاذ مسارات منحنية نحو الأهداف. يقول ماو أداتشي، مؤلف دراسة آخر: "يمكننا توقع التطبيقات في مجموعة واسعة من السيناريوهات، مثل البحث والإنقاذ، أو العمل في بيئات خطرة، أو الاستكشاف على كواكب أخرى". قد تتضمن الإصدارات المستقبلية شرائح وآليات تحكم إضافية.
أنماط المشي المستقرة وغير المستقرة حسب مرونة محور الجسم. (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اختبر الفريق قدرة الروبوت على الوصول إلى مواقع محددة ووجد أنه يمكنه التنقل من خلال اتخاذ مسارات منحنية نحو الأهداف. يقول ماو أداتشي، مؤلف دراسة آخر: "يمكننا توقع التطبيقات في مجموعة واسعة من السيناريوهات، مثل البحث والإنقاذ، أو العمل في بيئات خطرة، أو الاستكشاف على كواكب أخرى". قد تتضمن الإصدارات المستقبلية شرائح وآليات تحكم إضافية.
روبوت Myriapod (A) وآلية مرونة محور الجسم المتغير (B. منظر أمامي، C. منظر علوي، D. مخططات منظر علوي). (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) الآن، قام باحثون من جامعة أوساكا بتطوير روبوت "myriapod" المحاكاة الحيوية الذي يستفيد من عدم الاستقرار الطبيعي الذي يمكنه تحويل المشي المستقيم إلى حركة منحنية. وفي دراسة نشرت مؤخرا في روبوتات لينة (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”)، يصف باحثون من جامعة أوساكا الروبوت الخاص بهم، والذي يتكون من ستة أجزاء (مع ساقين متصلتين بكل قطعة) ومفاصل مرنة. باستخدام برغي قابل للتعديل، يمكن تعديل مرونة الوصلات باستخدام المحركات أثناء حركة المشي. وأظهر الباحثون أن زيادة مرونة المفاصل أدت إلى حالة تسمى "تشعب المذراة"، حيث يصبح المشي المستقيم غير مستقر. وبدلاً من ذلك، ينتقل الروبوت إلى المشي بنمط منحني، إما إلى اليمين أو إلى اليسار. عادة، يحاول المهندسون تجنب خلق حالات عدم الاستقرار. ومع ذلك، فإن الاستخدام المتحكم لها يمكن أن يتيح القدرة على المناورة بكفاءة. يقول شينيا أوي، مؤلف الدراسة: "لقد استلهمنا من قدرة بعض الحشرات شديدة الحركة التي تسمح لها بالتحكم في عدم الاستقرار الديناميكي في حركتها لإحداث تغييرات سريعة في الحركة". ونظرًا لأن هذا النهج لا يوجه حركة محور الجسم بشكل مباشر، بل يتحكم في المرونة، فإنه يمكن أن يقلل بشكل كبير من التعقيد الحسابي وكذلك متطلبات الطاقة.
أنماط المشي المستقرة وغير المستقرة حسب مرونة محور الجسم. (الصورة: CC BY-NC، 2023، Aoi et al.، Soft Robotics) اختبر الفريق قدرة الروبوت على الوصول إلى مواقع محددة ووجد أنه يمكنه التنقل من خلال اتخاذ مسارات منحنية نحو الأهداف. يقول ماو أداتشي، مؤلف دراسة آخر: "يمكننا توقع التطبيقات في مجموعة واسعة من السيناريوهات، مثل البحث والإنقاذ، أو العمل في بيئات خطرة، أو الاستكشاف على كواكب أخرى". قد تتضمن الإصدارات المستقبلية شرائح وآليات تحكم إضافية.
- محتوى مدعوم من تحسين محركات البحث وتوزيع العلاقات العامة. تضخيم اليوم.
- أفلاطونايستريم. ذكاء بيانات Web3. تضخيم المعرفة. الوصول هنا.
- سك المستقبل مع أدرين أشلي. الوصول هنا.
- شراء وبيع الأسهم في شركات ما قبل الاكتتاب مع PREIPO®. الوصول هنا.
- المصدر https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ليس
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- القدرة
- ماهرون
- عمل
- إضافة
- إضافي
- قابل للتعديل
- مميزات
- رشيق
- AL
- يسمح
- an
- و
- الحيوانات
- آخر
- التطبيقات
- نهج
- هي
- المناطق
- AS
- مساعدة
- At
- حاول
- المؤلفة
- مستقل
- تجنب
- محور
- BE
- لان
- يصبح
- الجسدي
- على حد سواء
- انهيار
- ابني
- لكن
- by
- تسمى
- CAN
- مركز
- معين
- التغييرات
- متغير
- مجمع
- تعقيد
- الكمبيوتر
- قوة الكمبيوتر
- متصل
- مراقبة
- ذو شاهد
- السيطرة
- ضوابط
- تحول
- استطاع
- خلق
- خلق
- خطير
- التاريخ
- الدرجة العلمية
- القسم
- اعتمادا
- وصف
- تصميم
- المتقدمة
- مباشرة
- هل
- اثنان
- أثناء
- ديناميكي
- E & T
- كل
- أرض
- فعال
- إما
- تمكين
- طاقة
- المهندسين
- أدخل
- البيئات
- حتى
- تطورت
- استكشاف
- جدا
- مرونة
- مرن
- في حالة
- وجدت
- تبدأ من
- جبهة
- وظيفة
- مستقبل
- Go
- جدا
- يملك
- مرتفع
- لكن
- HTTPS
- صورة
- تحسينات
- in
- تتضمن
- في ازدياد
- موحى
- عدم إستقرار
- بدلًا من ذلك
- إلى
- اخترع
- المحققون
- IT
- JPG
- نوع
- كبير
- ليد
- اليسار
- الساقين
- مما سيحدث
- المواقع
- الكثير
- صنع
- القيام ب
- مايو..
- ميكانيكي
- آلية
- آليات
- وسط
- التنقل
- تم التعديل
- أكثر
- اقتراح
- سيارات
- حركة
- طبيعي
- التنقل
- حاجة
- جديد
- عادة
- الآن
- عدد
- of
- غالبا
- on
- ONE
- or
- أخرى
- على مدى
- الخاصة
- نمط
- أنماط
- الكواكب
- أفلاطون
- الذكاء افلاطون البيانات
- أفلاطون داتا
- قوة
- ويوفر
- نشرت
- سريع
- نطاق
- بدلا
- الوصول
- مؤخرا
- تخفيض
- متكرر
- المتطلبات الأساسية
- يتطلب
- إنقاذ
- الباحثين
- حق
- رجل الالي
- الروبوتات
- الروبوتات
- قوي
- يقول
- سيناريوهات
- علوم
- بحث
- قطعة
- شرائح
- بقسوة
- أظهرت
- حالة
- SIX
- So
- ناعم
- قليلا
- محدد
- مستقر
- مستقيم
- إجهاد
- دراسة
- هذه
- نظام
- أنظمة
- يأخذ
- مع الأخذ
- الأهداف
- فريق
- أن
- •
- من مشاركة
- منهم
- تشبه
- إلى
- تيشرت
- نحو
- الانتقالات
- محاولة
- منعطف أو دور
- اثنان
- جامعة
- تستخدم
- استخدام
- تشكيلة
- السيارات
- بواسطة
- المزيد
- المشي
- حسن
- كان
- التي
- من الذى
- واسع
- مدى واسع
- مع
- بدون
- للعمل
- عامل
- سوف
- زفيرنت
اكثر من نانوويرك


