03 مايو 2023 (أخبار Nanowerk) منذ اعتماد مصطلح "الروبوتات الناعمة" في عام 2008، قام المهندسون في هذا المجال ببناء تمثيلات متنوعة للآلات المرنة المفيدة في الاستكشاف، والتنقل، وإعادة التأهيل، وحتى الفضاء. أحد مصادر الإلهام: الطريقة التي تتحرك بها الحيوانات في البرية.
وقد اتخذ فريق من الباحثين في معهد ماساتشوستس للتكنولوجيا هذه الخطوة إلى الأمام، وتطويرها سوفتزو، وهي منصة مستوحاة من الطبيعة تمكن المهندسين من دراسة التصميم المشترك للروبوتات الناعمة. يعمل الإطار على تحسين الخوارزميات التي تتكون من التصميم، والذي يحدد الشكل الذي سيبدو عليه الروبوت؛ والتحكم، أو النظام الذي يمكّن الحركة الآلية، مما يحسن كيفية قيام المستخدمين تلقائيًا بإنشاء الخطوط العريضة للآلات المحتملة.
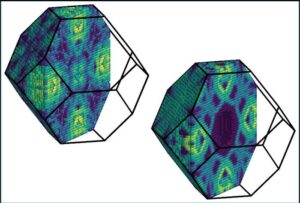
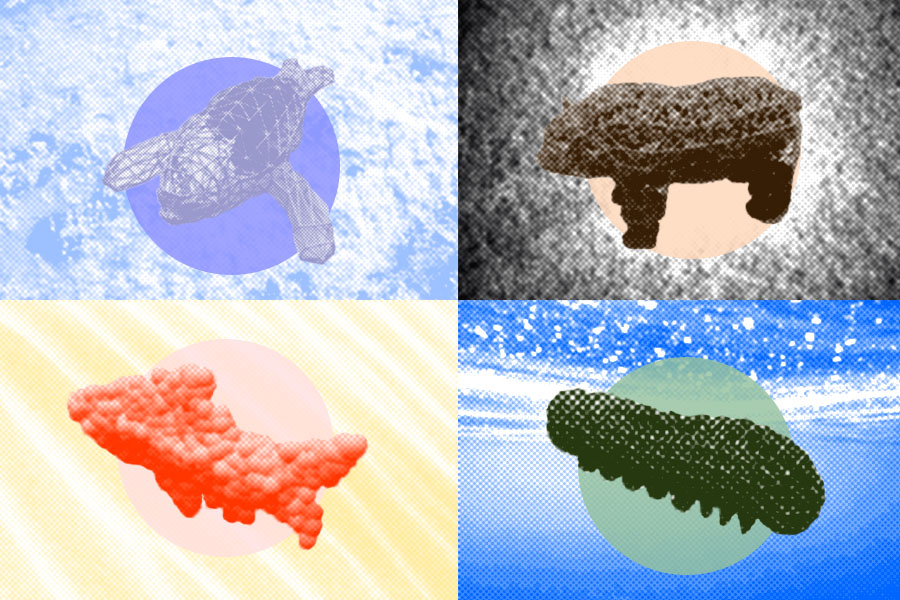 طور الباحثون نظامًا للتصميم المشترك للروبوت الناعم، وهو ما يعني البحث المشترك وتحسين تصميم الروبوت - شكل الروبوت، ومكان وضع العضلات في جسم الروبوت، ومدى ليونة الروبوت في مناطق الجسم المختلفة؛ واستناداً إلى تصميم الروبوت، طريقة التحكم به لتحقيق المهمة المستهدفة. (الصورة: Alex Shipps/MIT CSAIL والباحثون)
أثناء السير على الجانب البري، تتميز المنصة بنماذج ثلاثية الأبعاد لحيوانات مثل دب الباندا والأسماك وأسماك القرش واليرقات كتصميمات يمكنها محاكاة مهام الروبوتات الناعمة مثل الحركة والدوران الرشيق وتتبع المسار في بيئات مختلفة. سواء بالثلج أو الصحراء أو الطين أو الماء، توضح المنصة مقايضات الأداء لمختلف التصميمات في تضاريس مختلفة.
يقول تسون هسوان وانغ، طالب الدكتوراه في معهد ماساتشوستس للتكنولوجيا، وهو أحد المنتسبين إلى مختبر علوم الكمبيوتر والذكاء الاصطناعي: "يمكن لإطار العمل الخاص بنا أن يساعد المستخدمين في العثور على أفضل تكوين لشكل الروبوت، مما يسمح لهم بتصميم خوارزميات الروبوتات الناعمة التي يمكنها القيام بالعديد من الأشياء المختلفة". CSAIL) وهو الباحث الرئيسي في المشروع. "في جوهره، يساعدنا ذلك على فهم أفضل الاستراتيجيات التي يمكن للروبوتات أن تتفاعل بها مع بيئاتها."
تعد SoftZoo أكثر شمولاً من المنصات المماثلة، والتي تحاكي بالفعل التصميم والتحكم، لأنها تصمم الحركة التي تتفاعل مع السمات الفيزيائية لمختلف المناطق الأحيائية. يأتي تعدد استخدامات الإطار من محرك متعدد الفيزياء قابل للاختلاف، والذي يسمح بمحاكاة عدة جوانب من النظام المادي في نفس الوقت، مثل فقمة صغيرة تدور على الجليد أو يرقة تتحرك ببطء عبر بيئة الأراضي الرطبة. تعمل قابلية تمايز المحرك على تحسين التصميم المشترك عن طريق تقليل عدد عمليات المحاكاة المكلفة في كثير من الأحيان والمطلوبة لحل مشكلات التحكم الحسابي والتصميم. ونتيجة لذلك، يمكن للمستخدمين تصميم الروبوتات الناعمة وتحريكها باستخدام خوارزميات أكثر تعقيدًا ومحددة.
توضح قدرة النظام على محاكاة التفاعلات مع التضاريس المختلفة أهمية علم التشكل، وهو فرع من علم الأحياء يدرس أشكال وأحجام وأشكال الكائنات الحية المختلفة. اعتمادًا على البيئة، تكون بعض الهياكل البيولوجية أكثر مثالية من غيرها، تمامًا مثل مقارنة المخططات للآلات التي تكمل مهام مماثلة.
يمكن لهذه الخطوط العريضة البيولوجية أن تلهم حياة اصطناعية أكثر تخصصًا ومحددة للتضاريس. يقول وانغ: "إن الهندسة المتموجة بلطف لقنديل البحر تسمح له بالسفر بكفاءة عبر المسطحات المائية الكبيرة، مما يلهم الباحثين لتطوير سلالات جديدة من الروبوتات الناعمة ويفتح إمكانيات غير محدودة لما يمكن أن تفعله الكائنات الاصطناعية المزروعة بالكامل في السيليكو". "بالإضافة إلى ذلك، يمكن لليعسوب القيام بمناورات رشيقة للغاية لا تستطيع الكائنات الطائرة الأخرى إكمالها، لأن لديها هياكل خاصة على أجنحتها تغير مركز كتلتها عندما تطير. تعمل منصتنا على تحسين الحركة بنفس الطريقة التي يكون بها اليعسوب أكثر مهارة بشكل طبيعي في العمل عبر المناطق المحيطة به.
كافحت الروبوتات في السابق للتنقل عبر البيئات المزدحمة لأن أجسامها لم تكن متوافقة مع محيطها. ومع ذلك، مع SoftZoo، يمكن للمصممين تطوير عقل الروبوت وجسمه في وقت واحد، والتعاون في تحسين الآلات الأرضية والمائية لتكون أكثر وعيًا وتخصصًا. ومع زيادة الذكاء السلوكي والمورفولوجي، ستكون الروبوتات أكثر فائدة في إكمال مهام الإنقاذ وإجراء الاستكشاف. إذا فُقد شخص ما أثناء الفيضان، على سبيل المثال، فمن المحتمل أن يتمكن الروبوت من اجتياز المياه بكفاءة أكبر لأنه تم تحسينه باستخدام الأساليب الموضحة في منصة SotftZoo.
يضيف تشوانغ غان، الباحث المشارك في الدراسة وعالم الأبحاث في معهد ماساتشوستس للتكنولوجيا: "توفر SoftZoo محاكاة مفتوحة المصدر لمصممي الروبوتات الناعمة، مما يساعدهم على بناء روبوتات في العالم الحقيقي بسهولة ومرونة أكبر مع تسريع قدرات الحركة للآلات في بيئات متنوعة". -IBM Watson AI Lab الذي سيصبح قريبًا أستاذًا مساعدًا في جامعة ماساتشوستس في أمهرست.