تكامل الروبوتات القائمة على الأوريجامي التي تشعر وتقرر وتستجيب
عقدة المصدر: 2565107
الطابع الزمني: أبريل 4، 2023
هياكل غير متجانسة ثنائية / شبه ثنائية الأبعاد قائمة على البيروفسكايت: الإنشاءات والخصائص والتطبيقات
عقدة المصدر: 1938788
الطابع الزمني: فبراير 3، 2023

قام الباحثون بتفصيل خصائص لم يسبق لها مثيل في عائلة من معادن Kagome فائقة التوصيل
عقدة المصدر: 1952937
الطابع الزمني: فبراير 11، 2023
يمكن للدوائر الضوئية المتكاملة أن تساعد في سد فجوة تيراهيرتز
عقدة المصدر: 1899339
الطابع الزمني: يناير 14، 2023

يمكن خفض انبعاثات الكربون من الأسمدة بنسبة تصل إلى 80٪ بحلول عام 2050
عقدة المصدر: 1951214
الطابع الزمني: فبراير 11، 2023
متعلقات كهربية حديدية جديدة من أجل إلكترونيات دقيقة أكثر كفاءة
عقدة المصدر: 2716345
الطابع الزمني: يونيو 9، 2023
كيف يقوم محفز نانوي نحاسي حطم الرقم القياسي بتحويل ثاني أكسيد الكربون إلى وقود سائل
عقدة المصدر: 1961058
الطابع الزمني: فبراير 16، 2023
باحثون يطبعون أنسجة دماغ بشرية وظيفية بتقنية ثلاثية الأبعاد
عقدة المصدر: 3093799
الطابع الزمني: فبراير 2، 2024