تضيف دانييلا روس، مديرة CSAIL ومعهد أندرو آند آندرو: "إن هذا النهج الحسابي للتصميم المشترك لأجسام الروبوتات الناعمة وأدمغتها (أي وحدات التحكم الخاصة بها) يفتح الباب أمام إنشاء آلات مخصصة بسرعة مصممة لمهمة محددة". إرنا فيتربي أستاذة في قسم الهندسة الكهربائية وعلوم الكمبيوتر في معهد ماساتشوستس للتكنولوجيا (EECS)، وهي مؤلفة أخرى لهذا العمل.
قبل إنشاء أي نوع من الروبوتات، يمكن أن يكون الإطار بديلاً للاختبار الميداني للمشاهد غير الطبيعية. على سبيل المثال، قد يكون تقييم كيفية تصرف الروبوت الشبيه بالدب في الصحراء أمرًا صعبًا بالنسبة لفريق بحث يعمل في السهول الحضرية في بوسطن. وبدلاً من ذلك، يمكن لمهندسي الروبوتات الناعمة استخدام نماذج ثلاثية الأبعاد في SoftZoo لمحاكاة تصميمات مختلفة وتقييم مدى فعالية الخوارزميات التي تتحكم في الروبوتات الخاصة بهم في التنقل. وهذا بدوره من شأنه توفير الوقت والموارد للباحثين.
ومع ذلك، فإن القيود المفروضة على تقنيات التصنيع الحالية تقف في طريق إحياء تصميمات الروبوتات الناعمة هذه. يقول وانغ: "إن الانتقال من المحاكاة إلى الروبوت المادي لا يزال دون حل ويتطلب المزيد من الدراسة". "لا يمكن تحقيق نماذج العضلات والصلابة المتباينة مكانيًا والاستشعار في SoftZoo بشكل مباشر باستخدام تقنيات التصنيع الحالية، لذلك نحن نعمل على مواجهة هذه التحديات."
وفي المستقبل، يتطلع مصممو المنصة إلى تطبيقات في الميكانيكا البشرية، مثل التلاعب، نظرًا لقدرتها على اختبار التحكم الآلي. ولإثبات هذه الإمكانية، صمم فريق وانغ ذراعًا ثلاثية الأبعاد ترمي كرة ثلج إلى الأمام.
طور الباحثون نظامًا للتصميم المشترك للروبوت الناعم، وهو ما يعني البحث المشترك وتحسين تصميم الروبوت - شكل الروبوت، ومكان وضع العضلات في جسم الروبوت، ومدى ليونة الروبوت في مناطق الجسم المختلفة؛ واستناداً إلى تصميم الروبوت، طريقة التحكم به لتحقيق المهمة المستهدفة. (الصورة: Alex Shipps/MIT CSAIL والباحثون)
أثناء السير على الجانب البري، تتميز المنصة بنماذج ثلاثية الأبعاد لحيوانات مثل دب الباندا والأسماك وأسماك القرش واليرقات كتصميمات يمكنها محاكاة مهام الروبوتات الناعمة مثل الحركة والدوران الرشيق وتتبع المسار في بيئات مختلفة. سواء بالثلج أو الصحراء أو الطين أو الماء، توضح المنصة مقايضات الأداء لمختلف التصميمات في تضاريس مختلفة.
يقول تسون هسوان وانغ، طالب الدكتوراه في معهد ماساتشوستس للتكنولوجيا، وهو أحد المنتسبين إلى مختبر علوم الكمبيوتر والذكاء الاصطناعي: "يمكن لإطار العمل الخاص بنا أن يساعد المستخدمين في العثور على أفضل تكوين لشكل الروبوت، مما يسمح لهم بتصميم خوارزميات الروبوتات الناعمة التي يمكنها القيام بالعديد من الأشياء المختلفة". CSAIL) وهو الباحث الرئيسي في المشروع. "في جوهره، يساعدنا ذلك على فهم أفضل الاستراتيجيات التي يمكن للروبوتات أن تتفاعل بها مع بيئاتها."
تعد SoftZoo أكثر شمولاً من المنصات المماثلة، والتي تحاكي بالفعل التصميم والتحكم، لأنها تصمم الحركة التي تتفاعل مع السمات الفيزيائية لمختلف المناطق الأحيائية. يأتي تعدد استخدامات الإطار من محرك متعدد الفيزياء قابل للاختلاف، والذي يسمح بمحاكاة عدة جوانب من النظام المادي في نفس الوقت، مثل فقمة صغيرة تدور على الجليد أو يرقة تتحرك ببطء عبر بيئة الأراضي الرطبة. تعمل قابلية تمايز المحرك على تحسين التصميم المشترك عن طريق تقليل عدد عمليات المحاكاة المكلفة في كثير من الأحيان والمطلوبة لحل مشكلات التحكم الحسابي والتصميم. ونتيجة لذلك، يمكن للمستخدمين تصميم الروبوتات الناعمة وتحريكها باستخدام خوارزميات أكثر تعقيدًا ومحددة.
توضح قدرة النظام على محاكاة التفاعلات مع التضاريس المختلفة أهمية علم التشكل، وهو فرع من علم الأحياء يدرس أشكال وأحجام وأشكال الكائنات الحية المختلفة. اعتمادًا على البيئة، تكون بعض الهياكل البيولوجية أكثر مثالية من غيرها، تمامًا مثل مقارنة المخططات للآلات التي تكمل مهام مماثلة.
يمكن لهذه الخطوط العريضة البيولوجية أن تلهم حياة اصطناعية أكثر تخصصًا ومحددة للتضاريس. يقول وانغ: "إن الهندسة المتموجة بلطف لقنديل البحر تسمح له بالسفر بكفاءة عبر المسطحات المائية الكبيرة، مما يلهم الباحثين لتطوير سلالات جديدة من الروبوتات الناعمة ويفتح إمكانيات غير محدودة لما يمكن أن تفعله الكائنات الاصطناعية المزروعة بالكامل في السيليكو". "بالإضافة إلى ذلك، يمكن لليعسوب القيام بمناورات رشيقة للغاية لا تستطيع الكائنات الطائرة الأخرى إكمالها، لأن لديها هياكل خاصة على أجنحتها تغير مركز كتلتها عندما تطير. تعمل منصتنا على تحسين الحركة بنفس الطريقة التي يكون بها اليعسوب أكثر مهارة بشكل طبيعي في العمل عبر المناطق المحيطة به.
كافحت الروبوتات في السابق للتنقل عبر البيئات المزدحمة لأن أجسامها لم تكن متوافقة مع محيطها. ومع ذلك، مع SoftZoo، يمكن للمصممين تطوير عقل الروبوت وجسمه في وقت واحد، والتعاون في تحسين الآلات الأرضية والمائية لتكون أكثر وعيًا وتخصصًا. ومع زيادة الذكاء السلوكي والمورفولوجي، ستكون الروبوتات أكثر فائدة في إكمال مهام الإنقاذ وإجراء الاستكشاف. إذا فُقد شخص ما أثناء الفيضان، على سبيل المثال، فمن المحتمل أن يتمكن الروبوت من اجتياز المياه بكفاءة أكبر لأنه تم تحسينه باستخدام الأساليب الموضحة في منصة SotftZoo.
يضيف تشوانغ غان، الباحث المشارك في الدراسة وعالم الأبحاث في معهد ماساتشوستس للتكنولوجيا: "توفر SoftZoo محاكاة مفتوحة المصدر لمصممي الروبوتات الناعمة، مما يساعدهم على بناء روبوتات في العالم الحقيقي بسهولة ومرونة أكبر مع تسريع قدرات الحركة للآلات في بيئات متنوعة". -IBM Watson AI Lab الذي سيصبح قريبًا أستاذًا مساعدًا في جامعة ماساتشوستس في أمهرست.
تضيف دانييلا روس، مديرة CSAIL ومعهد أندرو آند آندرو: "إن هذا النهج الحسابي للتصميم المشترك لأجسام الروبوتات الناعمة وأدمغتها (أي وحدات التحكم الخاصة بها) يفتح الباب أمام إنشاء آلات مخصصة بسرعة مصممة لمهمة محددة". إرنا فيتربي أستاذة في قسم الهندسة الكهربائية وعلوم الكمبيوتر في معهد ماساتشوستس للتكنولوجيا (EECS)، وهي مؤلفة أخرى لهذا العمل.
قبل إنشاء أي نوع من الروبوتات، يمكن أن يكون الإطار بديلاً للاختبار الميداني للمشاهد غير الطبيعية. على سبيل المثال، قد يكون تقييم كيفية تصرف الروبوت الشبيه بالدب في الصحراء أمرًا صعبًا بالنسبة لفريق بحث يعمل في السهول الحضرية في بوسطن. وبدلاً من ذلك، يمكن لمهندسي الروبوتات الناعمة استخدام نماذج ثلاثية الأبعاد في SoftZoo لمحاكاة تصميمات مختلفة وتقييم مدى فعالية الخوارزميات التي تتحكم في الروبوتات الخاصة بهم في التنقل. وهذا بدوره من شأنه توفير الوقت والموارد للباحثين.
ومع ذلك، فإن القيود المفروضة على تقنيات التصنيع الحالية تقف في طريق إحياء تصميمات الروبوتات الناعمة هذه. يقول وانغ: "إن الانتقال من المحاكاة إلى الروبوت المادي لا يزال دون حل ويتطلب المزيد من الدراسة". "لا يمكن تحقيق نماذج العضلات والصلابة المتباينة مكانيًا والاستشعار في SoftZoo بشكل مباشر باستخدام تقنيات التصنيع الحالية، لذلك نحن نعمل على مواجهة هذه التحديات."
وفي المستقبل، يتطلع مصممو المنصة إلى تطبيقات في الميكانيكا البشرية، مثل التلاعب، نظرًا لقدرتها على اختبار التحكم الآلي. ولإثبات هذه الإمكانية، صمم فريق وانغ ذراعًا ثلاثية الأبعاد ترمي كرة ثلج إلى الأمام.
طور الباحثون نظامًا للتصميم المشترك للروبوت الناعم، وهو ما يعني البحث المشترك وتحسين تصميم الروبوت - شكل الروبوت، ومكان وضع العضلات في جسم الروبوت، ومدى ليونة الروبوت في مناطق الجسم المختلفة؛ واستناداً إلى تصميم الروبوت، طريقة التحكم به لتحقيق المهمة المستهدفة. (الصورة: Alex Shipps/MIT CSAIL والباحثون)
أثناء السير على الجانب البري، تتميز المنصة بنماذج ثلاثية الأبعاد لحيوانات مثل دب الباندا والأسماك وأسماك القرش واليرقات كتصميمات يمكنها محاكاة مهام الروبوتات الناعمة مثل الحركة والدوران الرشيق وتتبع المسار في بيئات مختلفة. سواء بالثلج أو الصحراء أو الطين أو الماء، توضح المنصة مقايضات الأداء لمختلف التصميمات في تضاريس مختلفة.
يقول تسون هسوان وانغ، طالب الدكتوراه في معهد ماساتشوستس للتكنولوجيا، وهو أحد المنتسبين إلى مختبر علوم الكمبيوتر والذكاء الاصطناعي: "يمكن لإطار العمل الخاص بنا أن يساعد المستخدمين في العثور على أفضل تكوين لشكل الروبوت، مما يسمح لهم بتصميم خوارزميات الروبوتات الناعمة التي يمكنها القيام بالعديد من الأشياء المختلفة". CSAIL) وهو الباحث الرئيسي في المشروع. "في جوهره، يساعدنا ذلك على فهم أفضل الاستراتيجيات التي يمكن للروبوتات أن تتفاعل بها مع بيئاتها."
تعد SoftZoo أكثر شمولاً من المنصات المماثلة، والتي تحاكي بالفعل التصميم والتحكم، لأنها تصمم الحركة التي تتفاعل مع السمات الفيزيائية لمختلف المناطق الأحيائية. يأتي تعدد استخدامات الإطار من محرك متعدد الفيزياء قابل للاختلاف، والذي يسمح بمحاكاة عدة جوانب من النظام المادي في نفس الوقت، مثل فقمة صغيرة تدور على الجليد أو يرقة تتحرك ببطء عبر بيئة الأراضي الرطبة. تعمل قابلية تمايز المحرك على تحسين التصميم المشترك عن طريق تقليل عدد عمليات المحاكاة المكلفة في كثير من الأحيان والمطلوبة لحل مشكلات التحكم الحسابي والتصميم. ونتيجة لذلك، يمكن للمستخدمين تصميم الروبوتات الناعمة وتحريكها باستخدام خوارزميات أكثر تعقيدًا ومحددة.
توضح قدرة النظام على محاكاة التفاعلات مع التضاريس المختلفة أهمية علم التشكل، وهو فرع من علم الأحياء يدرس أشكال وأحجام وأشكال الكائنات الحية المختلفة. اعتمادًا على البيئة، تكون بعض الهياكل البيولوجية أكثر مثالية من غيرها، تمامًا مثل مقارنة المخططات للآلات التي تكمل مهام مماثلة.
يمكن لهذه الخطوط العريضة البيولوجية أن تلهم حياة اصطناعية أكثر تخصصًا ومحددة للتضاريس. يقول وانغ: "إن الهندسة المتموجة بلطف لقنديل البحر تسمح له بالسفر بكفاءة عبر المسطحات المائية الكبيرة، مما يلهم الباحثين لتطوير سلالات جديدة من الروبوتات الناعمة ويفتح إمكانيات غير محدودة لما يمكن أن تفعله الكائنات الاصطناعية المزروعة بالكامل في السيليكو". "بالإضافة إلى ذلك، يمكن لليعسوب القيام بمناورات رشيقة للغاية لا تستطيع الكائنات الطائرة الأخرى إكمالها، لأن لديها هياكل خاصة على أجنحتها تغير مركز كتلتها عندما تطير. تعمل منصتنا على تحسين الحركة بنفس الطريقة التي يكون بها اليعسوب أكثر مهارة بشكل طبيعي في العمل عبر المناطق المحيطة به.
كافحت الروبوتات في السابق للتنقل عبر البيئات المزدحمة لأن أجسامها لم تكن متوافقة مع محيطها. ومع ذلك، مع SoftZoo، يمكن للمصممين تطوير عقل الروبوت وجسمه في وقت واحد، والتعاون في تحسين الآلات الأرضية والمائية لتكون أكثر وعيًا وتخصصًا. ومع زيادة الذكاء السلوكي والمورفولوجي، ستكون الروبوتات أكثر فائدة في إكمال مهام الإنقاذ وإجراء الاستكشاف. إذا فُقد شخص ما أثناء الفيضان، على سبيل المثال، فمن المحتمل أن يتمكن الروبوت من اجتياز المياه بكفاءة أكبر لأنه تم تحسينه باستخدام الأساليب الموضحة في منصة SotftZoo.
يضيف تشوانغ غان، الباحث المشارك في الدراسة وعالم الأبحاث في معهد ماساتشوستس للتكنولوجيا: "توفر SoftZoo محاكاة مفتوحة المصدر لمصممي الروبوتات الناعمة، مما يساعدهم على بناء روبوتات في العالم الحقيقي بسهولة ومرونة أكبر مع تسريع قدرات الحركة للآلات في بيئات متنوعة". -IBM Watson AI Lab الذي سيصبح قريبًا أستاذًا مساعدًا في جامعة ماساتشوستس في أمهرست.
تضيف دانييلا روس، مديرة CSAIL ومعهد أندرو آند آندرو: "إن هذا النهج الحسابي للتصميم المشترك لأجسام الروبوتات الناعمة وأدمغتها (أي وحدات التحكم الخاصة بها) يفتح الباب أمام إنشاء آلات مخصصة بسرعة مصممة لمهمة محددة". إرنا فيتربي أستاذة في قسم الهندسة الكهربائية وعلوم الكمبيوتر في معهد ماساتشوستس للتكنولوجيا (EECS)، وهي مؤلفة أخرى لهذا العمل.
قبل إنشاء أي نوع من الروبوتات، يمكن أن يكون الإطار بديلاً للاختبار الميداني للمشاهد غير الطبيعية. على سبيل المثال، قد يكون تقييم كيفية تصرف الروبوت الشبيه بالدب في الصحراء أمرًا صعبًا بالنسبة لفريق بحث يعمل في السهول الحضرية في بوسطن. وبدلاً من ذلك، يمكن لمهندسي الروبوتات الناعمة استخدام نماذج ثلاثية الأبعاد في SoftZoo لمحاكاة تصميمات مختلفة وتقييم مدى فعالية الخوارزميات التي تتحكم في الروبوتات الخاصة بهم في التنقل. وهذا بدوره من شأنه توفير الوقت والموارد للباحثين.
ومع ذلك، فإن القيود المفروضة على تقنيات التصنيع الحالية تقف في طريق إحياء تصميمات الروبوتات الناعمة هذه. يقول وانغ: "إن الانتقال من المحاكاة إلى الروبوت المادي لا يزال دون حل ويتطلب المزيد من الدراسة". "لا يمكن تحقيق نماذج العضلات والصلابة المتباينة مكانيًا والاستشعار في SoftZoo بشكل مباشر باستخدام تقنيات التصنيع الحالية، لذلك نحن نعمل على مواجهة هذه التحديات."
وفي المستقبل، يتطلع مصممو المنصة إلى تطبيقات في الميكانيكا البشرية، مثل التلاعب، نظرًا لقدرتها على اختبار التحكم الآلي. ولإثبات هذه الإمكانية، صمم فريق وانغ ذراعًا ثلاثية الأبعاد ترمي كرة ثلج إلى الأمام.
- محتوى مدعوم من تحسين محركات البحث وتوزيع العلاقات العامة. تضخيم اليوم.
- أفلاطونايستريم. ذكاء بيانات Web3. تضخيم المعرفة. الوصول هنا.
- سك المستقبل مع أدرين أشلي. الوصول هنا.
- المصدر https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :لديها
- :يكون
- :ليس
- :أين
- $ UP
- 10
- 11
- 12
- 8
- 9
- a
- القدرة
- تسريع
- التأهيل
- في
- يضيف
- اعتمد
- التسويق بالعمولة
- رشيق
- AI
- اليكس
- خوارزميات
- السماح
- يسمح
- سابقا
- an
- و
- أندرو
- الحيوانات
- آخر
- أي وقت
- التطبيقات
- نهج
- هي
- ARM
- أسلحة
- مصطنع
- الذكاء الاصطناعي
- AS
- الجوانب
- تقييم
- المساعد
- At
- المؤلفة
- تلقائيا
- الأطفال
- على أساس
- BE
- تتحمل
- لان
- كان
- قبل
- أفضل
- علم الاحياء
- الجسدي
- بوسطن
- على حد سواء
- دماغ
- عقل
- الفرع
- وبذلك
- نساعدك في بناء
- ابني
- by
- CAN
- لا تستطيع
- قدرات
- قادر على
- مركز
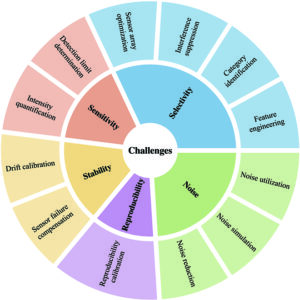
- التحديات
- تحدي
- تغيير
- مؤلف مشارك
- يأتي
- مقارنة
- إكمال
- الانتهاء
- متوافقة
- شامل
- الكمبيوتر
- علوم الكمبيوتر
- إجراء
- الاعداد
- مراقبة
- السيطرة
- استطاع
- خلق
- CSAIL
- حالياًّ
- حسب الطلب
- التاريخ
- شرح
- تظاهر
- يوضح
- القسم
- اعتمادا
- صحراء
- تصميم
- تصميم
- المصممين
- تصاميم
- يحدد
- تطوير
- المتقدمة
- تطوير
- مختلف
- مدير المدارس
- عدة
- do
- منتجات الأبواب
- اليعسوب
- اليعسوب
- أثناء
- بسهولة
- الطُرق الفعّالة
- بكفاءة
- الهندسة الكهربائية
- تمكن
- محرك
- الهندسة
- المهندسين
- تماما
- البيئة
- البيئات
- جوهر
- تقييم
- حتى
- مثال
- ذو تكلفة باهظة
- استكشاف
- المميزات
- حقل
- مرن
- فيضان
- طيران
- متابعيك
- في حالة
- أشكال
- إلى الأمام
- الإطار
- تبدأ من
- إضافي
- مستقبل
- توليد
- علم الهندسة
- معطى
- يفهم، يمسك، يقبض
- يملك
- مساعدة
- مساعدة
- يساعد
- كيفية
- HTTPS
- الانسان
- ICE
- if
- يوضح
- صورة
- أهمية
- تحسين
- in
- بما فيه
- زيادة
- إلهام
- إلهام
- ملهمة
- بدلًا من ذلك
- رؤيتنا
- تفاعل
- التفاعلات
- IT
- انها
- JPG
- مختبر
- مختبر
- كبير
- قيادة
- الحياة
- مثل
- القيود
- بحث
- يبدو مثل
- الآلات
- تلاعب
- كثير
- كتلة
- ماساتشوستس
- مايو..
- يعني
- علم الميكانيكا
- طرق
- وسط
- مفقود
- البعثات
- معهد ماساتشوستس للتكنولوجيا
- عارضات ازياء
- الأكثر من ذلك
- اقتراح
- خطوة
- حركة
- كثيرا
- التنقل
- قائمة الإختيارات
- جديد
- عدد
- الأجسام
- of
- غالبا
- on
- ONE
- المصدر المفتوح
- افتتاح
- يفتح
- الأمثل
- الأمثل
- المثلى
- تحسين
- or
- أخرى
- أخرى
- لنا
- حدود
- مسار
- نفذ
- أداء
- شخص
- مادي
- المنصة
- بلاتفورم
- أفلاطون
- الذكاء افلاطون البيانات
- أفلاطون داتا
- إمكانيات
- محتمل
- يحتمل
- سابقا
- مشاكل
- البروفيسور
- تنفيذ المشاريع
- ويوفر
- وضع
- بسرعة
- يتفاعل
- العالم الحقيقي
- أدركت
- تقليص
- المناطق
- إعادة تأهيل
- بقايا
- مطلوب
- يتطلب
- إنقاذ
- بحث
- الباحث
- الباحثين
- الموارد
- نتيجة
- رجل الالي
- الروبوتات
- الروبوتات
- نفسه
- حفظ
- يقول
- مشاهد
- علوم
- عالم
- البحث
- عدة
- الشكل
- الأشكال
- أسماك القرش
- جانب
- مماثل
- محاكاة
- معا
- منذ
- الأحجام
- ثلج
- So
- ناعم
- حل
- بعض
- قريبا
- متطور
- مصدر
- الفضاء
- تختص
- متخصص
- محدد
- محدد
- كومة
- موقف
- خطوة
- لا يزال
- استراتيجيات
- طالب
- دراسات
- دراسة
- هذه
- نظام
- مع الأخذ
- الهدف
- مهمة
- المهام
- فريق
- تقنيات
- أرضي
- تجربه بالعربي
- الاختبار
- من
- أن
- •
- المستقبل
- من مشاركة
- منهم
- then
- تشبه
- هم
- الأشياء
- على الرغم من؟
- عبر
- رمي
- الوقت
- إلى
- سفر
- منعطف أو دور
- تحول
- نوع
- فهم
- جامعة
- غير محدود
- في المناطق الحضرية
- us
- تستخدم
- المستخدمين
- استخدام
- مختلف
- جدا
- وكان
- مياه
- مياه
- واتسون
- طريق..
- we
- كان
- ابحث عن
- متى
- سواء
- التي
- في حين
- من الذى
- بري
- برية
- سوف
- مع
- للعمل
- عامل
- سوف
- زفيرنت
اكثر من نانوويرك

اكتشف العلماء طريقة جديدة لتوليد جزيئات معدنية نانوية لاستخدامها كمحفزات
عقدة المصدر: 3039388
الطابع الزمني: ديسمبر 28،

يتحكم الذكاء الاصطناعي وكريسبر بدقة في التعبير الجيني
عقدة المصدر: 2747420
الطابع الزمني: يوليو 3، 2023
يوفر النحل والجذور الروبوتية الأمل في بيئة صحية وغذاء كافٍ
عقدة المصدر: 1977685
الطابع الزمني: فبراير 25، 2023

يمكن استخدام مادة كربونية بحجم النانو لعلاج متلازمة داون
عقدة المصدر: 2778869
الطابع الزمني: يوليو 21، 2023
تشابك عصبي تم إنشاؤه من المواد الأساسية لأجهزة تلفزيون OLED
عقدة المصدر: 2541090
الطابع الزمني: مارس 24 ،2023

تسريع إنتاج أشباه الموصلات المستدامة باستخدام "الحبر متعدد العناصر"
عقدة المصدر: 2911790
الطابع الزمني: سبتمبر 28، 2023
محفز نانوي يعمل بالضوء لإنتاج الهيدروجين باستخدام ضوء الشمس
عقدة المصدر: 3053672
الطابع الزمني: يناير 10، 2024
يلاحظ العلماء الانتقال إلى السلوك الفوضوي على مقياس نانومتر
عقدة المصدر: 1982382
الطابع الزمني: فبراير 27، 2023

تتعاون الروبوتات والذكاء الاصطناعي لاكتشاف محفزات انتقائية للغاية
عقدة المصدر: 1940293
الطابع الزمني: فبراير 3، 2023